
5.2: Rotación de Cuerpo Rígido
- Page ID
- 129792

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
4.2.1 Cinemática
Cuando un objeto rígido gira, cada parte de él (cada átomo) se mueve en un círculo, cubriendo el mismo ángulo en la misma cantidad de tiempo, a. Cada átomo tiene un vector de velocidad diferente, b. Dado que todas las velocidades son diferentes, no podemos medir la velocidad de rotación de la parte superior dando una sola velocidad. Sin embargo, podemos especificar su velocidad de rotación de manera consistente en términos de ángulo por unidad de tiempo. Que la posición de algún punto de referencia en la parte superior se denote por su ángulo\(\theta\), medido en círculo alrededor del eje. Por razones que pronto se harán más evidentes, medimos todos nuestros ángulos en radianes. Entonces el cambio en la posición angular de cualquier punto en la parte superior se puede escribir como\(d\theta\), y todas las partes de la parte superior tienen el mismo valor de\(d\theta\) durante un cierto intervalo de tiempo\(dt\). Definimos la velocidad angular,\(\omega\) (omega griega),
que es similar a, pero no lo mismo que, la cantidad\(\omega\) que definimos anteriormente para describir las vibraciones. La relación entre\(\omega\) y\(t\) es exactamente análoga a la que existe entre\(x\) y\(t\) para el movimiento de una partícula a través del espacio.
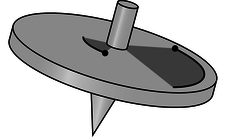

Figura 4.2.1: (izquierda) los dos átomos cubren el mismo ángulo en un intervalo de tiempo dado. (derecha) Sus vectores de velocidad, sin embargo, difieren tanto en magnitud como en dirección.
Ejercicio\(\PageIndex{1}\)
Si dos personas diferentes escogieran dos puntos de referencia diferentes en la parte superior para definir\(\theta\text{=0}\), ¿en qué se diferenciarían sus\(\theta\)\(t\) gráficos? ¿Qué efecto tendría esto en las velocidades angulares?
(respuesta en la parte posterior de la versión PDF del libro)
La velocidad angular tiene unidades de radianes por segundo, rad/s, sin embargo, los radianes no son realmente unidades. Se define la medida radianes de un ángulo, como la longitud del arco circular que realiza, dividida por el radio del círculo. Dividir una longitud por otra da una cantidad sin unidades, así que cualquier cosa con unidades de radianes es realmente sin unidades. Por lo tanto, podemos simplificar las unidades de velocidad angular, y llamarlas segundos inversos,\(\text{s}^{-1}\).
Ejemplo\(\PageIndex{1}\): A 78-rpm record
\(\triangleright\)A principios del siglo XX, el formato estándar para las grabaciones musicales era un disco de plástico que sostenía una sola canción y giraba a 78 rpm (revoluciones por minuto). ¿Cuál era la velocidad angular de tal disco?
\(\triangleright\)Si medimos ángulos en unidades de revoluciones y tiempo en unidades de minutos, entonces 78 rpm es la velocidad angular. Usando unidades de física estándar de radianes/segundo, sin embargo, tenemos
En ausencia de cualquier par, un cuerpo rígido girará indefinidamente con la misma velocidad angular. Si la velocidad angular está cambiando debido a un par, definimos una aceleración angular,
El símbolo es la letra griega alfa. Las unidades de esta cantidad son\(\text{rad}/\text{s}^2\), o simplemente\(\text{s}^{-2}\).
La relación matemática entre\(\omega\) y\(\theta\) es la misma que la que existe entre\(v\) y\(x\), y de manera similar para\(\alpha\) y\(a\). Podemos así hacer un sistema de analogías, c, y reciclar todas las ecuaciones cinemáticas familiares para el movimiento de aceleración constante.
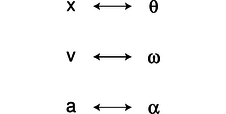
Figura 4.2.2: Analogías entre cantidades rotacionales y lineales.
Ejemplo\(\PageIndex{2}\): The synodic period
Marte tarda casi el doble de tiempo que la Tierra en completar una órbita. Si los dos planetas están uno al lado del otro en un día determinado, entonces un año después, la Tierra volverá al mismo lugar, pero Marte habrá avanzado, y la Tierra tardará más tiempo en ponerse al día. Las velocidades angulares suman y restan, tal como lo hacen los vectores de velocidad. Si las velocidades angulares de los dos planetas son\(\omega_1\) y\(\omega_2\), entonces la velocidad angular de uno con respecto al otro es\(\omega_1-\omega_2\). El periodo correspondiente,\(1/(1/T_1-1/T_2)\) se conoce como periodo sinódico.
