8.6: Fuerzas de arrastre en fluidos
- Page ID
- 125116

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Cuando un objeto sólido se mueve a través de un fluido experimentará una fuerza resistiva, llamada fuerza de arrastre, que se opone a su movimiento. El fluido puede ser un líquido o un gas. Esta fuerza es una fuerza muy complicada que depende tanto de las propiedades del objeto como de las propiedades del fluido. La fuerza depende de la velocidad, el tamaño y la forma del objeto. También depende de la densidad, viscosidad y compresibilidad del fluido.
Para los objetos que se mueven en el aire, la resistencia aerodinámica sigue siendo bastante complicada pero para rápidamente Tabla 8.1 Coeficientes de arrastre moviendo objetos la fuerza resistiva es aproximadamente proporcional al cuadrado de la velocidad v, el área transversal A del objeto en un plano perpendicular al movimiento, la densidad ρ del aire, y independiente de la viscosidad del aire. Tradicional, la magnitud del arrastre de aire para objetos que se mueven rápidamente se escribe como
\[F_{\mathrm{drag}}=\frac{1}{2} C_{D} A \rho v^{2} \nonumber \]
El coeficiente\(C_{D}\) se denomina coeficiente de arrastre, un número adimensional que es una propiedad del objeto. La Tabla 8.1 enumera el coeficiente de arrastre para algunas formas simples, (cada uno de estos objetos tiene un número de Reynolds de orden 104).

El modelo anterior para arrastre de aire no se extiende a todos los fluidos. Un objeto caído en aceite, melaza, miel o agua caerá a diferentes velocidades debido a las diferentes viscosidades del fluido. Para velocidades muy bajas, la fuerza de arrastre depende linealmente de la velocidad y también es proporcional a la viscosidad η del fluido. Para el caso especial de una esfera de radio R, la ley de fuerza de arrastre se puede deducir exactamente de los principios de la mecánica de fluidos y viene dada por
\[\overrightarrow{\mathbf{F}}_{\mathrm{drag}}=-6 \pi \eta R \overrightarrow{\mathbf{v}} \quad(\text { sphere }) \nonumber \]
Esta ley de fuerza se conoce como Ley de Stokes. El coeficiente de viscosidad η tiene unidades SI de\(\left[\mathrm{N} \cdot \mathrm{m}^{-2} \cdot \mathrm{s}\right]=[\mathrm{Pa} \cdot \mathrm{s}]=\left[\mathrm{kg} \cdot \mathrm{m}^{-1} \cdot \mathrm{s}^{-1}\right]\); a menudo se encuentra una unidad cgs llamada poise. Algunos coeficientes típicos de viscosidad se listan en el Cuadro 8.2.

Esta ley puede aplicarse al movimiento de objetos de movimiento lento en un fluido, por ejemplo: gotitas de agua muy pequeñas que caen en un campo gravitacional, granos de arena que se asientan en el agua, o la velocidad de sedimentación de moléculas en un fluido. En el caso posterior, si modelamos una molécula como una esfera de radio R, la masa de la molécula es proporcional a R3 y la fuerza de arrastre es proporcional a R, por lo tanto, moléculas de diferentes tamaños tendrán diferentes tasas de aceleración. Esta es la base para el diseño de dispositivos de medición que separan moléculas de diferentes pesos moleculares.
En muchas situaciones físicas la fuerza sobre un objeto se modelará como dependiendo de la velocidad del objeto. Ya hemos visto la fricción estática y cinética entre superficies modelada como independiente de la velocidad relativa de las superficies. La experiencia común (nadar, lanzar un Frisbee) nos dice que la fuerza de fricción entre un objeto y un fluido puede ser una función complicada de la velocidad. En efecto, estas complicadas relaciones son una parte importante de temas como el diseño de aeronaves.
Ejemplo 8.5 Fuerza de arrastre a bajas velocidades

