
9.2: Aceleración angular
- Page ID
- 128495

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)objetivos de aprendizaje
- Relacionar el ángulo de rotación, la velocidad angular y la aceleración angular con sus equivalentes en cinemática lineal
Simplemente usando nuestra intuición, podemos comenzar a ver la interrelación de cantidades rotacionales como θ (ángulo de rotación), ω (velocidad angular) y α (aceleración angular). Por ejemplo, si una rueda de motocicleta tiene una aceleración angular grande durante bastante tiempo, termina girando rápidamente y girando a través de muchas revoluciones. El movimiento de rotación de la rueda es análogo al hecho de que la gran aceleración traslacional de la motocicleta produce una gran velocidad final, y la distancia recorrida también será grande.
Ecuaciones Cinemáticas
La cinemática es la descripción del movimiento. Ya hemos estudiado ecuaciones cinemáticas que rigen el movimiento lineal bajo aceleración constante:
\[\begin{align} \mathrm{v} & \mathrm{=v_0+at} \\ \mathrm{x} & \mathrm{=v_0t+\frac{1}{2}at^2} \\ \mathrm{v^2} & \mathrm{=v_0^2+2ax} \end{align}\]
De manera similar, la cinemática del movimiento rotacional describe las relaciones entre el ángulo de rotación, la velocidad angular, la aceleración angular y el tiempo. Empecemos por encontrar una ecuación que relacione ω, α y t. Para determinar esta ecuación, usamos la ecuación correspondiente para el movimiento lineal:
\[\mathrm{v=v_0+at.}\]
Al igual que en la cinemática lineal donde asumimos que a es constante, aquí asumimos que la aceleración angular α es una constante, y podemos usar la relación:\(\mathrm{a=rα}\) Donde r — radio de curva. Del mismo modo, tenemos las siguientes relaciones entre valores lineales y angulares:
\[\begin{align} \mathrm{v} & \mathrm{=rω} \\ \mathrm{x} & \mathrm{=rθ} \end{align}\]
Mediante el uso de las relaciones\(\mathrm{a=rα, v=rω,}\) y\(\mathrm{x=rθ}\), derivamos todas las demás ecuaciones cinemáticas para el movimiento rotacional bajo aceleración constante:
\[\begin{align} \mathrm{ω} & \mathrm{=ω_0+αt} \\ \mathrm{θ} & \mathrm{=ω_0t+\frac{1}{2}αt^2} \\ \mathrm{ω^2} & \mathrm{= ω_0^2+2αθ} \end{align}\]
Las ecuaciones dadas anteriormente pueden ser utilizadas para resolver cualquier problema de cinemática rotacional o traslacional en el que a y α sean constantes. muestra la relación entre algunas de las cantidades discutidas en este átomo.
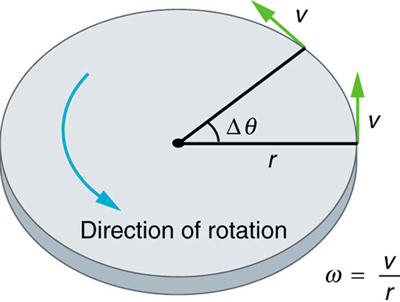
Lineal y Angular: Esta figura muestra un movimiento circular uniforme y algunas de sus cantidades definidas.
Puntos Clave
- Las ecuaciones cinemáticas para movimiento rotacional y/o lineal dadas aquí pueden ser utilizadas para resolver cualquier problema de cinemática rotacional o traslacional en el que a y α sean constantes.
- Mediante el uso de las relaciones entre velocidad y velocidad angular, distancia y ángulo de rotación, y aceleración y aceleración angular, las ecuaciones cinemáticas rotacionales se pueden derivar de sus contrapartes de movimiento lineal.
- Para derivar ecuaciones rotacionales de las contrapartes lineales, se utilizaron las relaciones\(\mathrm{a=rα, v=rω,}\) y\(\mathrm{x=rθ}\).
Términos Clave
- cinemática: La rama de la mecánica que se ocupa de los objetos en movimiento, pero no de las fuerzas involucradas.
- angular: Relativo a un ángulo o ángulos; tener un ángulo o ángulos; formar un ángulo o esquina; con esquinas agudas; puntiagudas; puntiagudas; como en, una figura angular.
LICENCIAS Y ATRIBUCIONES
CONTENIDO CON LICENCIA CC, COMPARTIDO PREVIAMENTE
- Curación y Revisión. Proporcionado por: Boundless.com. Licencia: CC BY-SA: Atribución-CompartirIgual
CC CONTENIDO LICENCIADO, ATRIBUCIÓN ESPECÍFICA
- OpenStax College, Cinemática del Movimiento Rotacional. 17 de septiembre de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42178/latest/. Licencia: CC BY: Atribución
- cinemática. Proporcionado por: Wikcionario. Ubicado en: es.wiktionary.org/wiki/cinemática. Licencia: CC BY-SA: Atribución-CompartirIgual
- angular. Proporcionado por: Wikcionario. Ubicado en: es.wiktionary.org/wiki/angular. Licencia: CC BY-SA: Atribución-CompartirIgual
- Colegio OpenStax, Colegio de Física. 17 de febrero de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42177/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución