
6.5: Velocidad angular y aceleración angular
- Page ID
- 125571

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
. Velocidad Angular
Siempre elegiremos un sistema de coordenadas cilíndricas diestras. Si el eje z positivo apunta hacia arriba, entonces elegimos θ para estar aumentando en sentido contrario a las agujas del reloj como se muestra en las Figuras 6.6.
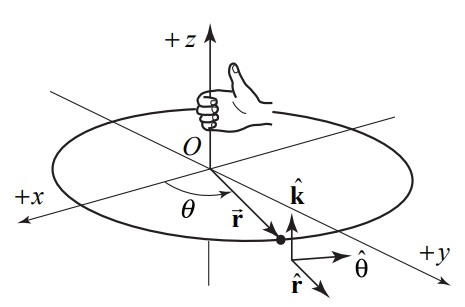
Para un objeto puntual que experimenta movimiento circular alrededor del eje z, el vector de velocidad angular\(\vec{\omega}\) se dirige a lo largo del eje z con componente z igual a la derivada de tiempo del ángulo θ,
\[\vec{\omega}=\frac{d \theta}{d t} \hat{\mathbf{k}}=\omega_{z} \hat{\mathbf{k}} \nonumber \]
Las unidades SI de velocidad angular son\(\left[\mathrm{rad} \cdot \mathrm{s}^{-1}\right]\) Tenga en cuenta que la velocidad angular es solo la magnitud del componente z de la velocidad angular,
\[\omega \equiv\left|\omega_{z}\right|=\left|\frac{d \theta}{d t}\right| \nonumber \]
Si la velocidad del objeto está en la\(+\hat{\boldsymbol{\theta}}\) dirección -dirección, (girando en sentido contrario a las agujas del reloj en la Figura 6.7 (a)), entonces el componente z de la velocidad angular es positivo,\(\omega_{z}=d \theta / d t>0\) El vector de velocidad angular luego apunta en la\(+\hat{\mathbf{k}}\) dirección -como se muestra en la Figura 6.7 (a). Si la velocidad del objeto está en la\(-\hat{\boldsymbol{\theta}}\) dirección -dirección, (girando en el sentido de las agujas del reloj en la Figura 6.7 (b)), entonces el componente z de la velocidad angular de la velocidad angular es negativo,\(\omega_{z}=d \theta / d t<0\). El vector de velocidad angular apunta entonces en la\(-\hat{\mathbf{k}}\) dirección -como se muestra en la Figura 6.7 (b).


La velocidad y la velocidad angular están relacionadas por
\[\overrightarrow{\mathbf{v}}=\overrightarrow{\boldsymbol{\omega}} \times \overrightarrow{\mathbf{r}}=\frac{d \theta}{d t} \hat{\mathbf{k}} \times r \hat{\mathbf{r}}=r \frac{d \theta}{d t} \hat{\boldsymbol{\theta}} \nonumber \]
Ejemplo 6.2 Velocidad angular
Una partícula se mueve en un círculo de radio R. At t = 0, se ubica en el eje x. El ángulo que forma la partícula con el eje x positivo viene dado por\(\theta(t)=A t-B t^{3}\) donde A y B son constantes positivas. Determinar (a) el vector de velocidad angular y (b) el vector de velocidad. Expresa tu respuesta en coordenadas polares. (c) ¿A qué hora\(t=t_{1}\) es cero la velocidad angular? (d) Cuál es la dirección de la velocidad angular para 1. \(t<t_{1}\)2. \(t>t_{1} ?\)?
Solución:
El derivado de\(\theta(t)=A t-B t^{3}\) es
\[\frac{d \theta(t)}{d t}=A-3 B t^{2} \nonumber \]
Por lo tanto, el vector de velocidad angular viene dado por
\[\overrightarrow{\boldsymbol{\omega}}(t)=\frac{d \theta(t)}{d t} \hat{\mathbf{k}}=\left(A-3 B t^{2}\right) \hat{\mathbf{k}} \nonumber \]
La velocidad viene dada por
\[\overrightarrow{\mathbf{v}}(t)=R \frac{d \theta(t)}{d t} \hat{\mathbf{\theta}}(t)=R\left(A-3 B t^{2}\right) \hat{\boldsymbol{\theta}}(t) \nonumber \]
La velocidad angular es cero en el\(t=t_{1}\) momento en que
\[A-3 B t_{1}^{2}=0 \Rightarrow t_{1}=\sqrt{A / 3 B} \nonumber \]
Para de\(t<t_{1}, \frac{d \theta(t)}{d t}=A-3 B t_{1}^{2}>0\) ahí\(\overrightarrow{\boldsymbol{\omega}}(t)\) puntos en la\(\hat{\mathbf{k}}\) dirección positiva.
Para de\(t>t_{1}, \frac{d \theta(t)}{d t}=A-3 B t_{1}^{2}<0\) ahí\(\overrightarrow{\boldsymbol{\omega}}(t)\) puntos en la\(\hat{\mathbf{k}}\) dirección positiva.
Aceleración angular
De manera similar, para un objeto puntual que experimenta movimiento circular alrededor del eje z fijo, la aceleración angular se define como
\[\vec{\alpha}=\frac{d^{2} \theta}{d t^{2}} \hat{\mathbf{k}}=\alpha_{z} \hat{\mathbf{k}} \nonumber \]
Las unidades SI de aceleración angular son\(\left[\mathrm{rad} \cdot \mathrm{s}^{-2}\right]\) La magnitud de la aceleración angular se denota con el símbolo griego alfa,
\[\alpha \equiv|\vec{\alpha}|=\left|\frac{d^{2} \theta}{d t^{2}}\right| \nonumber \]
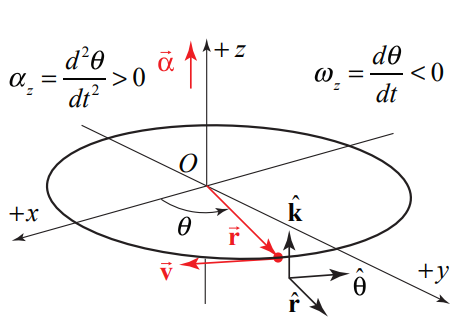
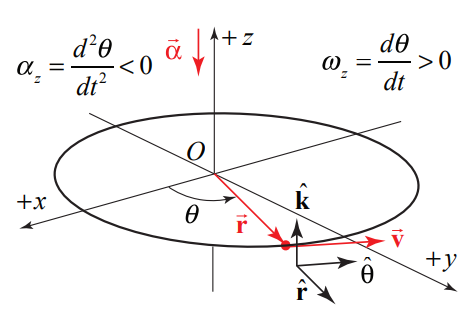
Hay cuatro casos especiales a considerar para la dirección de la velocidad angular. Primero consideremos los dos tipos de movimiento con\(\overrightarrow{\boldsymbol{\alpha}}\) apuntar en la\(\hat{\mathbf{k}}\) dirección -dirección: (i) si el objeto está girando en sentido antihorario y acelerando entonces ambos\(d \theta / d t>0\) y\(d^{2} \theta / d t^{2}>0\) (Figura 6.8 (a)) (ii) si el objeto está girando en sentido horario y ralentizando entonces\(d \theta / d t<0\) pero\(d^{2} \theta / d t^{2}>0\) ( Figura 6.8 (b). Hay dos casos correspondientes en los que\(\vec{\alpha}\) apuntar en la\(-\hat{\mathbf{k}}\) dirección -dirección (iii) si el objeto está girando en sentido antihorario y desacelerando entonces\(d \theta / d t>0\) pero\(d^{2} \theta / d t^{2}<0\) (Figura 6.9 (a), (iv) si el objeto está girando en sentido horario y acelerando entonces ambos\(d \theta / d t<0\) y\(d^{2} \theta / d t^{2}<0\) (Figura 6.9 b).


