
11.3.5: LORAN-C
- Page ID
- 87213

El sistema de navegación LONG Range está constituido por una cadena de estaciones que permiten un amplio rango de cobertura utilizando señales de radio de baja frecuencia. Es una evolución de su precursor: Loran-A, desarrollado durante la Segunda Guerra Mundial. LORAN se basa en medir la diferencia de tiempo entre la recepción de señales de un par de transmisores de radio. Una diferencia de tiempo constante dada entre las señales de las dos estaciones puede ser representada por una línea hiperbólica de posición. Si se conocen las posiciones de las dos estaciones sincronizadas, entonces la posición de la aeronave se puede determinar como que está en algún lugar en una curva hiperbólica particular donde la diferencia de tiempo entre las señales recibidas es constante. En condiciones ideales, esto es proporcionalmente equivalente a la diferencia de las distancias de la aeronave a cada una de las dos estaciones.
Una aeronave que solo recibe señales de un par de estaciones LORAN no puede fijar completamente su posición. El avión debe recibir y calcular la diferencia de tiempo entre un segundo par de estaciones. Esto permite calcular una segunda línea hiperbólica sobre la que se ubica la aeronave. En la práctica, una de las estaciones del segundo par también puede estar (y frecuentemente lo es) en el primer par. Esto significa que se deben recibir señales de al menos tres transmisores LORAN para localizar exactamente la aeronave. Al determinar la intersección de las dos curvas hiperbólicas, se puede determinar la ubicación de la aeronave.
LORAN ha sido ampliamente utilizado para navegar al sobrevolar océanos, donde los rangos de cobertura DME y VOR son insuficientes. En las últimas décadas el uso de LORAN ha estado en fuerte declive, con los sistemas GNSS como reemplazo primario. Sin embargo, ha habido intentos de mejorar LORAN, principalmente para servir como respaldo a los sistemas GNSS.
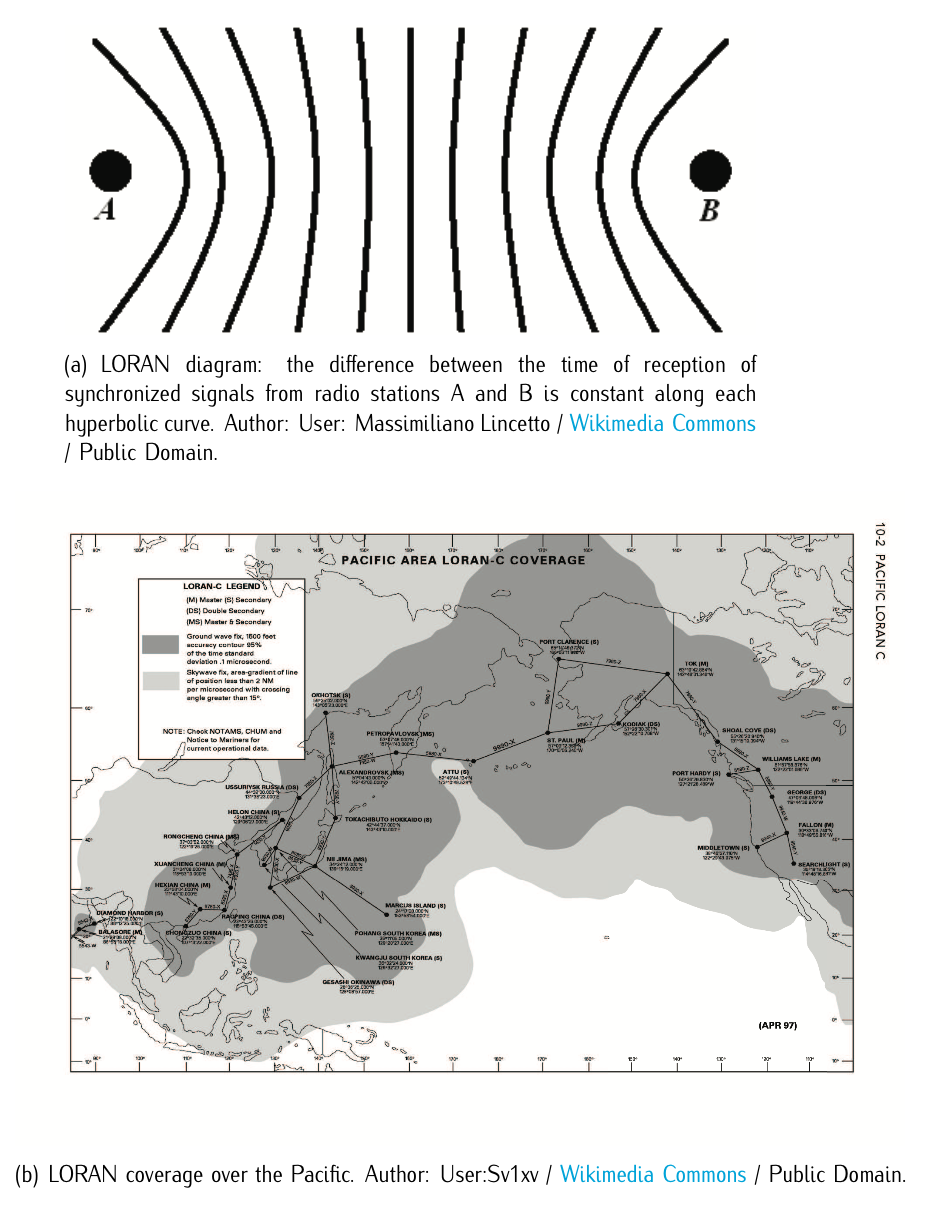
Figura 11.10: LORAN.