Un mármol esférico de radio R y masa m se libera del reposo y cae bajo la influencia de la gravedad a través de una jarra de aceite de oliva de viscosidad η. El mármol se libera del resto justo debajo de la superficie del aceite de oliva, a una altura h desde el fondo de la jarra. La aceleración gravitacional es g (Figura 8.31). Descuidar cualquier fuerza debido a la flotabilidad del aceite de oliva. (i) Determinar la velocidad del mármol en función del tiempo, (ii) cuál es la velocidad máxima posible\(\overrightarrow{\mathbf{v}}_{\infty}=\overrightarrow{\mathbf{v}}(t=\infty)\) (velocidad terminal), que puede obtener el mármol, (iii) determinar una expresión para la viscosidad del aceite de oliva η en términos de g, m, R, y\(v_{\infty}=\left|\overrightarrow{\mathbf{v}}_{\alpha}\right|\) (iv) determinar una expresión para el posición del mármol desde justo debajo de la superficie del aceite de oliva en función del tiempo.
Solución: Elija dirección y positiva hacia abajo con el origen en la posición inicial del mármol como se muestra en la Figura 8.32 (a).

Hay dos fuerzas que actúan sobre el mármol: la fuerza gravitacional y la fuerza de arrastre que viene dada por la Ecuación (8.6.2). El diagrama de cuerpo libre se muestra en la Figura 8.32 (b). La Segunda Ley de Newton es entonces
\[m g-6 \pi \eta R v=m \frac{d v}{d t} \nonumber \]
donde v es el componente y de la velocidad del mármol. Dejar\(\gamma=6 \pi \eta R / m\); las unidades SI\(\gamma\) son\(\left[\mathrm{S}^{-1}\right]\). Entonces la Ecuación (8.6.3) se convierte
\[g-\gamma v=\frac{d v}{d t} \nonumber \]
Supongamos que el objeto tiene un componente inicial y de velocidad v (t = 0) = 0. Resolveremos la Ecuación (8.6.3) utilizando el método de separación de variables. La ecuación diferencial puede ser reescrita como
\[\frac{d v}{(v-g / \gamma)}=-\gamma d t \nonumber \]
La versión integral de la Ecuación (8.6.5) es entonces
\[\int_{v^{\prime}=0}^{v^{\prime}=v(t)} \frac{d v^{\prime}}{v^{\prime}-g / \gamma}=-\gamma \int_{t^{\prime}=0}^{t^{\prime}=t} d t^{\prime} \nonumber \]
Integración de ambos lados de los rendimientos de la Ecuación (8.6.6)
\[\ln \left(\frac{v(t)-g / \gamma}{-g / \gamma}\right)=-\gamma t \nonumber \]
Recordemos que\(e^{\ln x}=x\), por lo tanto, tras la exponenciación de la ecuación (8.6.7) rinde
\[\frac{v(t)-g / \gamma}{-g / \gamma}=e^{-\gamma t} \nonumber \]
Así, la componente y de la velocidad en función del tiempo viene dada por
\[v(t)=\frac{g}{\gamma}\left(1-e^{-\gamma t}\right)=\frac{m g}{6 \pi \eta R}\left(1-e^{-(6 \pi \eta R / m) t}\right) \nonumber \]
Una gráfica de v (t) vs. t se muestra en la Figura 8.31 con parámetros\(R=5.00 \times 10^{-3} \mathrm{m}\),\(\eta=8.10 \times 10^{-2} \mathrm{kg} \cdot \mathrm{m}^{-1} \cdot \mathrm{s}^{-1}\),\(m=4.08 \times 10^{-3} \mathrm{kg}\), y\(g / \gamma=1.87 \mathrm{m} \cdot \mathrm{s}^{-1}\)

