
9.3: Afinación PID a través de métodos clásicos
- Page ID
- 85578

Introducción
Actualmente, más de la mitad de los controladores utilizados en la industria son controladores PID. En el pasado, muchos de estos controladores eran analógicos; sin embargo, muchos de los controladores actuales utilizan señales digitales y computadoras. Cuando se dispone de un modelo matemático de un sistema, se pueden determinar explícitamente los parámetros del controlador. Sin embargo, cuando un modelo matemático no está disponible, los parámetros deben determinarse experimentalmente. La sintonización del controlador es el proceso de determinar los parámetros del controlador que producen la salida deseada. El ajuste del controlador permite la optimización de un proceso y minimiza el error entre la variable del proceso y su punto de ajuste.
Los tipos de métodos de ajuste del controlador incluyen el método de prueba y error y los métodos de curva de reacción del proceso. Los métodos clásicos de sintonización de controladores más comunes son los métodos Ziegler-Nichols y Cohen-Coon. Estos métodos se utilizan a menudo cuando el modelo matemático del sistema no está disponible. El método Ziegler-Nichols se puede usar tanto para sistemas de bucle cerrado como abierto, mientras que Cohen-Coon se usa típicamente para sistemas de bucle abierto. Un sistema de control de bucle cerrado es un sistema que utiliza control de retroalimentación. En un sistema de bucle abierto, la salida no se compara con la entrada.
La siguiente ecuación muestra el algoritmo PID como se discutió en la sección de Control PID anterior.
\[u(t)=K_{c}\left(\epsilon(t)+\frac{1}{\tau_{i}} \int_{0}^{t} \epsilon\left(t^{\prime}\right) d t^{\prime}+\tau_{d} \frac{d \epsilon(t)}{d t}\right)+b \nonumber \]
donde
- u es la señal de control
- ε es la diferencia entre el valor actual y el punto de ajuste.
- K c es la ganancia para un controlador proporcional.
- τ i es el parámetro que escala el controlador integral.
- τ d es el parámetro que escala el controlador derivado.
- t es el tiempo necesario para la medición de errores.
- b es el valor de punto de ajuste de la señal, también conocido como sesgo o offset.
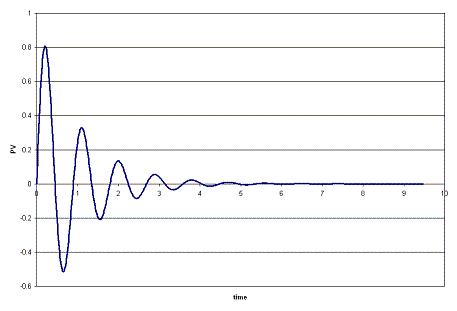
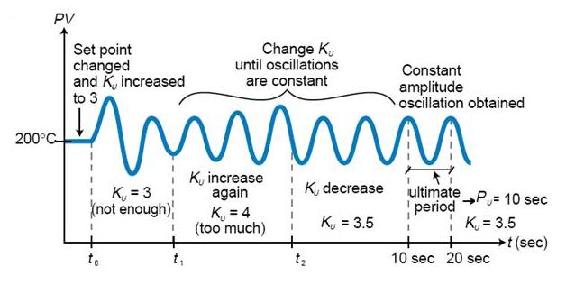
La ganancia del controlador obtenida experimentalmente que da oscilaciones estables y consistentes para sistemas de bucle cerrado, o la ganancia final, se define como K u. K c es la ganancia del controlador que ha sido corregida por los métodos Ziegler-Nichols o Cohen-Coon, y se puede ingresar en la ecuación anterior. K u se encuentra experimentalmente partiendo de un pequeño valor de K c y ajustando hacia arriba hasta obtener oscilaciones consistentes, como se muestra a continuación. Si la ganancia es demasiado baja, la señal de salida se amortiguará y alcanzará el equilibrio eventualmente después de que ocurra la perturbación como se muestra a continuación.
Por otro lado, si la ganancia es demasiado alta, las oscilaciones se vuelven inestables y crecen cada vez más con el tiempo como se muestra a continuación.
La sección del método de curva de reacción del proceso muestra los parámetros requeridos para los cálculos del sistema de bucle abierto. La sección Método Ziegler-Nichols muestra cómo encontrar K c, T i y T d para sistemas de bucle abierto y cerrado, y la sección Cohen-Coon muestra una forma alternativa de encontrar K c, T i y T d.