Ejemplo 6.3 Integración y Cinemática de Movimiento Circular
Un objeto similar a un punto está restringido para viajar en círculo. El componente z de la aceleración angular del objeto para el intervalo de tiempo\(\left[0, t_{1}\right]\) viene dado por la función
\ [\ alpha_ {z} (t) =\ left\ {\ begin {array} {l}
b\ left (1-\ frac {t} {t_ {1}}\ right); 0\ leq t\ leq t_ {1}\\
0; t>t_ {1}
\ end {array}\ right. \ nonumber\]
donde b es una constante positiva con unidades rad\(\cdot \mathrm{S}^{-2}\).
a) Determinar una expresión para la velocidad angular del objeto a\(t=t_{1}\).
b) ¿A través de qué ángulo ha girado el objeto en el momento\(t=t_{1}\)?
Solución:
a) La velocidad angular en el momento\(t=t_{1}\) viene dada por
\[\omega_{z}\left(t_{1}\right)-\omega_{z}(t=0)=\int_{t^{\prime}=0}^{t^{\prime}=t_{1}} \alpha_{z}\left(t^{\prime}\right) d t^{\prime}=\int_{t^{\prime}=0}^{t^{\prime}=t_{1}} b\left(1-\frac{t^{\prime}}{t_{1}}\right) d t^{\prime}=b\left(t_{1}-\frac{t_{1}^{2}}{2 t_{1}}\right)=\frac{b t_{1}}{2} \nonumber \]
b) Para encontrar el ángulo por el\(\theta\left(t_{1}\right)-\theta(t=0)\) que el objeto ha girado en el momento\(t=t_{1}\), primero es necesario encontrar\(\omega_{z}(t)\) integrando el componente z de la aceleración angular
\[\omega_{z}(t)-\omega_{z}(t=0)=\int_{t^{\prime}=0}^{t^{\prime}=t} \alpha_{z}\left(t^{\prime}\right) d t^{\prime}=\int_{t=0}^{t^{\prime}=t} b\left(1-\frac{t^{\prime}}{t_{1}}\right) d t^{\prime}=b\left(t-\frac{t^{2}}{2 t_{1}}\right) \nonumber \]
Porque partió del descanso,\(\omega_{z}(t=0)=0\), de ahí\(\omega_{z}(t)=b\left(t-\frac{t^{2}}{2 t_{1}}\right) ; 0 \leq t \leq t_{1}\)
Luego integre\(\omega_{z}(t)\) entre t = 0 y\(t=t_{1}\) para encontrar que
\[\theta\left(t_{1}\right)-\theta(t=0)=\int_{t^{\prime}=0}^{t^{\prime}=t_{1}} \omega_{z}\left(t^{\prime}\right) d t^{\prime}=\int_{t^{\prime}=0}^{t^{\prime}=t_{1}} b\left(t^{\prime}-\frac{t^{\prime 2}}{2 t_{1}}\right) d t^{\prime}=b\left(\frac{t_{1}^{2}}{2}-\frac{t_{1}^{3}}{6 t_{1}}\right)=\frac{b t_{1}^{2}}{3} \nonumber \]