Ejemplo\(\PageIndex{3}\): A neutron star
\(\triangleright\)Inicialmente se observa que una estrella de neutrones gira con una velocidad angular de\( 2.0\ \text{s}^{-1}\), determinada a través de los pulsos de radio que emite. Si su aceleración angular es una constante\(- 1.0\times10^{-8}\ \text{s}^{-2}\), ¿cuántas rotaciones completará antes de que se detenga? (En realidad, la aceleración angular no siempre es constante; a menudo ocurren cambios repentinos, y se les conoce como “¡stemblores estelares!”)
\(\triangleright\)La ecuación\(v_{f}^2- v_{i}^2\text{=2} a\Delta x\) puede traducirse en\(\omega_{f}^2-\omega_i^2\text{=2}\alpha\Delta\theta\), dando
4.2.2 Relaciones entre cantidades angulares y movimiento de un punto
A menudo es necesario poder relacionar las cantidades angulares con el movimiento de un punto particular en el objeto giratorio. A medida que desarrollemos estos, nos encontraremos con el primer ejemplo donde se hacen evidentes las ventajas de los radianes sobre los grados.

Figura 4.2.3: Construimos un sistema de coordenadas que coincide con la ubicación y el movimiento del punto de interés móvil en un momento determinado.
La velocidad a la que se mueve un punto del objeto depende tanto de la velocidad\(\omega\) angular del objeto como de la\(r\) distancia del punto al eje. Adoptamos un sistema de coordenadas, d, con un eje interior (radial) y un eje tangencial. La longitud del arco circular infinitesimal\(ds\) recorrido por el punto en un intervalo de tiempo\(dt\) se relaciona\(d\theta\) con la definición de medida radianes\(d\theta=ds/r\), donde los valores positivos y negativos de\(ds\) representan las dos posibles direcciones de movimiento a lo largo del eje tangencial. Entonces tenemos\(v_t = ds/dt = rd\theta/dt = \omega r\), o
\[ v_t = \omega r \]
El componente radial es cero, ya que el punto no se mueve hacia adentro ni hacia afuera,
\[v_r = 0 \]
Obsérvese que tuvimos que usar la definición de medida radianes en esta derivación. Supongamos que en cambio habíamos usado unidades de grados para nuestros ángulos y grados por segundo para velocidades angulares. La relación entre\(d\theta_{degrees}\) y\(ds\) es\(d\theta_{degrees} = (360/2\pi)s/r\), donde el factor de conversión extra de\((360/2\pi)\) proviene de ese hecho de que hay 360 grados en un círculo completo, lo que equivale a\(2\pi\) radianes. La ecuación para entonces\(v_t\) habría sido\(v_t = (2\pi/360)(\omega_{degrees\ per\ second})(r)\), que habría sido mucho más desordenada. La simplicidad, entonces, es la razón para usar radianes en lugar de grados; al usar radianes evitamos infectar todas nuestras ecuaciones con molestos factores de conversión.
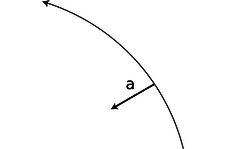
Figura 4.2.4: Incluso si el objeto giratorio tiene aceleración angular cero, cada punto en él tiene una aceleración hacia el centro.
Dado que la velocidad de un punto en el objeto es directamente proporcional a la velocidad angular, es de esperar que su aceleración sea directamente proporcional a la aceleración angular. Esto no es cierto, sin embargo. Incluso si la aceleración angular es cero, es decir, si el objeto está girando a velocidad angular constante, cada punto en él tendrá un vector de aceleración dirigido hacia el eje, e. Según se deriva en la página 209, la magnitud de esta aceleración es
\[ \text{radial acceleration of a point at a distance $r$ from the axis} \]
Para el componente tangencial, cualquier cambio en la velocidad angular\(d\omega\) conducirá a un cambio\(d\omega\cdot r\) en la velocidad tangencial, por lo que se demuestra fácilmente que
\[ a_t = \alpha r .\]
Ejercicio\(\PageIndex{2}\)
Los signos positivos y negativos de\(\omega\) representan la rotación en direcciones opuestas. Por lo tanto, ¿por qué tiene sentido físicamente que\(\omega\) se eleve al primer poder en la ecuación para\(v_t\) y al segundo poder en el uno para\(a_r\)?
