
6.3: Motores magnéticos rotativos
- Page ID
- 125828

Motores magnéticos rotativos conmutados
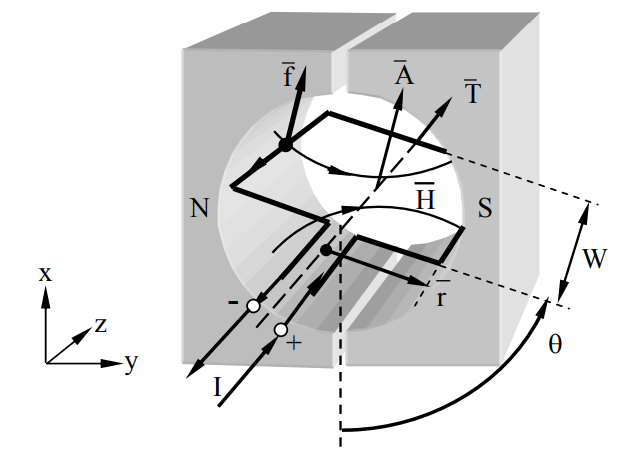
La mayoría de los motores y generadores eléctricos son rotativos porque su movimiento puede ser continuo y de alta velocidad, lo que mejora la densidad de potencia y la eficiencia mientras prolonga la vida útil del equipo. La Figura 6.3.1 ilustra un motor idealizado con un rotor que comprende un solo bucle de cable que transporta corriente I en el campo magnético uniforme\(\overline{\mathrm{H}}\). El campo magnético puede originarse a partir de imanes permanentes en el estator estacionario, que es la estructura magnética dentro de la cual gira el rotor, o de corrientes que fluyen en cables envueltos alrededor del estator. El rotor normalmente tiene muchas vueltas de alambre, a menudo envueltas alrededor de un núcleo de acero con polos que casi contactan con el estator a lo largo de una superficie cilíndrica.
El par total (fuerza por radio) en el eje motor se encuentra sumando las contribuciones de cada uno de los cuatro lados del bucle de corriente; solo los elementos longitudinales de longitud W en el radio\(\overline{\mathrm{r}}\) contribuyen, sin embargo. Este vector de par total\(\overline{\mathrm{T}}=\overline{\mathrm{f}} \times \overline{\mathrm{r}}\) es la integral de las contribuciones de par de torsión de la densidad de fuerza F que actúa sobre cada longitud incremental ds del cable a lo largo de todo su contorno C:
\[\overline{\mathrm{T}}=\oint_{\mathrm{C}} \overline{\mathrm{r}} \times \overline{\mathrm{F}} \mathrm{d} \mathrm{s} \qquad\qquad\qquad\text{(torque on rotor)}\]
La densidad de fuerza\(\overline{\mathrm{F}} \) [N m -1] en un alambre que transportaba corriente\( \overline{\mathrm{I}}\) en un campo magnético se\( \overline{\mathrm{H}}\) desprende de la ecuación de fuerza de Lorentz (5.1.1) y estuvo dada por (5.2.7):
\[ \overline{\mathrm{F}}=\overline{\mathrm{I}} \times \mu_{\mathrm{o}} \overline{\mathrm{H}} \ \left[\mathrm{N} \mathrm{m}^{-1}\right] \qquad \qquad \qquad \text { (force density on wire) }\]
Por lo tanto, el par para este motor en el instante de la imagen es en sentido horario e igual a
\[\overline{\mathrm{T}}=\hat{z} 2 \mathrm{rI} \mu_{\mathrm{o}} \mathrm{HW}\ [\mathrm{Nm}] \]
En el caso especial donde\( \overline{\mathrm{H}}\) es uniforme sobre el área de la bobina A o = 2Rw, podemos definir el momento magnético\(\overline{\mathrm{M}} \) de la bobina, donde\(|\overline{\mathrm{M}}|=\mathrm{IA}_{\mathrm{o}} \) y donde el vector\(\overline{\mathrm{M}} \) se define en un sentido derecho relativo al bucle de corriente\(\overline{\mathrm{I}} \). Entonces:
\[\overline{\mathrm{T}}=\overline{\mathrm{M}} \times \mu_{\mathrm{o}} \overline{\mathrm{H}}\]
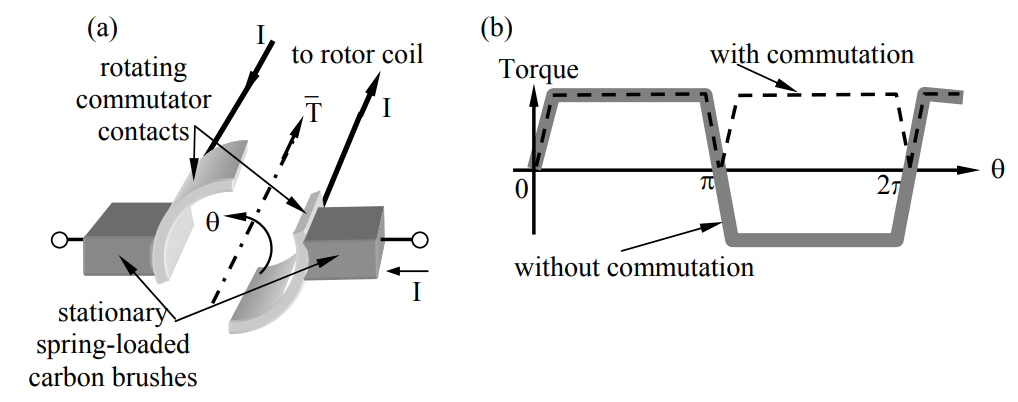
Debido a que la corriente fluye solo en la dirección dada,\( \overline{\mathrm{H}}\) y el par inverso a medida que el bucle de alambre pasa a través de la vertical (θ = n\(\pi\)) y tienen valor promedio cero sobre una rotación completa. Para lograr un par promedio positivo, se puede agregar un conmutador, que es un interruptor mecánico en el rotor que conecta uno o más devanados del rotor con una o más fuentes de corriente estacionarias en la secuencia y polaridad deseadas. El conmutador invierte la dirección de la corriente en los momentos elegidos para maximizar el par positivo promedio. Se sugiere una configuración