
11.3.1: Sistemas autónomos
- Page ID
- 87221

Utilizando únicamente sistemas de navegación autónomos, la técnica de navegación más avanzada a utilizar es el cálculo por estima. Como se muestra en la Sección 11.1, el cálculo a estima consiste en predecir la posición futura de la aeronave en función de la posición actual, velocidad y rumbo. Obviamente, se debe conocer una posición de referencia (o inicial) de la aeronave. Para determinar esta posición de referencia, se pueden utilizar diferentes medios, por ejemplo, observar un punto cercano a la aeronave cuya posición es conocida (muy rudimentaria), la observación de cuerpos celestes (también rudimentarios), o el uso de los llamados sistemas autónomos, que también son capaces de determinar la velocidad y curso de la aeronave.
Los dos principales sistemas autónomos son:
- El radar Doppler.
- El Sistema de Navegación Inercial (INS).
Radar Doppler: Un radar Doppler es un radar específico que hace uso del efecto Doppler para calcular la velocidad de un objeto en movimiento a cierta distancia. Lo hace transmitiendo una señal de microondas hacia el objetivo, por ejemplo, un avión volador, y escuchando su reflejo. Una vez escuchada la reflexión, se trata analizando cómo la frecuencia de la señal ha sido modificada por el movimiento del objeto. Esta variación proporciona mediciones directas y altamente precisas de la componente radial de la velocidad de un objetivo en relación con el radar.
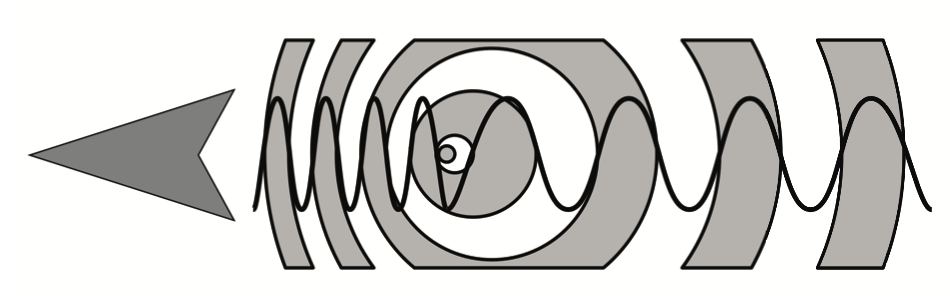
Figura 11.3: Efecto Doppler: cambio de longitud de onda causado por el movimiento de la fuente. © User:Tkarcher/Wikimedia Commons/CC-BY-SA-3.0.
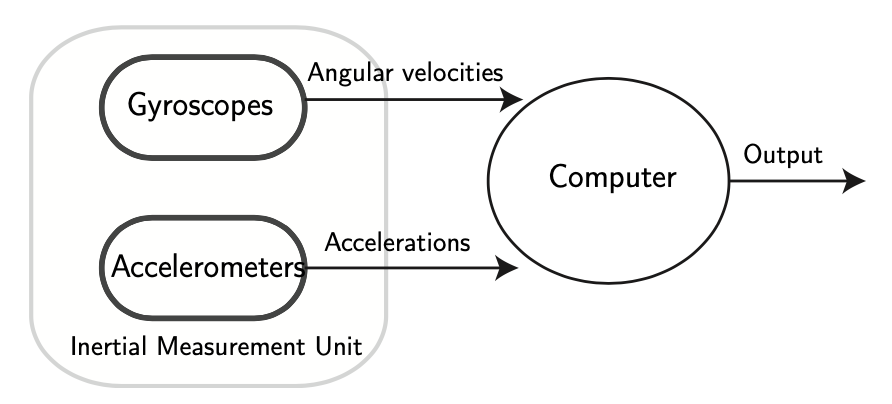
Figura 11.4: Esquema de un Sistema de Navegación Inercial (INS). La salida se refiere a la posición, la actitud y la velocidad.
Sistema de navegación inercial (INS): Un sistema de navegación inercial (INS) incluye al menos una computadora y una plataforma o módulo que contiene acelerómetros, giroscopios u otros dispositivos sensores de movimiento. A esta última se le conoce como Unidad de Medición Inercial (IMU). La computadora realiza los cálculos de navegación. Al INS se le proporciona inicialmente su posición y velocidad desde otra fuente (un operador humano, un receptor de satélite GPS, etc.), y posteriormente calcula su propia posición y velocidad actualizadas integrando la información recibida de los sensores de movimiento. La Figura 11.4 lo ilustra esquemáticamente. La ventaja de un INS es que no requiere referencias externas para determinar su posición, orientación o velocidad una vez que se ha inicializado. Por el contrario, la precisión es limitada, especialmente para largas distancias. Existen dos sistemas de navegación inercial fundamentales:
- sistemas de plataforma estables (alineados con el marco de referencia global)
- y sistemas de correa hacia abajo (alineados con el marco de la carrocería).
