12.7: Combinando Máquinas Turing
- Page ID
- 103675

Los ejemplos de máquinas Turing que hemos visto hasta ahora han sido de naturaleza bastante simple. Pero, de hecho, cualquier problema que pueda resolverse con cualquier lenguaje de programación moderno también se puede resolver con máquinas Turing. Para construir máquinas Turing más complejas, es importante convencernos de que podemos combinarlas, así podemos construir máquinas para resolver problemas más complejos rompiendo el procedimiento en piezas más simples. Si podemos encontrar una manera natural de dividir un problema complejo en partes constituyentes, podemos abordar el problema en varias etapas, creando varias máquinas Turing simples y combinándolas en una sola máquina que pueda resolver el problema. Este punto es especialmente importante a la hora de abordar el problema de la detención en la siguiente sección.
Ejemplo\(\PageIndex{1}\)
Máquinas Combinadoras: Diseñe una máquina que calme la función\(f(m,n) = 2(m+n)\).
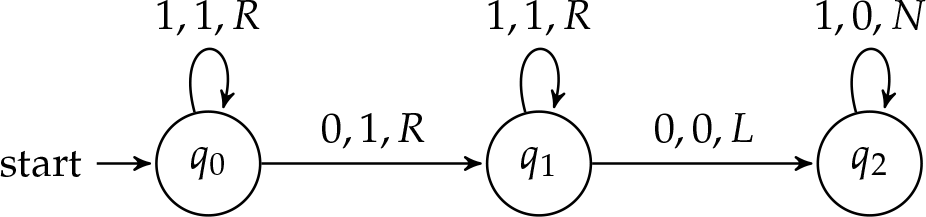
Para construir esta máquina, podemos combinar dos máquinas con las que ya estamos familiarizados: la máquina de adición y la dobladora. Comenzamos dibujando un diagrama de estado para la máquina de adición.
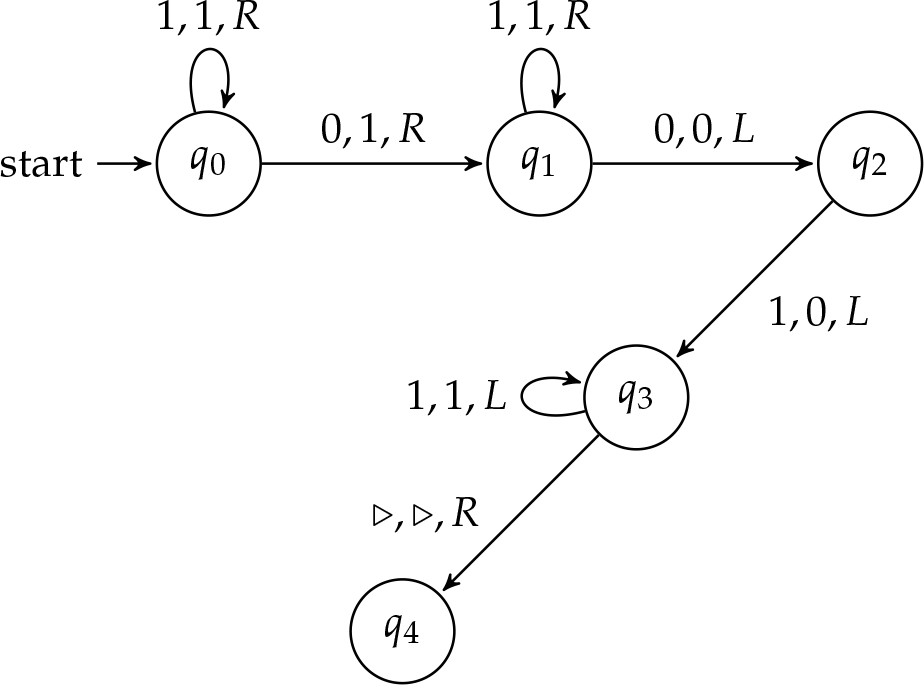
En lugar de detenernos en estado\(q_2\), queremos continuar operando para duplicar la salida. Recordemos que la máquina dobladora borra el primer trazo en la entrada y escribe dos trazos en una salida separada. Agreguemos una instrucción para asegurarnos de que el cabezal de cinta esté leyendo el primer golpe de la salida de la máquina de adición.