(respuesta en la parte posterior de la versión PDF del libro)
Ejemplo\(\PageIndex{3}\): Radial acceleration at the surface of the Earth
\(\triangleright\)¿Cuál es tu aceleración radial debido a la rotación de la tierra si estás en el ecuador?
\(\triangleright\)En el ecuador, su distancia del eje de rotación de la Tierra es la misma que el radio de la Tierra esférica,\( 6.4\times10^6\ \text{m}\). Tu velocidad angular es
lo que da una aceleración de
La velocidad angular era un número muy pequeño, pero el radio era un número muy grande. Al cuadrar un número muy pequeño, sin embargo, da un número muy muy pequeño, por lo que el\(\omega^2\) factor “gana”, y el resultado final es pequeño.
Si estás parado en una báscula de baño, esta pequeña aceleración la proporciona el desequilibrio entre la fuerza descendente de la gravedad y la fuerza normal ascendente ligeramente más débil de la báscula en tu pie. Por lo tanto, la lectura de la escala es un poco menor de lo que debería ser.
4.2.3 Dinámica
Si queremos conectar toda esta cinemática a algo dinámico, necesitamos ver cómo se relaciona con el torque y el momento angular. Nuestra estrategia será abordar primero el momento angular, ya que el momento angular se relaciona con el movimiento, y usar la propiedad aditiva del momento angular: el momento angular de un sistema de partículas equivale a la suma de los momentos angulares de todas las partículas individuales. El momento angular de una partícula dentro de nuestro objeto rígidamente giratorio\(L=mv_\perp r\),, se puede reescribir como\(L=r\:p\:\sin\:\theta\), dónde\(r\) y\(p\) son las magnitudes de los vectores de partícula\(\mathbf{r}\) y momento, y\(\theta\) es el ángulo entre estos dos vectores. (El vector r apunta hacia afuera perpendicularmente desde el eje hasta la posición de la partícula en el espacio). En rotación de cuerpo rígido el ángulo\(\theta\) es de 90°, así que simplemente tenemos\(L=r p\). Relacionando esto con la velocidad angular, tenemos
\[L=rp=(r)(mv)=(r)(m\omega r)=mr^2\omega.\]
La contribución de la partícula al momento angular total es proporcional a\(\omega\), con una constante de proporcionalidad\(mr^2\). Nos referimos\(mr^2\) como la contribución de la partícula al momento total de inercia del objeto\(I\), donde el “momento” se usa en el sentido de “importante”, como en “trascendental”, un valor mayor de nos\(I\) dice que la partícula es más importante para determinar el momento angular total. El momento total de inercia es
El momento angular de un cuerpo que gira rígidamente es entonces
Dado que el par se define como\(dL/dt\), y un cuerpo rígido tiene un momento constante de inercia, tenemos\(\tau=dL/dt =Id\omega/dt=I\alpha\),
que es análogo a\(F=ma\).
El sistema completo de analogías entre el movimiento lineal y la rotación de cuerpo rígido se da en la figura f.
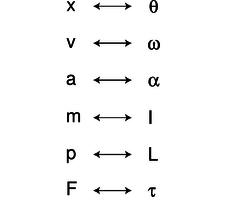
Figura 4.2.5: Analogías entre cantidades rotacionales y lineales.
Ejemplo\(\PageIndex{3}\): A barbell

g/Ejemplo 15
\(\triangleright\)La barra que se muestra en la figura g consiste en dos bolas pequeñas, densas y masivas en los extremos de una varilla muy ligera. Las bolas tienen masas de 2.0 kg y 1.0 kg, y la longitud de la varilla es de 3.0 m. Encuentra el momento de inercia de la varilla (1) para rotación alrededor de su centro de masa, y (2) para rotación alrededor del centro de la bola más masiva.
\(\triangleright\)(1) El centro de masa de la pelota se encuentra 1/3 del camino de la masa mayor a la masa menor, es decir, 1.0 m de una y 2.0 m de la otra. Como las bolas son pequeñas, las aproximamos como si fueran dos partículas puntiagudas. El momento de inercia es
Quizás de manera contraintuitiva, la pelota menos masiva contribuye mucho más al momento de inercia.