típica en la Figura 6.3.2 (a) donde dos escobillas de carbón cargadas por resorte pasan la corriente I a los contactos del colector, los cuales están rígidamente unidos al rotor para invertir la polaridad de la corriente dos veces por revolución. Esto produce el historial de par T (θ) más casi constante ilustrado por la línea discontinua en la Figura 6.3.2 (b). En este análisis aproximado de un motor de CC suponemos que la constante de tiempo L/R asociada a la inductancia del rotor L y la resistencia del circuito R es corta en comparación con las inversiones de par ilustradas en la Figura 6.3.2 (b).
La energía se conserva, por lo que si los devanados no tienen pérdidas, entonces la potencia eléctrica promedio entregada al motor\(\mathrm{P}_{\mathrm{e}}=\langle\mathrm{VI}\rangle\), es igual a la potencia mecánica promedio entregada al ambiente:
\[\mathrm{P}_{\mathrm{m}}=\mathrm{f}_{\mathrm{m}} \mathrm{v}_{\mathrm{m}}=\mathrm{f}_{\mathrm{m}} \mathrm{r}_{\mathrm{m}} \omega=\mathrm{T} \omega\]
donde v m es la velocidad aplicada a la carga del motor por fuerza f m en el radio r m. Si el motor es accionado por una fuente de corriente I, entonces el voltaje a través de los devanados del rotor en este caso sin pérdidas es:
\[\mathrm{V}=\mathrm{P}_{\mathrm{e}} / \mathrm{I}=\mathrm{P}_{\mathrm{m}} / \mathrm{I}=\mathrm{T} \omega / \mathrm{I}\]
Este mismo voltaje V a través de los devanados del rotor también se puede deducir de la fuerza de Lorentz\( \overline{\mathrm{f}}=\mathrm{q}\left(\overline{\mathrm{E}}+\overline{\mathrm{v}} \times \mu_{\mathrm{o}} \overline{\mathrm{H}}\right)\), (6.1.1), que actúa sobre electrones de conducción libre dentro de los devanados de alambre a medida que se mueven a través de ellos\(\overline{\mathrm{H}}\). Por ejemplo, si el motor es de circuito abierto (I ≡ 0), estos electrones que giran alrededor del eje del rotor a velocidad\(\overline{\mathrm{v}}\) se moverán a lo largo del cable debido a la fuerza\( q \overline{\mathrm{v}} \times \mu_{\mathrm{o}} \overline{\mathrm{H}}\) "" sobre ellos hasta que hayan cargado partes de ese cable con relación a otras partes para producir una “\(q \overline{\mathrm{E}}\)” fuerza que equilibra el local fuerza magnética, produciendo equilibrio y cero corriente adicional. Los electrones libres en equilibrio se han reposicionado por lo que no experimentan ninguna fuerza neta de Lorentz. Por lo tanto:
\[\overline{\mathrm{E}}=-\overline{\mathrm{v}} \times \mu_{\mathrm{o}} \overline{\mathrm{H}} \quad\left[\mathrm{V} \mathrm{m}^{-1}\right] \qquad \qquad\qquad\text { (electric field inside moving conductor) }\]
La integral de\(\overline{\mathrm{E}}\) desde un extremo del cable conductor al otro produce el voltaje de circuito abierto\(\Phi\), que es el voltaje Thevenin para este cable móvil y a menudo se llama voltaje de retorno del motor. \(\Phi\)varía solo con la velocidad del rotor y H, independientemente de cualquier carga. Para el motor de la Figura 6.3.1, la Ecuación (6.3.7) produce el voltaje de circuito abierto para una bobina de una vuelta:
\[\Phi=2 \mathrm{EW}=2 \mathrm{v} \mu_{\mathrm{o}} \mathrm{HW}=2 \omega \mathrm{r} \mu_{\mathrm{o}} \mathrm{HW}=\omega \mathrm{A}_{\mathrm{o}} \mu_{\mathrm{o}} \mathrm{H} \ [\mathrm{V}] \qquad \qquad \qquad(\text { motor back-voltage })\]
donde el área de la bobina de una sola vuelta es A o = 2Rw. Si la bobina tiene N vueltas, entonces A o se reemplaza por NA o in (6.3.8).
