
20A: Torque y movimiento circular




( \newcommand{\kernel}{\mathrm{null}\,}\)
El error que surge en la aplicación de la 2da Ley de Newton para el Movimiento Rotacional implica la sustitución de la suma de los pares alrededor de algún eje en particular∑τo↺,, por una suma de términos que no son todos pares. A menudo, la suma errante incluirá fuerzas sin brazos de momento (una fuerza por un brazo de momento es un par, pero una fuerza por sí misma no es un par) y en otros casos la suma errante incluirá un término que consiste en un par multiplicado por un brazo de momento (un par ya es un par, multiplicándolo por un brazo de momento cede algo que no es un par). Las personas que tienen el hábito de verificar unidades se darán cuenta de su error tan pronto como conecten valores con unidades y evalúen.
Hemos estudiado el movimiento de los objetos giratorios sin ninguna discusión sobre el torque. Es hora de abordar el vínculo entre el par y el movimiento rotacional. Primero, revisemos el vínculo entre la fuerza y el movimiento traslacional. (El movimiento traslacional tiene que ver con el movimiento de una partícula a través del espacio. Esta es la moción ordinaria con la que has trabajado bastante. Hasta que empezamos a hablar de movimiento rotacional llamamos movimiento traslacional “movimiento”. Ahora bien, para distinguirlo del movimiento rotacional, lo llamamos movimiento de traslación). La verdadera respuesta a la pregunta de qué causa que persista el movimiento, es nada: una partícula en movimiento sin fuerza sobre ella sigue moviéndose a velocidad constante. Sin embargo, siempre que la velocidad de la partícula está cambiando, hay una fuerza. El vínculo directo entre fuerza y movimiento es una relación entre fuerza y aceleración. La relación se conoce como la 2ª Ley del Movimiento de Newton que hemos escrito como ecuación???:
→a=1m∑→F
en el que,
- →a es la aceleración del objeto, qué tan rápido y en qué dirección cambia su velocidad
- m es la masa, también conocida como inercia, del objeto. 1mpuede verse como un factor de lentitud, cuanto mayor es la masam, menor es el valor de1m y, por lo tanto, menor es la aceleración del objeto para una fuerza neta dada. (“Net” en este contexto solo significa “total”.)
- ∑→F es la suma vectorial de las fuerzas que actúan sobre el objeto, la fuerza neta.
Encontramos una situación completamente análoga en el caso del movimiento rotacional. El vínculo en el caso del movimiento rotacional se encuentra entre la aceleración angular de un cuerpo rígido y el par que se ejerce sobre ese cuerpo rígido.
→α=1I∑→τ
en el que,
- →αes la aceleración angular del cuerpo rígido, qué tan rápido y en qué dirección cambia la velocidad angular
- Ies el momento de inercia, también conocido como la inercia rotacional (pero no solo la inercia vieja simple, que es la masa) del cuerpo rígido. Es la resistencia inherente del cuerpo rígido a un cambio en la rapidez con la que gira (el cuerpo rígido). (“Inherente” significa “de sí mismo”, “parte de su propio ser”.) 1Ise puede ver como un factor de lentitud, cuanto mayor es la inercia de rotaciónI, menor es el valor1I y, por lo tanto, menor es la aceleración angular del objeto para un par neto dado.
- ∑→τes el par neto que actúa sobre el objeto. (Un torque es lo que estás aplicando a la tapa de una botella o a la tapa de un frasco cuando intentas desenroscarla).
La naturaleza vectorial del par y la velocidad angular
Seguramente has notado las flechas sobre las letras utilizadas para representar el par, la aceleración angular y la velocidad angular; y como sabes, las flechas significan que las cantidades en cuestión son cantidades vectoriales. Eso quiere decir que tienen tanto magnitud como dirección. Alguna explicación sobre la parte de dirección está en orden. Comencemos con el par. Como se mencionó, es una acción de torsión como la que aplicas a la tapa de la botella para aflojar o apretar la tapa de la botella. Hay dos formas de especificar la dirección asociada con el par. Una forma es identificar el eje de rotación alrededor del cual se está aplicando el par, luego establecer un punto de vista, una posición sobre el eje, en una ubicación que esté en una dirección u otra dirección alejada del objeto. Entonces, o bien indique que el par es en el sentido de las agujas del reloj, o estado que es antihorario, según se ve desde el punto de vista especificado Tenga en cuenta que no es suficiente identificar el eje y el estado “en sentido horario” o “antihorario” sin dar el punto de vista, un par que es en sentido horario desde uno de los dos puntos de vista es antihorario desde el otro. El segundo método para especificar la dirección es dar la dirección del vector de par. La convención para el vector de par es que el eje de rotación es la línea en la que se encuentra el vector de par, y la dirección está de acuerdo con “la regla de la mano derecha para algo rizado algo recto”.