(2) La bola grande teóricamente contribuye un poco al momento de inercia, ya que esencialmente ninguno de sus átomos está exactamente en\(r\) =0. No obstante, dado que se dice que las bolas son pequeñas y densas, asumimos que todos los átomos de la bola grande están tan cerca del eje que podemos ignorar sus pequeñas contribuciones al momento total de inercia:
Este ejemplo muestra que el momento de inercia depende de la elección del eje. Por ejemplo, es más fácil mover un bolígrafo alrededor de su centro que alrededor de un extremo.
| Ejemplo 16: El teorema del eje paralelo |
|---|
| \(\triangleright\)Generalizando el ejemplo anterior, supongamos que escogemos cualquier eje paralelo al eje 1, pero desviado de él por una distancia\(h\). La parte (2) del ejemplo anterior corresponde entonces al caso especial de\(h=- 1.0\ \text{m}\) (siendo negativo a la izquierda). ¿Cuál es el momento de inercia sobre este nuevo eje? \(\triangleright\)La distancia de la pelota grande con respecto al nuevo eje es\(\text{(1.0\ m)+} h\), y la pequeña es\(\text{(2.0\ m)-} h\). El nuevo momento de inercia es \[\begin{align*} I &= \text{(2.0 kg)}[\text{(1.0 m)+} h]^2 + \text{(1.0 kg)}[\text{(2.0 m)}- h]^2 \\ & = 6.0 \ \text{kg}\!\cdot\!\text{m}^2 + \text{(4.0}\ \text{kg}\!\cdot\!\text{m}) h - \text{(4.0}\ \text{kg}\!\cdot\!\text{m}) h + \text{(3.0 kg)} h^2 . \end{align*}\] El término constante es el mismo que el momento de inercia sobre el eje del centro de masa, los términos de primer orden se cancelan, y el tercer término es solo la masa total multiplicada por\(h^2\). El lector interesado no tendrá dificultad en generalizar esto a cualquier conjunto de partículas (problema 38, p. 294), dando como resultado el teorema del eje paralelo: Si un objeto de masa total\(M\) gira alrededor de una línea a una\(h\) distancia de su centro de masa, entonces su momento de inercia es igual \(I_{cm}+ Mh^2\), donde\(I_{cm}\) es el momento de inercia para la rotación alrededor de una línea paralela a través del centro de masa. |
| Ejemplo 17: Escalado del momento de inercia |
|---|
| \(\triangleright\)(1) Supongamos que dos objetos tienen la misma masa y la misma forma, pero uno es menos denso y más grande por un factor\(k\). ¿Cómo se comparan sus momentos de inercia? \(\triangleright\)(1) Esto es como aumentar todas las distancias entre átomos por un factor\(k\). Todos los\(r\)'s se hacen mayores por este factor, por lo que el momento de inercia se incrementa en un factor de\(k^2\). |
4.2.4 Integrales iteradas
En varios lugares de este libro, comenzando con la subsección 4.2.5, nos encontraremos con integrales atrapadas dentro de otras integrales. Estas se conocen como integrales iteradas, o integrales dobles, integrales triples, etc. Conceptos similares surgen todo el tiempo incluso cuando no estás haciendo cálculo, así que comencemos imaginando tal ejemplo. Supongamos que quieres contar cuántas casillas hay en un tablero de ajedrez, y no sabes cómo multiplicar ocho por ocho. Podrías comenzar desde la parte superior izquierda, contar ocho cuadrados de ancho, luego continuar con la segunda fila, y así sucesivamente, hasta que como contaste cada cuadrado, dando el resultado de 64. En lenguaje matemático un poco más formal, podríamos escribir la siguiente receta: para cada fila\(r\), de 1 a 8, considerar las columnas\(c\),, de 1 a 8, y agregar una al conteo para cada una de ellas. Usando la notación sigma, esto se convierte en
Si estás familiarizado con la programación de computadoras, entonces puedes pensar en esto como una suma que podría calcularse usando un bucle anidado dentro de otro bucle. Para evaluar el resultado (de nuevo, asumiendo que no sabemos cómo multiplicar, entonces tenemos que usar la fuerza bruta), primero podemos evaluar la suma interna, que equivale a 8, dando
Observe cómo\(c\) ha desaparecido la variable “ficticio”. Finalmente hacemos la suma externa, sobre\(r\), y encontramos el resultado de 64.