Los circuitos equivalentes de Thevenin que representan el motor y su circuito externo determinan la corriente I, como se ilustra en la Figura 6.3.3.
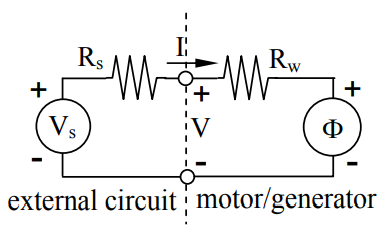
R w es la resistencia del devanado del motor, donde:
\[\mathrm{I}=\left(\mathrm{V}_{\mathrm{s}}-\Phi\right) /\left(\mathrm{R}_{\mathrm{s}}+\mathrm{R}_{\mathrm{w}}\right) \qquad \qquad \qquad \text { (motor current) }\]
Cuando el motor está arrancando por primera vez, ω\(\Phi\) = 0 y la corriente y el par son máximos, donde I max = V s/(R s + R w). El par máximo, o “par de arranque” de (6.3.3), donde A o = 2Rw y hay N vueltas, es:
\[\overline{\mathrm{T}}_{\max }=\hat{\mathrm{z}} 2 \mathrm{WrNI}_{\max } \mu_{\mathrm{o}} \mathrm{H}=\hat{\mathrm{z}} \mathrm{NA}_{\mathrm{o}} \mathrm{I}_{\max } \mu_{\mathrm{o}} \mathrm{H}\ [\mathrm Nm]\]
Desde\(\Phi\) = 0 cuando\(\overline{\mathrm{v}}=0\),, I\(\Phi\) = 0 y no se convierte entonces ninguna potencia. A medida que el motor acelera hacia su máximo ω, la contratensión aumenta\(\Phi\) constantemente hasta que iguala la tensión de fuente V s de manera que la tensión neta de accionamiento, el par T y la corriente I → 0 a ω = ω máx. Ya que (6.3.8) dice\(\Phi\) = ΩnA o μ o H, se deduce que si\(\Phi\) = V s, entonces:
\[\omega_{\max }=\frac{V_{s}}{N A_{o} \mu_{o} H}=\frac{V_{s} I_{\max }}{T_{\max }}\]
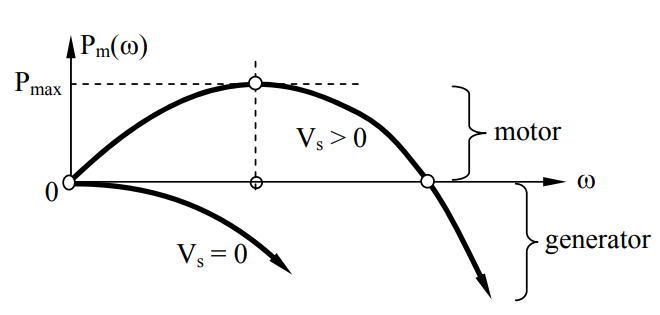
donde la relación con T max proviene de (6.3.10), y ω max ocurre a T min. = 0. A ω max no se está convirtiendo potencia, por lo que la potencia máxima de salida del motor P max ocurre a una velocidad intermedia ω p, como se ilustra en la Figura 6.3.4.
Una expresión para la potencia de salida mecánica P m (ω) se desprende de (6.3.9):
\[P_{\mathrm{m}}=\mathrm{T} \omega=\mathrm{I} \Phi=\left(\mathrm{V}_{\mathrm{s}} \Phi-\Phi^{2}\right) /\left(\mathrm{R}_{\mathrm{s}}+\mathrm{R}_{\mathrm{w}}\right) \qquad \qquad \qquad \text{(mechanical power out)}\]
donde (6.3.8) dice\(\Phi\) = ΩnA o μ o H, entonces P m ∝ (V s ω - NA o μ o Hω 2).
