
6.2: Soluciones reales a la ecuación de onda
- Page ID
- 126088

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Primero consideramos soluciones reales a la ecuación de onda. Una familia de soluciones son ondas viajeras de la forma\[f(x,t) = f_0 \, \cos\!\big(kx - \omega t + \phi\big),\quad\mathrm{where}\;\, \left|\frac{\omega}{k}\right| = v. \label{realsol}\] Por sustitución directa, podemos verificar que esto satisface la PDE. Llamamos a\(f_0\) la amplitud de la onda,\(\phi\) la fase,\(\omega\) la frecuencia (angular) y\(k\) el número de onda. Por convención,\(\omega\) se toma como un número real positivo. Sin embargo,\(k\) puede ser positivo o negativo, y su signo determina la dirección de propagación de la onda; la magnitud del número de onda está inversamente relacionada con la longitud de onda\(\lambda\) por\(\lambda = 2\pi/|k|\).
A\(t\) medida que aumenta, la onda se mueve hacia la derecha si\(k\) es positiva, mientras que se mueve hacia la izquierda si\(k\) es negativa. Aquí hay una manera de razonar por qué este es el caso. Considera introducir un pequeño cambio en el tiempo\(\delta t\),, en la función\(\cos(kx - \omega t + \phi)\). Si, junto con este cambio de tiempo, cambiamos\(x\) por\(\delta x = (\omega/k)\, \delta t\), entonces el cambio en el\(kx\) término y el cambio en el\(\omega t\) término cancelan, dejando el valor del coseno sin cambios:
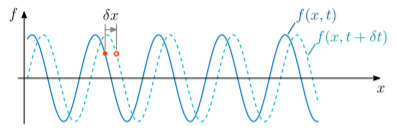
Esto implica que la onda cambia\(\delta x = (\omega/k)\, \delta t\) durante el intervalo de tiempo\(\delta t\). De ahí que la velocidad de onda sea\[\textrm{velocity} = \frac{\delta x}{\delta t} = \frac{(\omega/k)\,\delta t}{\delta t} = \frac{\omega}{k}.\] Como\(\omega\) se señaló anteriormente, convencionalmente se toma como un número real positivo. Por lo tanto, positivo\(k\) implica que la onda se mueve hacia la derecha (velocidad positiva), y negativo\(k\) implica que la onda se mueve a la izquierda (velocidad negativa). Además, la velocidad de onda es el valor absoluto de la velocidad, que es precisamente igual a la constante\(v\):\[\textrm{speed}\; = \, \left|\frac{\delta x}{\delta t}\right| = \frac{\omega}{\left|k\right|} = v.\]
Ondas estacionadas
Supongamos que tenemos dos soluciones de onda viajera, con igual amplitud y frecuencia, moviéndose en direcciones opuestas:\[f(x,t) = f_0 \, \cos(kx - \omega t + \phi_1) + f_0 \cos(-kx - \omega t + \phi_2).\] Aquí, denotamos\(k = \omega/c\). Tal superposición es también una solución a la ecuación de onda, llamada onda estacionaria. Se puede reescribir en una forma separada variable (es decir, como el producto de una función de\(x\) y una función de\(t\)):\[f(x,t) = 2f_0 \, \cos\big[kx + (\phi_1-\phi_2)/2\big]\, \cos\big[\omega t - (\phi_1+\phi_2)/2\big]. \label{standingsol}\] Esto se puede probar usando las fórmulas de adición trigonométrica, pero la prueba es tediosa.