
17.12: Un sistema impulsado
- Page ID
- 131421

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Probablemente sería útil antes de leer esta y la siguiente sección para revisar los Capítulos 11 y 12.
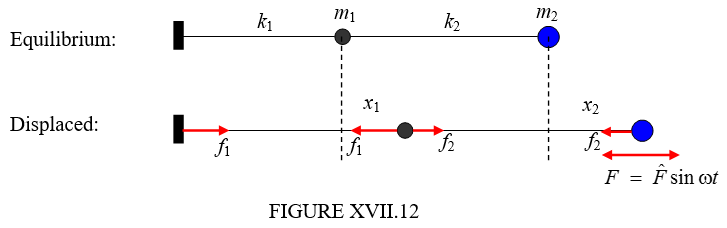
La figura XVII.12 muestra el mismo sistema que la figura XVII.2, excepto que, en lugar de dejarse vibrar por sí sola, la segunda masa está sujeta a una fuerza periódica\( F\ =\ \hat{F}\sin\omega t\). Por el momento, supondremos que no hay amortiguación. De cualquier manera, no es una fuerza conservadora, y la ecuación de Lagrange se utilizará en la forma de la Ecuación 13.4.12. Al igual que en la Sección 17.2, la energía cinética es
\[ T =\frac{1}{2}m_{1}\dot{x}_{1}^{2}\ +\ \frac{1}{2}m_{2}\dot{x}_{2}^{2}\label{17.12.1} \]
Las ecuaciones de Lagrange son
\[ \frac{d}{dt}\frac{\partial T}{\partial \dot{x}_{1}}\ -\ \frac{\partial T}{\partial x_{1}}\ =\ P_{1} \label{17.12.2} \]
y
\[ \frac{d}{dt}\frac{\partial T}{\partial \dot{x}_{2}}\ -\ \frac{\partial T}{\partial x_{2}}\ =\ P_{2}. \label{17.12.3} \]
Tenemos que identificar las fuerzas generalizadas\( P_{1}\) y\( P_{2}\).
En la posición de no equilibrio, la extensión del resorte de la mano izquierda es\( x_{1}\) y así lo es la tensión en ese resorte\( f_{1}\ =\ k_{1}x_{1}\). La extensión del resorte de la mano derecha es\( x_{2}\ -\ x_{2}\) y así la tensión en ese resorte lo es\( f_{2}\ =\ k_{2}(x_{2}-x_{1})\). Si\( x_{1}\) se incrementara por\( \delta x_{1}\), el trabajo realizado en\( m_{1}\) sería\( (f_{2}-f_{1})\delta x_{1}\) y por lo tanto la fuerza generalizada asociada a la coordenada\( x_{1}\) es\( P_{1}\ =\ k_{2}(x_{2}-x_{1})-k_{1}x_{1}\). Si\( x_{2}\) se incrementara por\( \delta x_{2}\), el trabajo realizado en\( m_{2}\) sería\( (F-f_{2})\delta x_{2}\) y por lo tanto la fuerza generalizada asociada a la coordenada\( x_{2}\) es\( P_{2}=\hat{F}\sin\omega t-k_{2}(x_{2}-x_{1})\). Por lo tanto, las ecuaciones lagrangianas del movimiento se convierten
\[ m_{1}\ddot{x}_{1}\ +\ (k_{1}+k_{2})x_{1}\ -k_{2}x_{2}\ =\ 0 \label{17.12.4} \]
y
\[ m_{2}\ddot{x}_{2}\ +\ k_{2}(x_{2}-x_{1})\ =\ \hat{F}\sin\omega t. \label{17.12.5} \]
Buscar soluciones de la forma\( \ddot{x}_{1}=-\omega^{2}x_{1}\) y\( \ddot{x}_{2}=-\omega^{2}x_{2}\). Las ecuaciones se convierten
\[ (k_{1}+k_{2}-m_{1}\omega^{2})x_{1}\ -\ k_{2}x_{2}\ =\ 0 \label{17.12.6} \]
