
9.3: Trabajo Virtual
- Page ID
- 131342

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Hemos visto que un sistema mecánico sujeto a fuerzas conservadoras está en equilibrio cuando las derivadas de la energía potencial con respecto a las coordenadas son cero. Un método para resolver tales problemas, por lo tanto, es anotar una expresión para la energía potencial y poner las derivadas iguales a cero.
Un método muy similar es utilizar el principio del trabajo virtual. En este método, imaginamos que actuamos sobre el sistema de tal manera que aumentemos una de las coordenadas. Imaginamos, por ejemplo, qué pasaría si tuviéramos que estirar uno de los resortes, o aumentar el ángulo entre dos varillas articuladas, o el ángulo que hace la escalera al apoyarse contra la pared. Nos preguntamos cuánto trabajo tenemos que hacer en el sistema para incrementar esta coordenada en una pequeña cantidad. Si el sistema parte del equilibrio, este trabajo será muy pequeño, y, en el límite de un desplazamiento infinitesimalmente pequeño, esta “obra virtual” será cero. Este método es muy poco diferente de establecer la derivada de la energía potencial a cero. Lo menciono aquí, sin embargo, porque el concepto podría ser útil en el Capítulo 13 para describir el principio variacional de Hamilton.
Empecemos por hacer un problema de escalera simple por el método de trabajo virtual. La escalera uniforme habitual de la física de secundaria, de longitud\( 2l\) y peso\( mg\), se inclina en el equilibrio estático limitante contra la pared vertical lisa habitual y el suelo horizontal rugoso cuyo coeficiente de fricción estática limitante es\( \mu\). ¿Cuál es el ángulo\(\theta \) que hace la escalera con la pared vertical?
He dibujado las cuatro fuerzas sobre la escalera, a saber: su peso\( mg\); la reacción normal del piso en la escalera, que también debe ser\( mg\); la fuerza de fricción, que es\( \mu mg\); y la reacción normal (y única) de la pared en la escalera, que también debe serlo\( \mu mg\).
Hay varias formas de hacer esto, que serán familiares para muchos lectores. El único pequeño recordatorio que voy a dar es señalar que, si se desea combinar las dos fuerzas al pie de la escalera en una sola fuerza que actúe hacia arriba y algo hacia la izquierda, de manera que entonces solo haya tres fuerzas que actúen sobre la escalera, las tres fuerzas deben actuar a través de un solo punto, que será por encima de la mitad de la escalera y a la derecha del punto de contacto con la pared. Pero ahora nos interesa resolver este problema por el principio del trabajo virtual.
Antes de comenzar, debo advertir que es importante al usar el principio del trabajo virtual ser meticulosamente cuidadosos con los signos, y en ese sentido les recuerdo a los lectores que en el cálculo diferencial los símbolos\( \delta\) y\( d\) frente a una cantidad escalar\( x\) no significan “un pequeño cambio en ” o “un cambio infinitesimal” en\( x\). Tal lenguaje es vago. Los símbolos representan “un pequeño aumento en” y “un aumento infinitesimal en”.
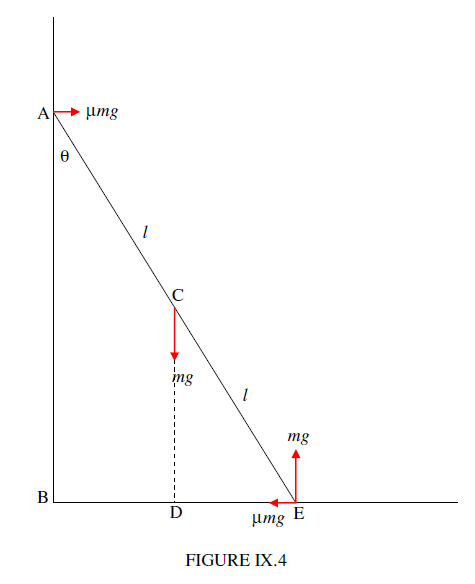
Tomemos nota de las siguientes distancias:
\[ CD = l \cos \theta \nonumber \]
y
\[ BE = 2l \sin \theta. \nonumber \]
Si tuviéramos que aumentar\( \theta\) by \( \delta\theta\), keeping the ladder in contact with wall and floor, the increases in these distances would be
\[ \delta(CD)=-l\sin\theta d\theta. \nonumber \]
y
\[ \delta(BE)=2l\cos\theta d\theta. \nonumber \]
Además, si fueran a aumentar los\( \theta\) by \( \delta\theta\), the work done by the force at C would be \( mg\) times the decrease of the distance CD, and the work done by the frictional force at E would be minus \( \mu mg\) tiempos el incremento de la distancia BE. Las otras dos fuerzas no hacen ningún trabajo. Así, el “trabajo virtual” realizado por las fuerzas externas en la escalera es
\[ mg. l\sin\theta\delta\theta-\mu mg.2l \cos\theta\delta\theta. \nonumber \]
Al poner a cero la expresión para el trabajo virtual, obtenemos
\[ \tan\theta=2\mu. \nonumber \]
Debes verificar que esta es la misma respuesta que obtienes de otros métodos, la más fácil de las cuales es probablemente tomarse momentos sobre E.
