
6.6: Sensores eléctricos y magnéticos
- Page ID
- 125827

Sensores electrostáticos MEMS
Los sensores son dispositivos que responden a su entorno. Algunos sensores alteran sus propiedades en función de las propiedades químicas, térmicas, de radiación u otras del ambiente, donde un circuito activo separado sondea estas propiedades. La conductividad, permeabilidad y permitividad de los materiales son típicamente sensibles a múltiples parámetros ambientales. Otros sensores generan directamente voltajes en respuesta al entorno que pueden amplificarse y medirse. Un sensor MEMS común mide pequeños desplazamientos de brazos en voladizo debido a cambios de temperatura, presión, aceleración, química u otros cambios. Por ejemplo, los cambios de temperatura pueden curvar un voladizo delgado debido a diferencias en el coeficiente de expansión térmica a lo largo de su grosor, y las reacciones químicas en la superficie de un voladizo pueden cambiar su masa y frecuencia de resonancia mecánica. Los micrófonos pueden detectar vibraciones en dichos voladizos, o aceleraciones a lo largo de ejes específicos.
La\(\PageIndex{1}\) figura muestra un sensor MEMS capacitivo estándar que ilustra los principios básicos, donde las placas del condensador del área A están separadas por la distancia d, y el voltaje V está determinado en parte por el divisor de voltaje formado por la resistencia de la fuente\(R_s\) y la resistencia de entrada del amplificador R. V s es el voltaje de la fuente.
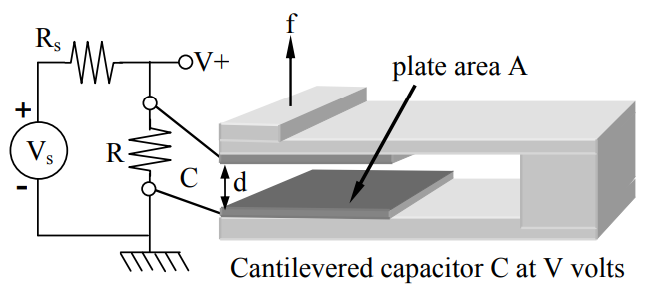
La respuesta instantánea del circuito a un aumento δ en la separación de placas d es un aumento en la tensión del condensador V por encima de su valor de equilibrio normal V e determinado por el divisor de voltaje, donde V e = V s R/ (R+R s). El condensador luego se descarga exponencialmente hacia V e con una constante de tiempo\(\tau\) = (R//R s) C. 29 Consulte la Sección 3.5.1 Sección 3.5.1 para más discusiones sobre el comportamiento del circuito RC. Si\(R_s \gg R\)\(\tau\) entonces RC. Si\(R_s \gg R\) y\(R\) representa la resistencia de entrada de un amplificador de sensor de alto rendimiento, entonces ese sensor puede detectar tan poco como\(\Delta \mathrm{W}_{\mathrm{B}} \cong 10^{-20}\) julios por “bit de información” 30. Esto se puede comparar con el aumento incremental\(Δw_c\) en la energía del condensador debido al desplazamiento a\(δ \ll d\) medida que\(C\) disminuye a\(C'\):
\[\begin{align} \Delta \mathrm{w}_{\mathrm{c}} &= \dfrac{\left(\mathrm{C}-\mathrm{C}^{\prime}\right) \mathrm{V}^{2}}{2} \\[4pt] &= \dfrac{\mathrm{V}^{2} \varepsilon_{\mathrm{o}} \mathrm{A}\left(\mathrm{d}^{-1}-[\mathrm{d}+\delta]^{-1}\right) }{2} \\[4pt] &\cong \dfrac{ \mathrm{V}^{2} \varepsilon_{\mathrm{o}} \mathrm{A} \delta}{ 2 \mathrm{d}^{2}} [\mathrm J] \end{align}\]
Un ejemplo simple ilustra la extrema sensibilidad potencial de dicho sensor. Supongamos que la separación de placas d es de una micra, las placas son de 1 mm cuadradas (A = 10 -6) y V = 300. Entonces el mínimo detectable\(δ\) dado por la Ecuación\ ref {6.6.1} para\(\Delta \mathrm{w}_{\mathrm{c}}=\Delta \mathrm{w}_{\mathrm{B}}=10^{-20}\) Julios es:
\[\begin{align} \delta_{\min } &=\Delta w_{\mathrm{B}} \times 2 \mathrm{d}^{2} / \mathrm{V}^{2} \varepsilon_{\mathrm{o}} \mathrm{A} \\[4pt] &\cong 10^{-20} 2\left(10^{-6}\right)^{2} /\left(300^{2} \times 8.8 \times 10^{-12} \times 10^{-6}\right) \\ & \cong 2 \times 10^{-20} \ [\mathrm{m}] \label{6.6.1} \end{align}\]
En este nivel potencial de sensibilidad estamos limitados en cambio por el ruido térmico y mecánico debido al movimiento browniano de las moléculas de aire y los electrones de conducción. Un conjunto más práctico de parámetros podría involucrar un detector menos sensible (ΔB 10 -14) y voltajes más bajos (V 5); luego δ min 10 -10 metros 1 angstrom (muy aproximadamente un diámetro atómico). El rango dinámico de tal sensor sería enormemente mayor, por supuesto. Esta sensibilidad de un angstrom es comparable a la del tímpano humano a ~1kHz.
