
6.1: Aceleración
- Page ID
- 126002

Imagina que estás en un potente auto de lujo parado en un semáforo. Mientras te sientas ahí, la gravedad te empuja hacia el cómodo asiento de cuero. La luz se vuelve verde y lo “piso”. El auto acelera y una fuerza adicional te empuja hacia el respaldo del asiento. Redondea una curva, y otra fuerza te empuja hacia el exterior de la curva. (¡Pero el asiento y el cinturón de seguridad bien diseñados te mantienen sin sentir molestias!)
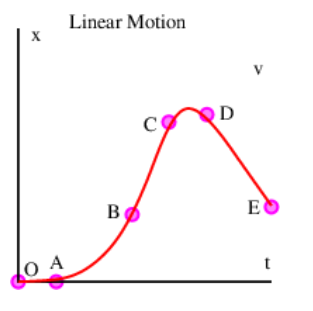
Examinemos más de cerca la idea de aceleración. Considerando la primera aceleración en una dimensión, la figura 6.1 muestra la posición de un objeto en función del tiempo,\(\mathrm{x}(\mathrm{t})\). La velocidad es simplemente la tasa de tiempo de cambio de la posición:
\[v(t)=\frac{d x(t)}{d t}\label{6.1}\]
La aceleración es la tasa de cambio de velocidad en el tiempo:
\[a(t)=\frac{d v(t)}{d t}=\frac{d^{2} x(t)}{d t^{2}}\label{6.2}\]
En la figura 6.1, solo el segmento OA tiene velocidad cero. La velocidad está aumentando en AB, y la aceleración es positiva allí. La velocidad es constante en BC, lo que significa que la aceleración es cero. La velocidad disminuye en CD y la aceleración es negativa. Finalmente, en DE, la velocidad es negativa y la aceleración es cero.
En dos o tres dimensiones, la posición x, la velocidad v y la aceleración a son todos vectores, de modo que la velocidad es
\[\mathbf{v}(t)=\frac{d \mathbf{x}(t)}{d t}\label{6.3}\]
mientras que la aceleración es
\[\mathbf{a}(t)=\frac{d \mathbf{v}(t)}{d t}\label{6.4}\]
Por lo tanto, en un corto intervalo de tiempo\(\Delta t\), se pueden escribir los cambios en x y v
\[\Delta \mathbf{x}=\mathbf{v} \Delta t \quad \Delta \mathbf{v}=\mathbf{a} \Delta t\label{6.5}\]
Se trata de ecuaciones vectoriales, por lo que las restaciones que implican las operaciones “delta” deben hacerse vectorialmente. Un ejemplo donde la naturaleza vectorial de estas cantidades es importante es el movimiento en círculo a velocidad constante, que se discute en la siguiente sección.