Hay algo en el trabajo virtual que me recuerda a la termodinámica. La primera ley de la termodinámica, por ejemplo es\( \Delta U=\Delta q+\Delta w\), where \( \Delta U\) is the increase of the internal energy of the system, \( \Delta q\) is the heat added to the system, and \( \Delta w\) is the work done on the system. Prepositions play an important part in thermodynamics. It is always mandatory to state clearly and without ambiguity whether work is done by the piston on the gas, or by the gas on the system; or whether heat is gained by the system or lost from it. Without these prepositions, all discussion is meaningless. Likewise in solving a problem by the principle of virtual work, it is always essential to say whether you are describing the work done by a force on what part of the system (on the ladder or on the floor?) and whether you are describing an increase or a decrease of some length or angle.
Pasemos ahora a un problema un poco más difícil, que intentaremos por tres métodos diferentes —entre ellos el del trabajo virtual—.
En la Figura IX.5, una varilla AB uniforme de peso\( Mg\) and length \( 2a\) is freely hinged at A. The end B carries a smooth ring of negligible mass. A light inextensible string of length \( l\) has one end attached to a fixed point C at the same level as A and distant \( 2a\) from it. It passes through the ring and carries at its other end a weight \( \frac{1}{10}Mg\) hanging freely. (The “smooth” ring means that the tension in the string is the same on both sides of the ring.) Find the angle CAB when the system is in equilibrium.
He marcado en varios ángulos y longitudes, que se pueden determinar fácilmente a partir de la geometría del sistema, y también he marcado las cuatro fuerzas sobre la varilla.

Primero probemos un método muy convencional. Sabemos bastante poco sobre la fuerza R de la bisagra sobre la varilla (aunque ver más abajo), y por lo tanto esta es una buena razón para tomar momentos sobre el punto A. Obtenemos de inmediato
\[ Mga\cos\theta+\frac{1}{10}Mg.2a\cos\theta=\frac{1}{10}Mg.2a\cos\frac{1}{2}\theta. \nonumber \]
Divide by \( Mga\) and set \( \cos\theta=2c^{2}-1\), where \( c=\cos\frac{1}{2}\theta\). After a little algebra, we obtain \( 12c^{2}-c-6=0\) and hence we find for the equilibrium condition that \( \theta\) = 82o 49' or 263o 37'. The latter, by the way, is a physically valid solution – you might want to sketch it.
Now let’s try the same problem using energy conditions. We’ll take the zero of potential energy when the rod is horizontal – at which time the small mass is at a distance l below the level AC.
When the angle CAB = \( \theta\), the distance of the centre of mass of the rod below AC is \( a\sin\theta\) and the distance of the small mass below AC is \( l-4a\sin\frac{1}{2}\theta+2a\sin\theta\) so that the potential energy is
\[ V=-Mga\sin\theta+\frac{1}{10}Mg[l-(l-4a\sin\frac{1}{2}\theta+2a\sin\theta)]=-\frac{2}{3}Mga(3\sin\theta-\sin\frac{1}{2}\theta) \nonumber \]
The derivative is
\[ \frac{dV}{d\theta}=-\frac{2}{3}Mga(3\cos\theta-\frac{1}{2}cos\frac{1}{2}\theta), \nonumber \]
and setting this to zero will produce the same results as before. Further differentiation (do it), or a graph of \( V\) : \( \theta\) (do it), will show that the 82o 49' solution is stable and the 263o 37' solution is unstable.
Now let’s try it by virtual work. We are going to increase \( \theta\) by \( \delta\theta\) and see how much work is done.
The distance of the centre of mass of the rod below AC is \( a\sin\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( a\cos\theta \delta\theta\), and the work done by \( Mg\) will be \( Mga \cos \theta \delta\theta\).
The distance of the ring below AC is \( 2a\sin\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( 2a\cos\theta\delta\theta\), and the work done by the downward force will be \( \frac{1}{10}Mg.2a\cos\theta \delta\theta\).
The distance BC is \( 4a\sin\frac{1}{2}\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( 2a\cos\frac{1}{2}\theta\delta\theta\) and the work done by the sloping force will be MINUS \( \frac{1}{10}Mg.2a\cos\frac{1}{2}\theta\delta\theta\).
Thus the virtual work is
\[ Mg.a\cos\theta\delta\theta+\frac{1}{10}Mg.2a\cos\theta\delta\theta-\frac{1}{10}Mg.2a\cos\frac{1}{2}\theta\delta\theta. \nonumber \]
If we put this equal to zero, we obtain the same result as before.