29 La resistencia\(R\) de dos resistencias en paralelo es\(\mathrm{R}=\left(\mathrm{R}_{\mathrm{a}} \| \mathrm{R}_{\mathrm{b}}\right)=\mathrm{R}_{\mathrm{a}} \mathrm{R}_{\mathrm{b}} /\left(\mathrm{R}_{\mathrm{a}}+\mathrm{R}_{\mathrm{b}}\right)\).
30 La mayoría de los buenos sistemas de comunicaciones pueden operar con probabilidades aceptables de error si E b /N o >~10, donde E b es la energía por bit y N o = kT es la densidad de potencia de ruido [W Hz -1] = [J]. Un poco es una sola pieza de información sí-no. La constante de Boltzmann k 1.38×10 -23 [J o K -1], y T es la temperatura del ruido del sistema, que podría aproximarse a 100K en un buen sistema a frecuencias de RF. Por lo tanto, la energía mínima requerida para detectar cada bit de información es ~10N o = 10 kT 10 -20 [J].
Una alternativa a tales observaciones de transitorios de voltaje del sensor MEMS es observar cambios en la frecuencia resonante de un resonador LC que incluye la capacitancia del sensor; este enfoque puede reducir los efectos de la interferencia de baja frecuencia.
Sensores MEMS magnéticos
Los sensores magnéticos microscópicos son menos comunes que los electrostáticos debido a la dificultad de proporcionar fuertes campos magnéticos confiables y económicos a escalas microscópicas. Los campos magnéticos altos requieren altas corrientes o imanes permanentes fuertes. Sin embargo, si tales campos están presentes, el movimiento mecánico de un cable de sonda o voladizo a través de las líneas del campo magnético podría producir voltajes fluctuantes, como se indica en (6.1.4).
Sensores de Efecto Hall
Los sensores de efecto Hall son dispositivos semiconductores que producen un voltaje de salida V Hall proporcional al campo magnético\(\overline{\mathrm{H}}\), donde el voltaje se produce como resultado de las fuerzas magnéticas en los portadores de carga que se mueven a velocidad\(\overline{\mathrm{v}}\) dentro del semiconductor. Pueden medir campos magnéticos o, si se conoce el campo magnético, pueden determinar la velocidad promedio y el tipo (agujero o electrón) de los portadores de carga que transportan la corriente. Una configuración típica aparece en la Figura\(\PageIndex{2}\), para la cual el voltaje de efecto Hall\(V_{Hall}\) es proporcional a la corriente\(I\) y al campo magnético perpendicular\(\overline{\mathrm{H}}\).

El funcionamiento de un sensor de efecto Hall se deriva directamente de la ley de fuerza de Lorentz:
\[\overline{\mathrm{f}}=\mathrm{q}\left(\overline{\mathrm{E}}+\overline{\mathrm{v}} \times \mu_{\mathrm{o}} \overline{\mathrm{H}}\right)\ [\text { Newtons }]\]
Los portadores cargados positivamente que se mueven a velocidad\(\overline{\mathrm{v}}\) serían forzados hacia abajo\(\overline{\mathrm{f}}\), como se muestra en la figura, donde se acumularían hasta que el campo eléctrico resultante\(\overline{\mathrm{E}}\) proporcionara una fuerza de equilibrio Qe suficientemente fuerte en la dirección opuesta para producir equilibrio. En equilibrio la fuerza neta y el lado derecho de (6.6.3) deben ser cero, así\(\overline{\mathrm{E}}=-\overline{\mathrm{v}} \times \mu_{\mathrm{o}} \overline{\mathrm{H}}\) y el resultante\(V_{Hall}\) es:
\[\mathrm{V}_{\text {Hall }}=\hat{x} \bullet \overline{\mathrm{E}} \mathrm{W}=\mathrm{v} \mu_{\mathrm{o}} \mathrm{HW} \ [\mathrm{V}]\]
Para velocidades portadoras de carga de 30 m s -1 y campos μ o H de 0.1 Tesla, V Hall sería de 3 milivoltios a través de un ancho W de un milímetro, lo que se detecta fácilmente.
Si los portadores de carga son electrones así q < 0, entonces se invierte el signo de la tensión Hall. Dado que el voltaje depende de la velocidad v de los portadores más que de su número, su densidad numérica promedio N [m -1] se puede determinar usando I = Nqv. Es decir, para los portadores positivos:
\[\mathrm{v}=\mathrm{V}_{\mathrm{H}} / \mathrm{W} \mu_{\mathrm{o}} \mathrm{H} \ \left[\mathrm{ms}^{-1}\right]\]
\[\mathrm{N}=\mathrm{I} / \mathrm{qv}\]
Por lo tanto, el efecto Hall es útil para entender el comportamiento del portador (N, v) en función de la composición de semiconductores.