La ecuación (6.3.12) dice que si V s >>\(\Phi\), lo que ocurre para valores modestos de ω, entonces la potencia del motor aumenta linealmente con\(\Phi\) y ω. Además, si V s = 0, entonces P m es negativo y el dispositivo actúa como generador y transfiere energía eléctrica a R s + R w proporcional a\(\Phi^{2}\) y por lo tanto ω 2. Además, si diferenciamos P m con respecto\(\Phi\) y establecemos el resultado a cero, encontramos que la potencia mecánica es mayor cuando\(\Phi\) = V s /2, lo que implica ω p = ω max /2. Ya sea en el caso del motor o del generador, la transferencia máxima de potencia suele estar limitada por corrientes que sobrecalientan el aislamiento o por altos voltajes que causan avería. Incluso cuando no se transfiere energía, la contratensión\(\Phi\) podría causar avería si el dispositivo gira demasiado rápido. Los interruptores semiconductores que pueden fallar antes del aislamiento del motor están reemplazando cada vez más a los conmutadores, por lo que el riesgo de un exceso de ω suele ser un problema En un diseño óptimo del motor, todos los tipos de fallas suelen ocurrir cerca de los mismos niveles de carga o niveles de probabilidad.
Los parámetros típicos para un motor conmutado de 2 pulgadas de este tipo podrían ser: 1) B = μOH = 0.4 Tesla (4000 gauss) proporcionados por imanes permanentes en el estator, 2) una bobina N = 50 vueltas en el rotor con área efectiva A = 10 -3 N [m 2], 3) Vs = 24 voltios, y 4) R s + R w = 0.1 ohmios. Entonces se deduce de (6.3.11), (6.3.12) para\(\Phi\) = V s /2, y (6.3.10), respectivamente, que:
\[\omega_{\max }=V_{s} / \mu_{0} \mathrm{H A N}=24 /\left(0.4 \times 10^{-3} \times 50\right)=1200 \ \left[\mathrm{rs}^{-1}\right] \Rightarrow 11,460 \ [\mathrm{rpm}]^{25}\]
\[P_{\max }=\left(V_{s} \Phi-\Phi^{2}\right) /\left(R_{s}+R_{w}\right)=V_{s}^{2} /\left[4\left(R_{s}+R_{w}\right)\right] \ [W]=24^{2} / 0.4 \cong 1.4 \ [\mathrm{kW}]\]
\[\mathrm{T}_{\max }=\mathrm{AN} \mu_{\mathrm{o}} \mathrm{HI}_{\mathrm{max}}=\mathrm{A} \mu_{\mathrm{o}} \mathrm{HV}_{\mathrm{s}} /\left(\mathrm{R}_{\mathrm{s}}+\mathrm{R}_{\mathrm{w}}\right)=0.05 \times 0.4 \times 24 / 0.1=4.8 \ [\mathrm{Nm}]\]
25 La abreviatura “rpm” significa revoluciones por minuto.
En la práctica, la mayoría de los motores como el de la Figura 6.3.1 envuelven los devanados del rotor alrededor de un núcleo de alta permeabilidad con un espacio delgado entre el rotor y el estator; esto maximiza H cerca de la corriente I. Además, si la unidad se usa como generador de CA, entonces puede no haber necesidad del conmutador de conmutación de polaridad si se desea frecuencia de salida es simplemente la frecuencia de rotación del rotor.
Diseñe un motor magnético de CC conmutado que ofrezca una potencia mecánica máxima de 1 kW a 600 rpm. Asumir B = 0.2 Tesla y que el voltaje de la fuente V s = 50 voltios.
Solución
La potencia mecánica máxima se entrega a ω p = ω max /2 (ver Figura 6.3.4). Resolviendo (6.3.13) rinde NA o = V s/(ω max μ o H) = = 50/ (\(\pi\)2×600×60×2 ×0.2), = 5.53×10 -4, donde ω max corresponde a 1200 rpm. Si N = 6, entonces el área de bobinado 2Rw = A o 1 cm 2. Para encontrar I max utilizamos (6.3.14) para encontrar el valor máximo permitido de R s + R w = (V s\(\Phi\) -\(\Phi^{2}\)) /P m. Pero cuando la potencia mecánica entregada P mech es máxima,\(\Phi\) = Vs/2, entonces R s + R w = (50×25 - 25 2) /10 3 = 0.63Ω, lo que podría limitar N si el cable es demasiado delgado. I max = V s/(R s + R w) = = 50/0.63 = 80 [A]. El par de arranque T max = I max (NA o) μ o H = = 80 (5.53×10 -4) 0.2 = 0.22 [N m]. Este motor de kilovatios ocupa una fracción de pulgada cúbica y por lo tanto puede sobrecalentarse porque el rotor es pequeño y su conexión térmica con el mundo externo es pobre excepto a través del eje. Probablemente se utilice mejor en ráfagas cortas entre períodos de enfriamiento. La potencia térmica I 2 R w disipada en el rotor depende del diseño del cable.