Por la “regla de la mano derecha para algo rizado algo recto”, si apuntas el pulgar de tu mano derecha ahuecada en la dirección del vector de par, los dedos se curvarán alrededor en esa dirección que corresponde al sentido de rotación (en sentido antihorario como se ve desde la cabeza del vector de par mirando hacia atrás a lo largo del eje) del par.

El vector de aceleración angular→∝ y el vector de velocidad angular→ω obedecen a la misma convención. Estos vectores, que apuntan a lo largo del eje alrededor del cual se produce la rotación que representan, se denominan vectores axiales.
El par de torsión debido a una fuerza
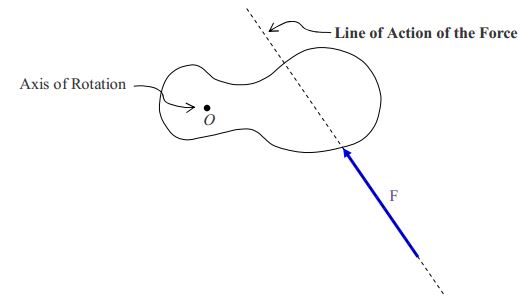
Cuando aplica una fuerza a un cuerpo rígido, normalmente aplica un par a ese cuerpo rígido al mismo tiempo. Considera un objeto que es libre de rotar alrededor de un eje fijo. Representamos el objeto visto desde una posición en el eje, a cierta distancia del objeto. Desde ese punto de vista, el eje parece un punto. Damos el nombre “punto O” a la posición en la que aparece el eje de rotación en el diagrama y lo etiquetamos como “O” en el diagrama para que sea más fácil referirnos más adelante en esta discusión. Hay una fuerza→F que actúa sobre el objeto.

La magnitud del par debido a una fuerza es la magnitud de la fuerza por el brazo de momentor⊥ (léase “r perp”) de la fuerza. El brazo de momento (r_ {\ bot}\) es la distancia perpendicular desde el eje de rotación a la línea de acción de la fuerza. La línea de acción de la fuerza es una línea que contiene el vector de fuerza. Aquí redibujamos el diagrama dado con la línea de acción de la fuerza dibujada.
A continuación extendemos un segmento lineal desde el eje de rotación hasta la línea de acción de la fuerza, de tal manera que se encuentre con la línea de acción de la fuerza en ángulo recto. La longitud de este segmento de línea es el brazo de momentor⊥.
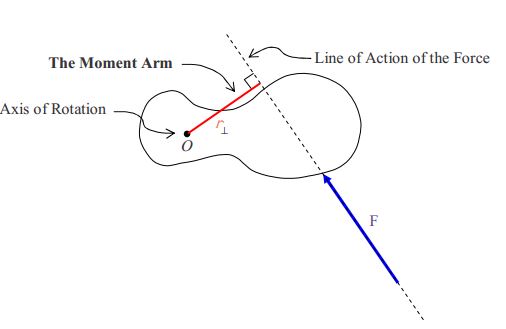
La magnitud del par alrededor del eje de rotación especificado es solo el producto del brazo de momento y la fuerza.
τ=r⊥F
Aplicación de la segunda ley de Newton para el movimiento rotacional en casos que involucran un eje fijo
A partir de la siguiente página, te contamos qué pasos se requieren (y qué diagrama se requiere) en la solución de un problema de eje fijo “Ley 2 nd de Newton para el Movimiento Rotacional” por medio de un ejemplo
Una placa metálica plana rectangular 293 mm× 452 mm se encuentra sobre una superficie plana horizontal sin fricción con (en el instante en cuestión) una esquina en el origen de un sistema de coordenadas x-y y la esquina opuesta en el punto P que está en (293 mm, 452 mm). La placa está conectada por pasador a la superficie horizontal en (10.0 cm, 10.0 cm). Un par en sentido antihorario (visto desde arriba), con respecto al pasador, de 15.0 N⋅ m, se está aplicando a la placa y una fuerza de 21.0 N en la dirección —y se aplica a la esquina de la placa en el puntoP. El momento de inercia de la placa, con respecto al pasador, es de 1.28kg⋅m2. Encuentra la aceleración angular de la placa en el instante para el cual prevalecen las condiciones especificadas.