Ahora imagina hacer lo mismo con los píxeles en una pantalla de TV. El haz de electrones barre a través de la pantalla, pintando los píxeles en cada fila, uno a la vez. Esto realmente no es diferente al ejemplo del tablero de ajedrez, pero debido a que los píxeles son tan pequeños, normalmente piensas en la imagen en una pantalla de TV como continua en lugar de discreta. Esta es la idea de una integral en el cálculo. Supongamos que queremos encontrar el área de un rectángulo de ancho\(a\) y alto\(b\), y no sabemos que podemos simplemente multiplicar para obtener el área\(ab\). La forma de la fuerza bruta para hacer esto es romper el rectángulo en una cuadrícula de cuadrados infinitesimalmente pequeños, cada uno con ancho\(dx\) y alto\(dy\), y por lo tanto el área infinitesimal\(dA = dx dy\). Para mayor comodidad, imaginaremos que la esquina inferior izquierda del rectángulo está en el origen. Entonces el área está dada por esta integral:
Observe cómo el signo integral más a la izquierda, sobre\(y\), y el diferencial más derecho,\(dy\), actúan como sujetalibros, o los trozos de pan en un sándwich. Dentro de ellos, tenemos el signo integral que atropella\(x\), y el diferencial\(dx\) que lo empareja a la derecha. Finalmente, en la capa más interna, normalmente tendríamos lo que estamos integrando, pero aquí está el 1, así que lo he omitido. Escribir los límites inferiores de las integrales con\(x=\) y\(y=\) ayuda a mantenerlo recto que integral va con diferencial. El resultado es
| Ejemplo 18: Área de un triángulo |
|---|
| \(\triangleright\)Encuentra el área de un triángulo rectángulo 45-45-90 con patas\(a\). \(\triangleright\)Deja que la hipotenusa del triángulo corra desde el origen hasta el punto\((a,a)\), y deja que sus patas corran desde el origen hasta\((0,a)\), y luego hacia\((a,a)\). En otras palabras, el triángulo se asienta encima de su hipotenusa. Entonces la integral se puede configurar de la misma manera que la anterior, pero para un valor particular de\(y\), valores de\(x\) solo correr de 0 (en el\(y\) eje) a\(y\) (en la hipotenusa). Entonces tenemos \[\begin{align*} \text{area} &= \int_{y=0}^a \int_{x=0}^y dA \\ &= \int_{y=0}^a \int_{x=0}^y dx dy \\ &= \int_{y=0}^a \left(\int_{x=0}^y dx\right) dy \\ &= \int_{y=0}^a y dy \\ &= \frac{1}{2}a^2 \end{align*}\] Tenga en cuenta que en este ejemplo, debido a que el extremo superior de\(x\) los valores depende del valor de\(y\), hace una diferencia en qué orden hacemos las integrales. La\(x\) integral tiene que estar por dentro, y tenemos que hacerlo primero. |
| Ejemplo 19: Volumen de un cubo |
|---|
| \(\triangleright\)Encuentra el volumen de un cubo con lados de longitud\(a\). \(\triangleright\)Este es un ejemplo tridimensional, así que tendremos integrales anidadas tres profundas, y lo que estamos integrando es el volumen\(dV = dx dy dz\). \[\begin{align*} \text{volume} &= \int_{z=0}^a \int_{y=0}^a \int_{x=0}^a dx dy dz \\ &= \int_{z=0}^a \int_{y=0}^a a dy dz \\ &= a \int_{z=0}^a \int_{y=0}^a dy dz \\ &= a \int_{z=0}^a a dz \\ &= a^3 \end{align*}\] |
| Ejemplo 20: Área de un círculo |
|---|
| \(\triangleright\)Encuentra el área de un círculo. \(\triangleright\)Para que sea fácil, busquemos el área de un semicírculo y luego doblémosla. Sea el radio del círculo\(r\), y que esté centrado en el origen y delimitado por debajo por el\(x\) eje. Entonces el borde curvo viene dado por la ecuación\(r^2=x^2+y^2\), o\(y=\sqrt{r^2-x^2}\). Dado que el límite de la\(y\) integral depende\(x\), la\(x\) integral tiene que estar en el exterior. El área es \[\begin{align*} \text{area} &= \int_{x=-r}^r \int_{y=0}^{\sqrt{r^2-x^2}} dy dx\\ &= \int_{x=-r}^r \sqrt{r^2-x^2} dx\\ &= r \int_{x=-r}^r \sqrt{1-(x/r)^2} dx . \\ \text{Substituting $u=x/r$,} \\ \text{area} = r^2 \int_{u=-1}^1 \sqrt{1-u^2} du \\ \end{align*}\] La integral definida es igual\(\pi\), como puedes encontrar usando una sustitución trigonométrica o simplemente buscándolo en una tabla, y el resultado es, como se esperaba,\(\pi r^2/2\) para el área del semicírculo. |