Motores de reluctancia
Los motores de reluctancia combinan las ventajas del movimiento rotativo con la ausencia de corrientes del rotor y los contactos rotativos asociados. La Figura 6.3.5 sugiere una configuración idealizada simple con una sola bobina de accionamiento.
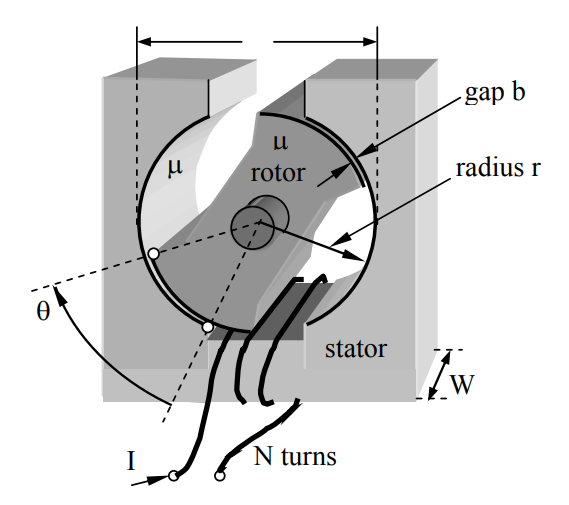
Cuando la bobina es energizada el rotor es arrastrado por los campos magnéticos para alinearse con los campos magnéticos que unen los dos polos del estator, donde μ >> μ o tanto en el rotor como en el estator. Sin embargo, los motores de reluctancia deben detectar la posición angular del rotor, por lo que el devanado (s) del estator se puede excitar en los momentos adecuados para tirar del rotor pasivo de alto μ hacia su siguiente posición de rotación, y luego no retardarlo a medida que avanza hacia la siguiente posición atractiva. Por ejemplo, la corriente I en la figura tirará del rotor para aumentar θ, que es el ángulo de solapamiento entre el rotor y los polos del estator. Una vez que se completa el solapamiento, la corriente I se pondría a cero como las costas del rotor hasta que los polos nuevamente tengan θ 0 y estén en posición de ser arrastrados hacia adelante nuevamente por I. Dichos motores son eficientes si las pérdidas por histéresis en el estator y el rotor son modestas y los devanados del estator son casi sin pérdidas.
El par en dicho motor de reluctancia se puede calcular fácilmente utilizando (6.2.12):
\[\mathrm{T}=-\mathrm{d} \mathrm{w}_{\mathrm{T}} / \mathrm{d} \theta \ [\mathrm{Nm}]\]
La energía magnética total w T incluye w μ dentro del rotor y estator, w g en los espacios de aire entre ellos y cualquier energía en la fuente de alimentación que acciona el motor. Afortunadamente podemos simplificar el problema al señalar que w g generalmente domina, y que al cortocircuitar el estator existe el mismo par sin ninguna fuente de alimentación si permanezco sin cambios.
Las circunstancias para las que la energía de brecha domina la energía total w T se encuentran fácilmente a partir de la forma integral estática de la ley de Ampere (1.4.1):
\[\mathrm{NI}=\oint_{\mathrm{C}}\left(\overline{\mathrm{H}}_{\mathrm{gap}}+\overline{\mathrm{H}}_{\mathrm{stator}}+\overline{\mathrm{H}}_{\mathrm{rotor}}\right) \bullet \mathrm{d} \overline{\mathrm{s}} \cong 2 \mathrm{b} \mathrm{H}_{\mathrm{gap}}\]
Para derivar un resultado aproximado podemos suponer que la bobina tiene N vueltas, el ancho de cada hueco es b, y el contorno C enrosca la bobina y el resto del motor sobre una distancia ~2D, y a través de una sección transversal aproximadamente constante A; D es el diámetro del rotor. Dado que las condiciones de límite en cada hueco requieren\(\overline{\mathrm{B}}_{\perp}\) ser continuas\(\mu \mathrm{H}_{\mu} \cong \mu_{\mathrm{o}} \mathrm{H}_{\mathrm{g}}\),, donde H μ H estator rotor H y H g ≡ H gap. Las energías relativas almacenadas en los dos huecos y el rotor/estator son:
\[\mathrm{w}_{\mathrm{g}} \cong 2 \mathrm{bA}\left(\mu_{\mathrm{o}} \mathrm{H}_{\mathrm{g}}^{2} / 2\right)\]
\[\mathrm{w}_{\mathrm{r} / \mathrm{s}} \cong 2 \mathrm{DA}\left(\mu \mathrm{H}_{\mu}^{2} / 2\right)\]
Su relación es:
\[\mathrm{w}_{\mathrm{g}} / \mathrm{w}_{\mathrm{r} / \mathrm{s}}=2 \mathrm{b}\left(\mu_{\mathrm{o}} / \mu\right)\left(\mathrm{H}_{\mathrm{g}} / \mathrm{H}_{\mu}\right)^{2} / 2 \mathrm{D}=\mathrm{b}\left(\mu / \mu_{\mathrm{o}}\right) / \mathrm{D}\]
Así w g >> w μ si b/D >> μ o/μ. Dado que los huecos son comúnmente b 100 micrones, y el hierro o el acero se utilizan a menudo en motores de reluctancia, μ 3000, por lo que la energía de brecha w g domina si el diámetro del motor D << 0.3 metros. Si esta aproximación no se aplica entonces el análisis se vuelve algo más complejo porque ambas energías deben ser consideradas; los motores de reluctancia pueden ser mucho mayores que 0.3 metros y aún funcionan.