Para valores grandes de t, el término\(e^{-(6 \pi \eta R / m) t}\) se aproxima a cero y el mármol alcanza una velocidad terminal
\[v_{\infty}=v(t=\infty)=\frac{m g}{6 \pi \eta R} \nonumber \]
El coeficiente de viscosidad puede entonces ser determinado a partir de la velocidad terminal por la condición de que
\[\eta=\frac{m g}{6 \pi R v_{t e r}} \nonumber \]
Dejar\(\rho_{m}\) denotar la densidad del mármol. La masa del mármol esférico es\(m=(4 / 3) \rho_{m} R^{3}\). La velocidad terminal es entonces
\[v_{\infty}=\frac{2 \rho_{m} R^{2} g}{9 \eta} \nonumber \]
La velocidad terminal depende del cuadrado del radio del mármol, lo que indica que los mármoles más grandes alcanzarán velocidades terminales más rápidas.
La posición del mármol en función del tiempo viene dada por la expresión integral
\[y(t)-y(t=0)=\int_{t^{\prime}=0}^{t^{\prime}=t} v\left(t^{\prime}\right) d t^{\prime} \nonumber \]
que tras la sustitución de la Ecuación (8.6.9) y la integración usando la condición inicial de que y (t = 0) = 0, se convierte
\[y(t)=\frac{g}{\gamma} t+\frac{g}{\gamma^{2}}\left(e^{-\gamma t}-1\right) \nonumber \]
Ejemplo 8.6 Fuerzas de arrastre a altas velocidades
Un objeto de masa m en el tiempo t = 0 se mueve rápidamente con velocidad\(\overrightarrow{\mathbf{V}}_{0}\) a través de un fluido de densidad ρ. Deje que A denote el área de la sección transversal del objeto en un plano perpendicular al movimiento. El objeto experimenta una fuerza de arrastre retardador cuya magnitud viene dada por la Ecuación (8.6.1). Determinar una expresión para la velocidad del objeto en función del tiempo.
Solución: Elija un sistema de coordenadas tal que el objeto se mueva en la dirección x positiva\(\overrightarrow{\mathbf{v}}=v \hat{\mathbf{i}} . \text { Set } \beta=(1 / 2) C_{D} A \rho\). La Segunda Ley de Newton puede escribirse como
\[-\beta v^{2}=\frac{d v}{d t} \nonumber \]
Una versión integral de la ecuación (8.6.15) es entonces
\[\int_{v^{\prime}=v_{0}}^{v^{\prime}=v(t)} \frac{d v^{\prime}}{v^{\prime 2}}=-\beta \int_{t^{\prime}=0}^{t^{\prime}=t} d t^{\prime} \nonumber \]
Rendimientos de integración
\[-\left(\frac{1}{v(t)}-\frac{1}{v_{0}}\right)=-\beta t \nonumber \]
Después de algún reordenamiento algebraico, el componente x de la velocidad en función del tiempo viene dado por
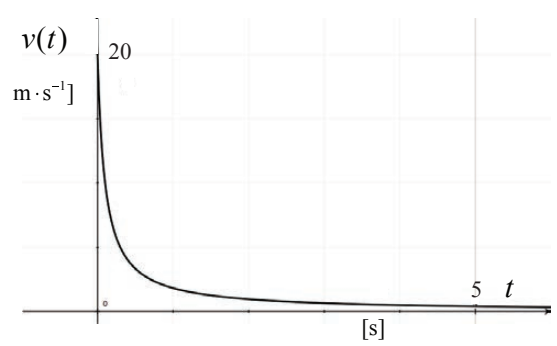
\[v(t)=\frac{v_{0}}{1+v_{0} \beta t}=\frac{1}{1+t / \tau} v_{0} \nonumber \]
donde\(\tau=1 / v_{0} \beta\). En la Figura 8.34 se muestra una gráfica de v (t) vs. t con condiciones iniciales\(v_{0}=20 \mathrm{m} \cdot \mathrm{s}^{-1}\) y\(\beta=0.5 \mathrm{s}^{-1}\)