4.2.5 Encontrar momentos de inercia por integración
Al calcular el momento de inercia de un objeto de tamaño ordinario con quizás\(10^{26}\) átomos, sería imposible hacer una suma real sobre los átomos, incluso con la supercomputadora más rápida del mundo. El cálculo, sin embargo, ofrece una herramienta, la integral, para dividir una suma en infinitamente muchas partes pequeñas. Si no nos preocupamos por la existencia de átomos, entonces podemos usar una integral para calcular un momento de inercia como si el objeto fuera suave y continuo en todo momento, en lugar de granular a nivel atómico. Por supuesto, esta granularidad típicamente tiene un efecto insignificante sobre el resultado a menos que el objeto sea en sí mismo una molécula individual. Esta subsección consta de tres ejemplos de cómo hacer tal cálculo, en tres niveles distintos de complicación matemática.
Momento de inercia de una varilla delgada
¿Cuál es el momento de inercia de una varilla delgada de masa\(M\) y longitud\(L\) alrededor de una línea perpendicular a la varilla y que pasa por su centro? Generalizamos la suma discreta
En este ejemplo el objeto era unidimensional, lo que simplificaba la matemática. El siguiente ejemplo muestra una estrategia que se puede utilizar para simplificar la matemática para objetos que son tridimensionales, pero que poseen algún tipo de simetría.
Momento de inercia de un disco
¿Cuál es el momento de inercia de un disco de radio\(b\), grosor\(t\) y masa\(M\), para la rotación alrededor de su eje central?
Rompemos el disco en anillos circulares concéntricos de espesor\(dr\). Dado que toda la masa en una rebanada circular dada tiene esencialmente el mismo valor de\(r\) (que va solo de\(r\) a\(r+dr\)), la contribución de la rebanada al momento total de inercia es simplemente\(r^2dm\). Entonces tenemos
donde\(V=\pi b^2 t\) es el volumen total,\(\rho=M/V=M/\pi b^2 t\) es la densidad, y el volumen de una rebanada se puede calcular como el volumen encerrado por su superficie exterior menos el volumen encerrado por su superficie interna,\(dV= \pi (r+dr)^2 t - \pi r^2 t = 2\pi tr dr\).
En el caso más general donde no hay simetría alrededor del eje de rotación, debemos usar integrales iteradas, como se discute en la subsección 4.2.4. El ejemplo del disco poseía dos tipos de simetría con respecto al eje de rotación: (1) el disco es el mismo cuando se gira en cualquier ángulo alrededor del eje, y (2) todos los cortes perpendiculares al eje son los mismos. Estas dos simetrías redujeron el número de capas de integrales de tres a uno. El siguiente ejemplo posee una sola simetría, de tipo (2), y simplemente lo configuramos como una triple integral. Puede que aún no hayas visto múltiples integrales en un curso de matemáticas. Si es así, sólo hojea este ejemplo.
Momento de inercia de un cubo
¿Cuál es el momento de inercia de un cubo de lado\(b\), para la rotación alrededor de un eje que pasa por su centro y es paralelo a cuatro de sus caras? Deja que el origen esté en el centro del cubo, y deja que\(x\) sea el eje de rotación.
El hecho de que el último paso sea una integral trivial resulta de la simetría del problema. El integrando de la doble integral restante se descompone en dos términos, cada uno de los cuales depende solo de una de las variables, por lo que la dividimos en dos integrales,
que sabemos tienen resultados idénticos. Por lo tanto, solo necesitamos evaluar uno de ellos y duplicar el resultado:
La Figura h muestra los momentos de inercia de algunas formas, las cuales fueron evaluadas con técnicas como estas.