Bajo las aproximaciones w T w g y A = área de hueco = RθW, podemos calcular el par T usando (6.3.16) y (6.3.18): 26
\[\mathrm{T}=-\mathrm{d} \mathrm{w}_{\mathrm{g}} / \mathrm{d} \theta=-\mathrm{b} \mu_{\mathrm{o}} \mathrm{d}\left(\mathrm{A}\left|\mathrm{H}_{\mathrm{g}}\right|^{2}\right) / \mathrm{d} \theta\]
26 La dependencia aproximada (6.3.19) de w r/s sobre A = RθW se descompone cuando θ→0, ya que w g no domina entonces y (6.3.19) se vuelve aproximada.
La dependencia θ de Hg se puede encontrar a partir de la ley de Faraday integrando\(\overline{\mathrm{E}}\) alrededor de la bobina cortocircuitada:
\[\oint_{\mathrm{c} \text { coil }} \overline{\mathrm{E}} \bullet \mathrm{d} \overline{\mathrm{s}}=-\mathrm{N} \oiint_{\mathrm{A}}(\mathrm{d} \overline{\mathrm{B}} / \mathrm{dt}) \bullet \mathrm{d} \overline{\mathrm{a}}=-\mathrm{d} \Lambda / \mathrm{d} \mathrm{t}=0\]
El enlace de flujo λ es independiente de θ y constante alrededor del motor [contorno C de (6.3.17)], por lo que λ, w g y T se evalúan fácilmente en el hueco donde el área es A = RθW:
\[\Lambda=\mathrm{N} \int_{\mathrm{A}} \overline{\mathrm{B}} \bullet \mathrm{d} \overline{\mathrm{a}}=\mathrm{NB}_{\mathrm{g}} \mathrm{A}=\mathrm{N} \mu_{\mathrm{o}} \mathrm{H}_{\mathrm{g}} \mathrm{r} \theta \mathrm{W}\]
\[\mathrm{w}_{\mathrm{g}}=2\left(\mu_{\mathrm{o}} \mathrm{H}_{\mathrm{g}}^{2} / 2\right) \mathrm{b} \mathrm{A}=\mathrm{b} \Lambda^{2} /\left(\mathrm{N}^{2} \mu_{\mathrm{o}} \mathrm{r} \theta \mathrm{W}\right)\]
\[\mathrm{T}=-\mathrm{d} \mathrm{w}_{\mathrm{g}} / \mathrm{d} \theta=\mathrm{b} \Lambda^{2} /\left(\mathrm{N}^{2} \mu_{\mathrm{o}} \mathrm{r} \mathrm{W} \theta^{2}\right)=\mathrm{r} 2\left(\mu_{\mathrm{o}} \mathrm{H}_{\mathrm{g}}^{2} / 2\right) \mathrm{Wb} \ [\mathrm{Nm}]\]
El par resultante T in (6.3.25) puede interpretarse como producto del radio r y el doble de la fuerza ejercida en el borde de ataque de cada hueco (dos veces, porque hay dos huecos), donde esta fuerza es la presión magnética μ o H g 2 /2 [N m -2] veces el área de brecha Wb proyectada en la dirección del movimiento. Debido a que las líneas del campo magnético son perpendiculares a la dirección de la fuerza, la presión magnética empuja en lugar de tirar, como lo haría si el campo magnético fuera paralelo a la dirección de la fuerza. Desafortunadamente, aumentar la brecha b no aumenta la fuerza, porque debilita a H g proporcionalmente, y por lo tanto debilita T ∝ H 2. En general, b está diseñado para ser mínimo y generalmente está limitado a aproximadamente 25-100 micras por variaciones térmicas y tolerancias de rodamiento y fabricación. El campo magnético en el hueco está limitado por el campo de saturación del material magnético, como se discute en la Sección 2.5.4.
