
13.5: Trabajo realizado por Fuerzas No Constantes
- Page ID
- 125542

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Considere un cuerpo que se mueve en la dirección x bajo la influencia de una fuerza no constante en la dirección x,\(\overrightarrow{\mathbf{F}}=F_{x} \hat{\mathbf{i}}\). El cuerpo se mueve de una posición inicial\(x_{i}\) a una posición final\(x_{f}\). Para calcular el trabajo realizado por una fuerza no constante, dividiremos el desplazamiento del punto de aplicación de la fuerza en un gran número N de pequeños desplazamientos\(\Delta x_{j}\) donde el índice j marca el\(j_{th}\) desplazamiento y toma valores enteros de 1 a N. Dejar\(\left(F_{x, j}\right)_{\text {ave }}\) denotar el valor promedio del componente x de la fuerza en el intervalo de desplazamiento\(\left[x_{j-1}, x_{j}\right]\). Para el intervalo de\(j_{th}\) desplazamiento calculamos la contribución al trabajo.
\[W_{j}=\left(F_{x, j}\right)_{\text {ave }} \Delta x_{j} \nonumber \]
Esta contribución es un escalar por lo que sumamos estas cantidades escalares para obtener el trabajo total
\[W_{N}=\sum_{j=1}^{j=N} W_{j}=\sum_{j=1}^{j=N}\left(F_{x, j}\right)_{\text {ave }} \Delta x_{j} \nonumber \]
La suma en la Ecuación (13.5.2) depende del número de divisiones N y del ancho de los intervalos\(\Delta x_{j}\). Para definir una cantidad que sea independiente de las divisiones, tomamos el límite como\(N \rightarrow \infty\) y\(\left|\Delta x_{j}\right| \rightarrow 0\) para todos j. El trabajo es entonces
\[W=\lim _{N \rightarrow \infty \atop\left|\Delta x_{j}\right| \rightarrow 0} \sum_{j=1}^{j=N}\left(F_{x, j}\right)_{\text {ave }} \Delta x_{j}=\int_{x=x_{i}}^{x=x_{f}} F_{x}(x) d x \nonumber \]
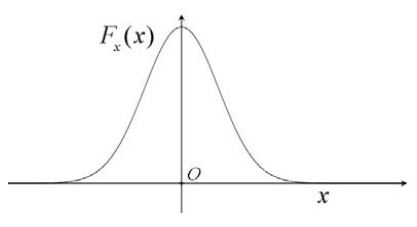
Esta última expresión es la integral definitiva del componente x de la fuerza con respecto al parámetro x. En la Figura 13.5 se grafica el componente x de la fuerza en función del parámetro x. La integral de trabajo es el área bajo esta curva entre\(x=x_{i}\) y\(x=x_{f}\).
Ejemplo\(\PageIndex{1}\): Work done by the Spring Force
Conecte un extremo de un resorte sin estirar de longitud\(l_{0}\) con la constante de resorte k a un objeto que descansa sobre una mesa lisa sin fricción y fije el otro extremo del resorte a una pared. Elija un origen como se muestra en la figura. Estire el resorte en una cantidad\(x_{i}\) y libere el objeto. ¿Cuánto trabajo hace el resorte en el objeto cuando el resorte se estira en una cantidad\(x_{f}\)?

Solución
Primero comenzamos eligiendo un sistema de coordenadas con nuestro origen ubicado en la posición del objeto cuando el resorte está sin estirar (o sin comprimir). Elegimos el vector\(\hat{\mathbf{i}}\) unitario para apuntar en la dirección en la que el objeto se mueve cuando se estira el resorte. Elegimos la función de coordenadas x para denotar la posición del objeto con respecto al origen. Mostramos la función de coordenadas y el diagrama de fuerza de cuerpo libre en la siguiente figura.
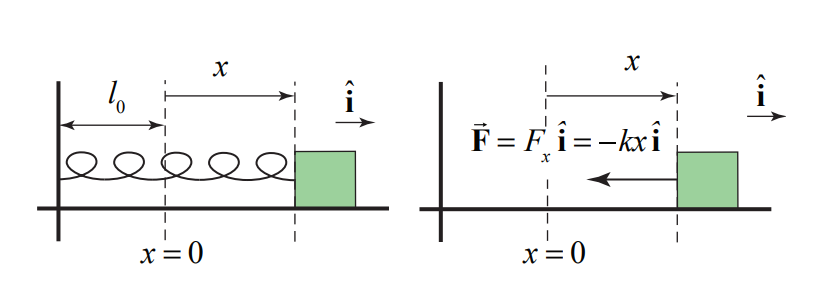
La fuerza del resorte sobre el objeto viene dada por (Figura 13.6a)
\[\overrightarrow{\mathbf{F}}=F_{x} \hat{\mathbf{i}}=-k x \hat{\mathbf{i}} \nonumber \]
En la Figura 13.7 se muestra la gráfica del componente x de la fuerza elástica\(F_{x}(x)\), en función de x

El trabajo realizado es sólo el área bajo la curva para el intervalo\(x_{i}\) a\(x_{f}\),
\[W=\int_{x^{\prime}=x_{i}}^{x^{\prime}=x_{f}} F_{x}\left(x^{\prime}\right) d x^{\prime}=\int_{x^{\prime}=x_{i}}^{x^{\prime}=x_{f}}-k x^{\prime} d x^{\prime}=-\frac{1}{2} k\left(x_{f}^{2}-x_{i}^{2}\right) \nonumber \]
Este resultado es independiente del signo de\(x_{i}\) y\(x_{f}\) porque ambas cantidades aparecen como cuadrados. Si el resorte está menos estirado o comprimido en el estado final que en el estado inicial, entonces el valor absoluto,\(\left|x_{f}\right|<\left|x_{i}\right|\) y el trabajo realizado por la fuerza del resorte es positivo. La fuerza del resorte realiza un trabajo positivo en el cuerpo cuando el resorte pasa de un estado de “mayor tensión” a un estado de “menor tensión”.