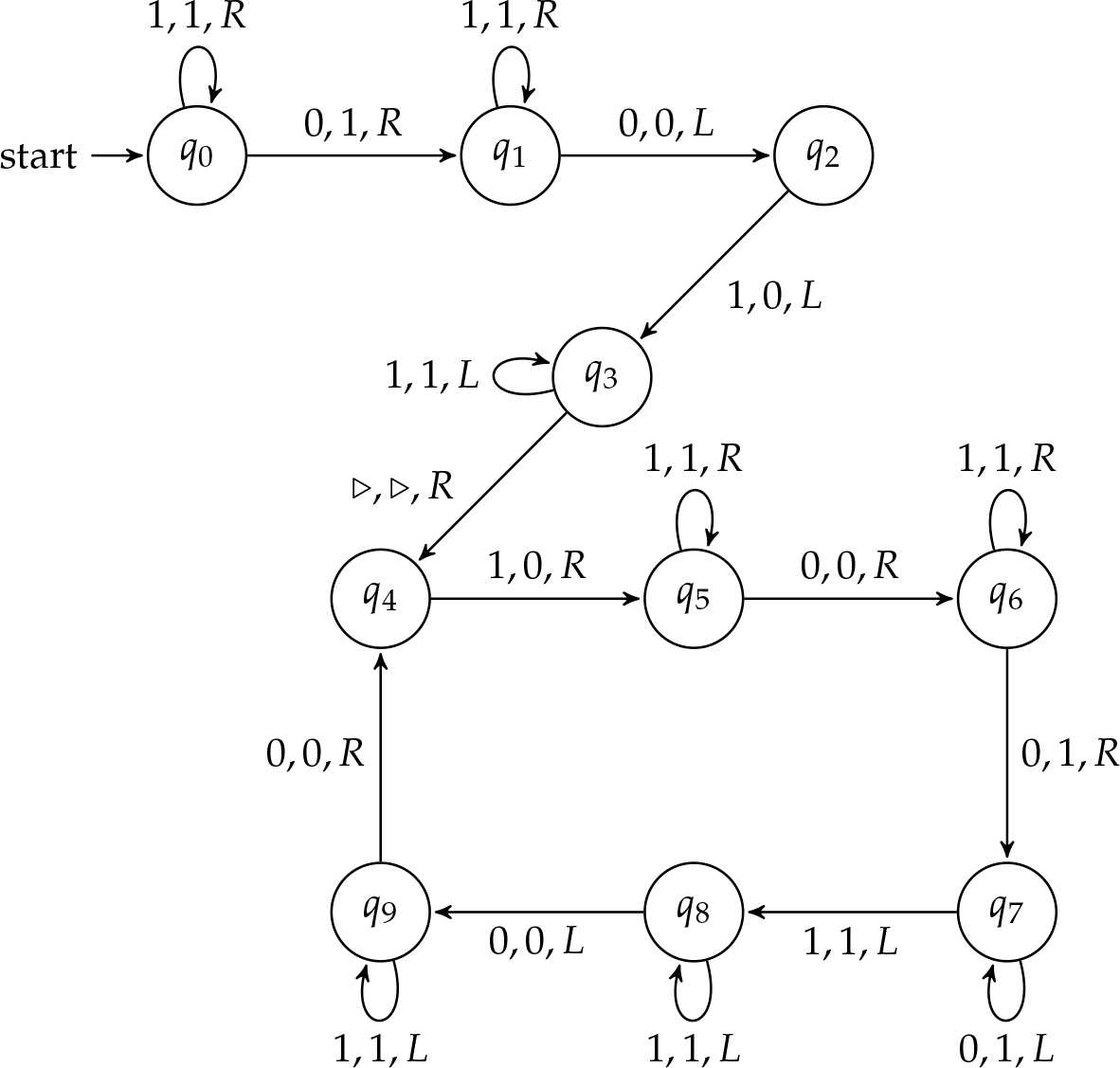
Ahora es fácil duplicar la entrada, todo lo que tenemos que hacer es conectar la máquina dobladora al estado\(q_4\). Esto requiere cambiar el nombre de los estados de la máquina dobladora para que comiencen en\(q_4\) lugar de\(q_0\) —de esta manera no terminamos con dos estados iniciales. El diagrama final debe verse como en la Figura\(\PageIndex{1}\).