h/Momentos de inercia de algunas formas geométricas.
Ejemplo\(\PageIndex{9}\): The hammer throw
\(\triangleright\)En el lanzamiento de martillo olímpico masculino, una bola de acero de radio 6.1 cm se balancea sobre el extremo de un alambre de longitud 1.22 m. ¿Qué fracción del momento angular de la bola proviene de su rotación, a diferencia de su movimiento a través del espacio?
\(\triangleright\)Siempre es importante resolver los problemas simbólicamente primero, y enchufar los números solo al final, así que deja que el radio de la bola sea\(b\), y la longitud del cable\(\ell\). Si el tiempo que tarda la pelota en ir una vez alrededor del círculo es\(T\), entonces este es también el tiempo que lleva girar una vez alrededor de su propio eje. Su velocidad es\(v=2\pi\ell/T\), por lo que su momento angular debido a su movimiento a través del espacio lo es\(mv\ell=2\pi m\ell^2/T\). Su momento angular debido a su rotación alrededor de su propio centro es\((4\pi/5)mb^2/T\). La relación de estos dos momentos angulares es\((2/5)(b/\ell)^2=1.0\times10^{-3}\). El momento angular debido al giro de la pelota es extremadamente pequeño.
Ejemplo\(\PageIndex{10}\): Toppling a rod
\(\triangleright\)Una varilla de longitud\(b\) y masa\(m\) se mantiene erguida. Queremos golpear la varilla en la parte inferior, haciendo que caiga y aterrice plana. Encontrar el impulso,\(p\), que se debe entregar, en términos de\(m\)\(b\), y\(g\). ¿Esto realmente se puede hacer sin que la varilla se raspe en el piso?
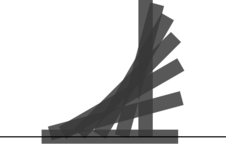
i/Ejemplo 22.
\(\triangleright\)Este es un buen ejemplo de una pregunta que casi se puede responder basándose únicamente en unidades. Dado que las tres variables\(m\),\(b\),\(g\), y, todas tienen unidades diferentes, no se pueden sumar ni restar. La única manera de combinarlos matemáticamente es por multiplicación o división. Multiplicar uno de ellos por sí mismo es exponenciación, por lo que en general esperamos que la respuesta sea de la forma
donde\(A\)\(j\),\(k\), y\(l\) son constantes sin unidades. El resultado tiene que tener unidades de\(\text{kg}\!\cdot\!\text{m}/\text{s}\). Para llevar kilogramos a la primera potencia, necesitamos
metros a la primera potencia requiere
y segundos al poder\(-1\) implica
Encontramos\(j=1\),\(k=1/2\), y\(l=1/2\), entonces la solución debe ser de la forma
¡Tenga en cuenta que no se requirió física!
La consideración de unidades, sin embargo, no nos ayudará a encontrar la constante sin unidades\(A\). \(t\)Sea el tiempo que tarda la vara en caer, así que eso\((1/2)gt^2=b/2\). Si la varilla va a aterrizar exactamente de lado, entonces el número de revoluciones que completa mientras está en el aire debe ser 1/4, o 3/4, o 5/4,..., pero todas las posibilidades mayores a 1/4 provocarían que la cabeza de la varilla chocara prematuramente con el piso. Por lo tanto, la varilla debe girar a una velocidad que haga que complete una rotación completa en un tiempo\(T=4t\), y tenga un momento angular\(L=(\pi/6)mb^2/T\).
El impulso perdido por el objeto que golpea la varilla es\(p\), y por la conservación del impulso, esta es la cantidad de impulso, en la dirección horizontal, que adquiere la varilla. Es decir, la caña volará un poco hacia adelante. Sin embargo, esto no tiene ningún efecto en la solución al problema. Más importante aún, el objeto que choca con la varilla pierde impulso angular\(bp/2\), que también se transfiere a la varilla. Equiparando esto a la expresión anterior para\(L\), encontramos\(p=(\pi/12)m\sqrt{bg}\).
Por último, necesitamos saber si esto realmente se puede hacer sin que el pie de la varilla se raspe en el piso. La figura muestra que la respuesta es no para esta varilla de ancho finito, pero parece que la respuesta sería sí para una varilla suficientemente delgada. Esto se analiza más a fondo en el problema de tarea 37 en la página 294.
Colaboradores