Los circuitos de accionamiento inician la corriente I en el motor de reluctancia de la Figura 6.3.5 cuando el área de separación RθW es mínima, y la terminan cuando esa área se vuelve máxima. El rotor luego costea con I = 0 y par cero hasta que el área vuelve a ser mínima, cuando el ciclo se repite. Las configuraciones que ofrecen par continuo se usan más comúnmente en lugar de hacerlo debido a su rendimiento más suave.
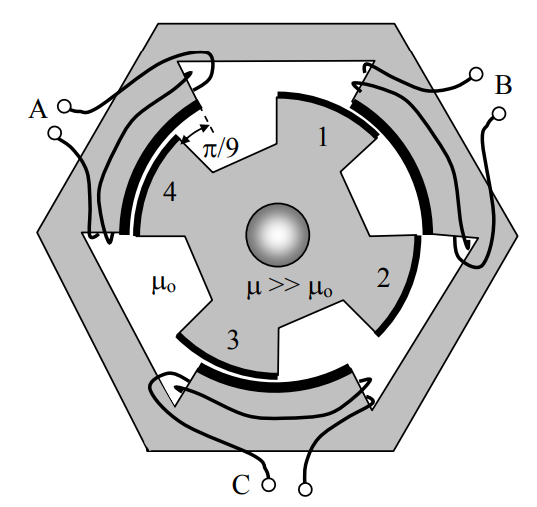
La Figura 6.3.6 ilustra un motor de reluctancia que proporciona par continuo utilizando tres polos de estator (A, B, C) y cuatro polos de rotor (1, 2, 3, 4). Cuando los devanados A y B están excitados, el polo 1 del rotor se tira en el sentido de las agujas del reloj hacia el polo B del estator. El área de separación del polo A del estator es temporalmente constante y no contribuye Después de que el rotor se mueve\(\pi\) /9 radianes, las corrientes se conmutan a los polos B y C para tirar del polo 2 del rotor hacia el polo C del estator, mientras que el polo 1 del rotor no aporta par. A continuación se excitan C y A, y este ciclo de excitación (A/B, B/C, C/A) se repite seis veces por revolución. El par en sentido antihorario se obtiene invirtiendo la secuencia de excitación. Muchas combinaciones de polos son posibles, y aquellos con más polos producen pares más altos porque el par es proporcional al número de polos activos. En este caso solo un polo está proporcionando par a la vez, por lo que el par constante\(\mathrm{T}=\mathrm{bW}\left(\mu_{0} \mathrm{H}_{\mathrm{g}}^{2} / 2\right)\) [N m].
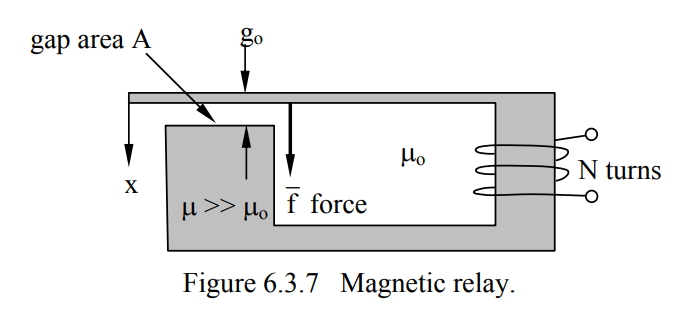
Un cálculo muy similar al anterior también se aplica a relés como el ilustrado en la Figura 6.3.7, donde una bobina magnetiza una barra flexible o articulada, arrastrándola hacia abajo para abrir y/o cerrar uno o más contactos eléctricos.
Podemos encontrar la fuerza f, el enlace de flujo λ y la energía de separación w g usando una bobina de giro N cortocircuitada para hacer λ constante, como antes:
\[\mathrm{f}=-\mathrm{d} \mathrm{w}_{\mathrm{g}} / \mathrm{d} \mathrm{x} \qquad\qquad\qquad \text{(force closing the gap)}\]
\[\Lambda=\mathrm{N} \mu_{\mathrm{o}} \mathrm{H}_{\mathrm{g}} \mathrm{A} \qquad\qquad\qquad \text{(flux linkage)}\]
\[\mathrm{w}_{\mathrm{g}}=\left(\mu_{\mathrm{o}} \mathrm{H}_{\mathrm{g}}^{2} / 2\right) \mathrm{A}\left(\mathrm{g}_{\mathrm{o}}-\mathrm{x}\right)=\left(\mathrm{g}_{\mathrm{o}}-\mathrm{x}\right) \Lambda^{2} /\left(2 \mathrm{N}^{2} \mu_{\mathrm{o}} \mathrm{A}\right)\ [\mathrm J] \qquad\qquad\qquad \text{(gap energy)}\]
\[\mathrm{f}=-\mathrm{d} \mathrm{w}_{\mathrm{g}} / \mathrm{d} \mathrm{x}=\Lambda^{2} /\left(2 \mathrm{N}^{2} \mu_{\mathrm{o}} \mathrm{A}\right)=\left(\mu_{\mathrm{o}} \mathrm{H}_{\mathrm{g}}^{2} / 2\right) \mathrm{A}\ [\mathrm{N}] \qquad\qquad\qquad \text{(force)}\]
Esta fuerza también se puede interpretar como el área de separación A veces una presión magnética P m, donde:
\[P_{m}=\mu_{0} H_{g}^{2} / 2 \ \left[\mathrm{N} / m^{2}\right] \qquad\qquad\qquad \text{(magnetic pressure)}\]
La presión magnética es atractiva paralela a las líneas de campo, tendiendo a cerrar la brecha. Las unidades N/m 2 son idénticas a J/m 3. Tenga en cuenta que el signo menos se usa en (6.3.29) porque f es la fuerza magnética que cierra el hueco, lo que equivale a la fuerza mecánica requerida para sostenerlo separado; el movimiento en la dirección x reduce w g.