y
\[ -k_{2}x_{1}\ +\ (k_{2}\ -\ m_{2}\omega^{2})x_{2}\ =\ \hat{F}\sin\omega t. \label{17.12.7} \]
Nosotros no, por supuesto, ahora equiparamos los determinantes de los coeficientes a cero (¿por qué no?!) , pero podemos resolver estas ecuaciones para obtener
\[ x_{1}\ =\ \frac{k_{2}\hat{F}\sin\omega t}{(k_{1}+k_{2}-m_{1}\omega^{2})(k_{2}-m_{2}\omega^{2})-k_{2}^{2}} \label{17.12.8} \]
y
\[ x_{2}\ =\ \frac{(k_{1}+k_{2}-m_{1}\omega^{2})\hat{F}\sin\omega t}{(k_{1}+k_{2}-m_{1}\omega^{2})(k_{2}-m_{2}\omega^{2})-k_{2}^{2}}. \label{17.2.9} \]
Las amplitudes de estos movimientos (y cómo varían con la frecuencia de forzamiento\( \omega\)) son
\[ \hat{x}_{1}\ =\ \frac{k_{2}\hat{F}}{m_{1}m_{2}\omega^{4}\ -\ (m_{1}k_{2}+m_{2}k_{1}+m_{2}k_{2})\omega^{2}+k_{1}k_{2}} \label{17.12.10} \]
y
\[ \hat{x}_{2}\ =\ \frac{(k_{1}+k_{2}-m_{1}\omega^{2})\hat{F}}{m_{1}m_{2}\omega^{4}\ -\ (m_{1}k_{2}+m_{2}k_{1}+m_{2}k_{2})\omega^{2}+k_{1}k_{2}} \label{17.12.11} \]
donde he reescrito los denominadores en forma de expresión cuadrática en\( \omega^{2}\).
Para ilustración dibujo, en la figura XVII.13, las amplitudes del movimiento de\( m_{1}\)(continuous curve, in black) and of \( m_{2}\)(dashed curve, in blue) for the following data:
\( \hat{F}=1,\ k_{1}=k_{2}=1,\ m_{1}=3,\ m_{2}=2,\)
cuando las ecuaciones se convierten
\[ \hat{x}_{1}=\frac{1}{6\omega^{4}-7\omega^{2}+1}=\frac{1}{(6\omega^{2}-1)(\omega^{2}-1)} \label{17.12.12} \]
y
\[ \hat{x}_{1}=\frac{2-3\omega^{2}}{6\omega^{4}-7\omega^{2}+1}=\frac{2-3\omega^{2}}{(6\omega^{2}-1)(\omega^{2}-1)} \label{17.12.13} \]
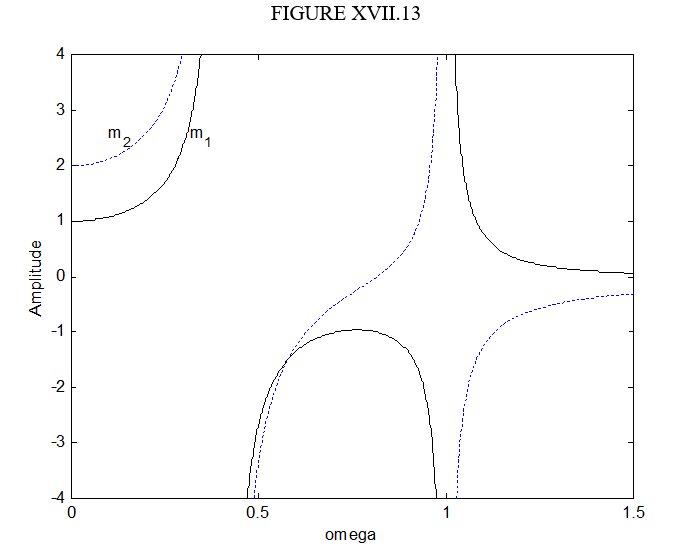
Donde la amplitud es negativa, las oscilaciones están desfasadas con la fuerza\( F\). Las amplitudes van al infinito (recordemos que estamos suponiendo aquí cero amortiguamiento) en las dos frecuencias donde los denominadores de Ecuaciones\( \ref{17.12.10}\) y\( \ref{17.12.11}\) son cero. La amplitud del movimiento de\( m_{2}\) es cero cuando el numerador de Ecuación\( \ref{17.12.11}\) es cero. Esto es a una frecuencia angular de\( \sqrt{\frac{(k_{1}+k_{2})}{m_{1}}}\), que es solo la frecuencia angular del movimiento de\( m_{1}\) sostenido por los dos resortes entre dos puntos fijos. En nuestro ejemplo numérico, esto es\( \omega\ =\ \sqrt{\frac{2}{3}}\ =\ 0.8165\). Este es un ejemplo de antirresonancia.