Comenzamos dibujando un diagrama de cuerpo pseudo libre del objeto visto desde arriba (hacia abajo es “dentro de la página”):
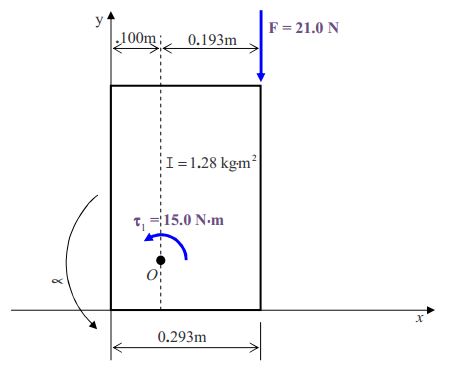
Nos referimos al diagrama como un diagrama de pseudo cuerpo libre en lugar de un diagrama de cuerpo libre porque:
a. omitimos fuerzas que son paralelas al eje de rotación (porque no afectan la rotación del objeto alrededor del eje de rotación). En el caso que nos ocupa, hemos omitido la fuerza ejercida sobre la placa por el campo gravitacional de la tierra (que estaría “en la página” en el diagrama) así como la fuerza normal ejercida por la superficie sin fricción sobre la placa (“fuera de la página”).
b. Ignoramos las fuerzas ejercidas sobre la placa por el pasador. (Tales fuerzas no tienen brazo de momento y por lo tanto no afectan la rotación de la placa alrededor del eje de rotación. Tenga en cuenta que un pasador puede, sin embargo, ejercer un par de fricción; suponga que es cero a menos que se especifique lo contrario).
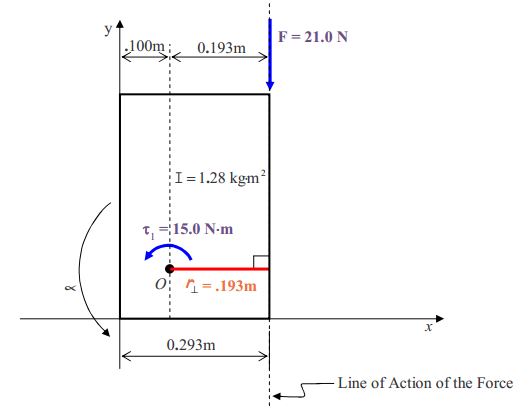
A continuación anotamos el diagrama de cuerpo pseudo libre para facilitar el cálculo del par debido a la fuerza F:
Ahora seguimos adelante y aplicamos la 2ª Ley de Newton para el Movimiento Rotacional, ecuación???:
→∝=1I∑→τ
Como en el caso de la 2ª Ley de Newton (para el movimiento traslacional) esta ecuación es de tres ecuaciones escalares en una, una ecuación para cada uno de los tres ejes mutuamente perpendiculares alrededor de los cuales podría ocurrir la rotación, bajo las circunstancias más generales. En el caso que nos ocupa, el objeto está restringido para permitir la rotación alrededor de un solo eje. En nuestra solución, necesitamos indicar que estamos sumando pares alrededor de ese eje, y necesitamos indicar cuál de los dos posibles sentidos rotacionales estamos definiendo como positivos. Eso lo hacemos por medio del subíndice∘↺ para ser leído “en sentido antihorario sobre el punto”O. La 2ª Ley de Newton para el movimiento rotacional alrededor del eje vertical (perpendicular a la página y representada por el punto etiquetado “O” en el diagrama) dice:
∝O↺=1I∑τO↺
Ahora bien, cuando reemplazamos la expresión1I∑τO↺ con la suma real término por término de los pares, observamos que de hechoτ1 es en sentido antihorario como se ve desde arriba (y por lo tanto positiva) pero que la fuerza→F, donde se aplica, tendería a causar una rotación de la placa en sentido horario, es decir,
que el par asociado a la fuerza→F es en sentido horario y por lo tanto, debe ingresar la suma con un signo menos.
∝=1I(τ1−r⊥F
Sustituyendo valores con rendimientos de unidades:
∝=11.28kg⋅m2[15.0N⋅m−0.193m(21.0N)]
Evaluar y redondear la respuesta a tres cifras significativas nos da la respuesta final:
∝=8.55rads2(counterclockwise as viewed from above)
En cuanto a las unidades contamos con:
1kg⋅m2N⋅m=1kg⋅mkg⋅ms2=1s2=rads2
donde hemos aprovechado que un newton es akg⋅ms2 y el hecho de que el radián no es una verdadera unidad sino más bien un marcador que se puede insertar según sea necesario.