Los giroscopios miden la velocidad angular de la aeronave en el marco de referencia inercial (por ejemplo, el marco de referencia terrestre). Al usar la orientación original de la aeronave en el marco de referencia inercial como condición inicial e integrar la velocidad angular, se puede conocer la orientación (actitud) de la aeronave.
Los acelerómetros miden la aceleración lineal de la aeronave, pero en direcciones que solo se pueden medir en relación con el sistema en movimiento (ya que los acelerómetros están unidos a la aeronave y giran con ella, pero no son conscientes de su propia orientación). Solo con base en esta información, se sabe cómo la aeronave está acelerando respecto a sí misma, es decir, en un marco de referencia no inercial como el marco de referencia del viento, es decir, si está acelerando hacia adelante, hacia atrás, izquierda, derecha, hacia arriba o hacia abajo medido en relación con la aeronave, pero no el dirección (actitud) relativa a la Tierra. La actitud será un insumo proporcionado por los giroscopios.
Al rastrear tanto la velocidad angular de la aeronave como la aceleración lineal de la aeronave medida respecto a sí misma, es posible determinar la aceleración lineal de la aeronave en el marco de referencia inercial. Al realizar la integración en las aceleraciones inerciales (utilizando la velocidad original como condiciones iniciales) utilizando las ecuaciones cinemáticas correctas se obtienen las velocidades inerciales del sistema, y la integración nuevamente (usando la posición original como condición inicial) produce la posición inercial. Estos cálculos están fuera del alcance de este curso ya que se necesita tomar en cuenta el movimiento relativo, que se va a estudiar con anticipación cursos de mecánica. Sin embargo, en el Capítulo 7 y en el Apéndice A. Se han propuesto dos ejercicios (ver Ejercicios 11.1-11.2) para lectores interesados.
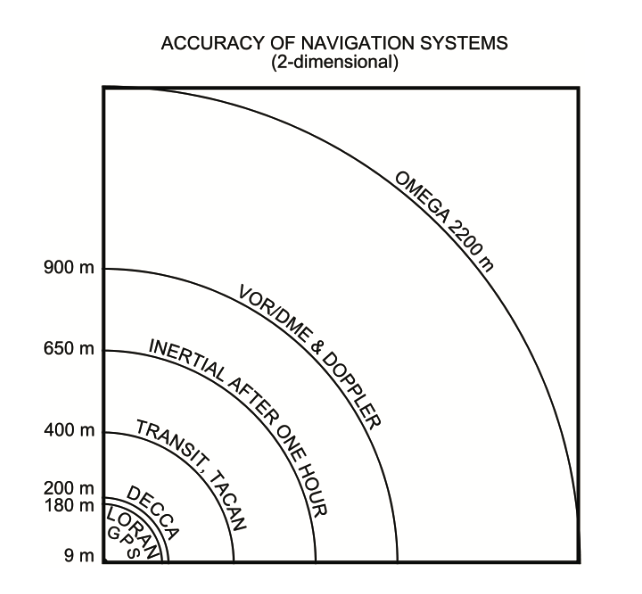
Figura 11.5: Precisión de los sistemas de navegación en 2d. © Johannes Rössel/Wikimedia Commons/CC-BY-SA-3.0
Errores en el sistema de navegación inercial: Todos los sistemas de navegación inercial sufren de deriva de integración: pequeños errores en la medición de la aceleración y la velocidad angular se integran en errores progresivamente mayores en la velocidad, los cuales se agravan en errores aún mayores en la posición. Dado que la nueva posición se calcula a partir de la posición calculada anterior y la aceleración medida y velocidad angular, estos errores son acumulativos y aumentan a una velocidad aproximadamente proporcional al tiempo desde que se ingresó la posición inicial. Por lo tanto, la posición debe ser corregida periódicamente por la entrada de algún otro tipo de sistema de navegación. La imprecisión de un sistema de navegación de buena calidad es normalmente inferior a 0.6 millas náuticas por hora en posición y del orden de décimas de grado por hora en orientación. La figura 11.5 lo ilustra en relación con otros sistemas de navegación autónomos (a estudiar en lo que sigue).
En consecuencia, la navegación inercial suele complementarse con otros sistemas de navegación (típicamente sistemas no autónomos), proporcionando un mayor grado de precisión. La idea es que la posición (en general, el estado de la aeronave) se mida con algún sensor, por ejemplo, el GPS, y luego, utilizando técnicas de filtrado (filtrado de Kalman, por ejemplo), estimar la posición en base a una suma ponderada tanto de la posición medida como de la posición predicha (la resultante de la inercia navegación). Los factores de ponderación están relacionados con la magnitud de los errores tanto en la posición medida como en la predicha. Al combinar adecuadamente ambas fuentes, los errores de posición y velocidad son casi estables a lo largo del tiempo. La ecuación del filtro de Kalman no se cubre en este curso y se estudiará en cursos más avanzados.