Los motores micro-rotativos magnéticos son difíciles de construir sin usar materiales magnéticos o inducción 27 porque es difícil proporcionar contactos eléctricos deslizantes confiables para transportar corrientes al rotor. Una forma de motor magnético rotativo es similar a la de las Figuras 6.2.3 y 6.2.4, excepto que el motor introduce en los huecos segmentados un material giratorio de alta permeabilidad en lugar de un dieléctrico, donde los huecos tendrían altos campos magnéticos inducidos por corrientes estatóricas como las de la Figura 6.3.6. Al igual que en el caso de los motores MEMS dieléctricos rotativos descritos en la Sección 6.2, la sincronización de las corrientes debe estar sincronizada con la posición angular del rotor. La fuerza sobre una losa magnética que se mueve hacia una región de campo magnético fuerte se puede mostrar para aproximarse a\(\mathrm{A} \mu \mathrm{H}_{\mu}^{2} / 2\) [N], donde A es el área de la cara móvil paralela a H μ, que es el campo dentro de la losa móvil, y\(\mu>>\mu_{0}\). El rotor también puede hacerse permanentemente magnético de manera que sea atraído o repelido por los campos de estator conmutados sincrónicamente; los motores de imanes permanentes se discuten más adelante en la Sección 6.5.2.
27 Los motores de inducción, no discutidos en este texto, son impulsados por las fuerzas magnéticas producidas por una combinación de corrientes de rotor y estator, donde las corrientes del rotor son inducidas por los campos magnéticos variables en el tiempo que experimentan, al igual que un transformador. Esto evita la necesidad de contacto eléctrico directo con el rotor.
Un relé como el de la Figura 6.3.7 es accionado por una fuente de corriente I [A] y tiene un hueco de ancho g. ¿Cuál es la fuerza f (g) que actúa para cerrar el hueco? Supongamos que el área de sección transversal A del espacio y el metal es constante alrededor del dispositivo, y tenga en cuenta que la fuerza depende de si el espacio está abierto o cerrado.
Solución
Esta fuerza es la presión\(\mu_{0} \mathrm{H}_{\mathrm{g}}^{2} / 2\) multiplicada por el área A (6.3.29), asumiendo\(\mu>>\mu_{0}\). Dado que\(\nabla \times \overline{\mathrm{H}}=\overline{\mathrm{J}}\), por lo tanto\(\mathrm{NI}=\oint \mathrm{H}(\mathrm{s}) \mathrm{ds}=\mathrm{H}_{\mathrm{g}} \mathrm{g}+\mathrm{H}_{\mu} \mathrm{S}\), donde S es la longitud de la trayectoria alrededor del bucle que tiene permeabilidad μ. Cuando\(\mathrm{H}_{\mathrm{g}} \mathrm{g}>>\mathrm{H}_{\mu} \mathrm{S}\), entonces\(\mathrm{H}_{\mathrm{g}} \cong \mathrm{NI} / \mathrm{g}\) y\(\mathrm{f} \cong \mu_{\mathrm{o}}(\mathrm{NI} / \mathrm{g})^{2} \mathrm{A} / 2\) para el relé abierto. Cuando el relé está cerrado y g 0, entonces\(\mathrm{H}_{\mathrm{g}} \cong \mu \mathrm{H}_{\mathrm{u}} / \mu_{\mathrm{o}}\), donde H μ NI/S; entonces\(\mathrm{f} \cong(\mu \mathrm{NI} / \mathrm{S})^{2} \mathrm{A} / 2 \mu_{\mathrm{o}}\). La relación de fuerzas cuando el relé está cerrado a aquella cuando está abierto es (μg/μ o S) 2, siempre\(\mathrm{H}_{\mathrm{g}} \mathrm{g}>>\mathrm{H}_{\mu} \mathrm{S}\) y esta relación\(>>1\).