Los sistemas de bucle abierto suelen utilizar la relación de decaimiento de cuarto (QDR) para amortiguar las oscilaciones. Esto significa que la relación de las amplitudes del primer sobreimpulso al segundo sobreimpulso es 4:1.
Prueba y error
El método de ajuste de prueba y error se basa en conjeturas y verificaciones. En este método, la acción proporcional es el control principal, mientras que las acciones integrales y derivadas la refinan. La ganancia del controlador, K c, se ajusta con las acciones integrales y derivadas mantenidas al mínimo, hasta obtener una salida deseada.
A continuación se presentan algunos valores comunes de K c, T i y T d utilizados en el control de flujo, niveles, presión o temperatura para cálculos de prueba y error.
Flujo
El control P o PI se puede utilizar con baja ganancia del controlador. Utilice el control PI para una mayor precisión con una alta actividad de integración. No se considera el control derivado debido a las rápidas fluctuaciones en la dinámica de flujo con mucho ruido.
K c = 0.4-0.65
T i = 6s
Nivel
Se puede usar el control P o PI, aunque el control PI es más común debido a imprecisiones incurridas debido a compensaciones en el control solo P. No se considera el control derivado debido a las rápidas fluctuaciones en la dinámica de flujo con mucho ruido.
El siguiente ajuste de P solo es tal que la válvula de control está completamente abierta cuando el recipiente está 75% lleno y completamente cerrado cuando el 25% está lleno, estando medio abierto cuando el 50% está lleno.
K c = 2
Sesgo b = 50%
Punto de ajuste = 50%
Para el control de PI:
K c = 2-20
T i = 1-5 min
Presión
La afinación aquí tiene un amplio rango de valores posibles de K c y T i para su uso en el control PI, dependiendo de si la medición de presión es en fase líquida o gaseosa.
K líquido c = 0.5-2
T i = 6-15 s
Gas
K c = 2-10
T i = 2-10 min
Temperatura
Debido a la respuesta relativamente lenta de los sensores de temperatura a los cambios dinámicos de temperatura, se utilizan controladores PID.
K c = 2-10
T i = 2-10 min
T d = 0-5 min
Curva de reacción del proceso
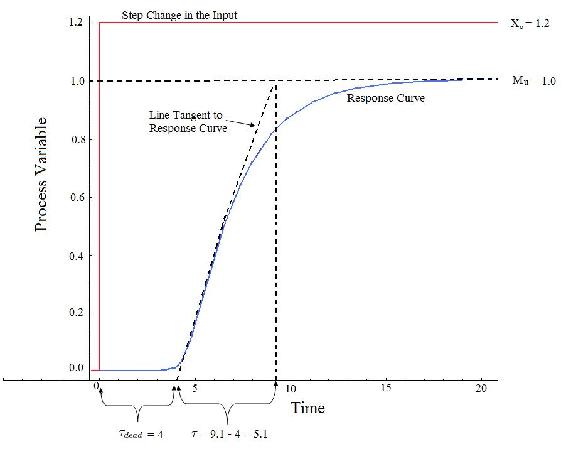
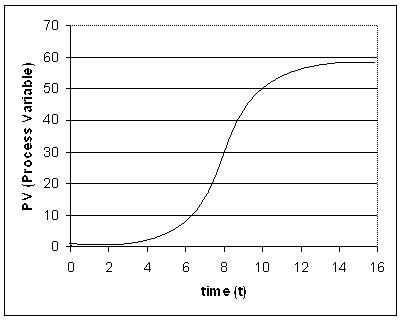
En este método, las variables que se miden son las de un sistema que ya está en su lugar. Se introduce una perturbación en el sistema y luego se pueden obtener datos de esta curva. Primero se permite que el sistema alcance el estado estacionario, y luego se le introduce una perturbación, X o,. El porcentaje de perturbación en el sistema puede ser introducido por un cambio en el punto de ajuste o en la variable de proceso. Por ejemplo, si tienes un termómetro en el que solo puedes girarlo hacia arriba o hacia abajo 10 grados, entonces elevar la temperatura en 1 grado sería una perturbación del 10% para el sistema. Este tipo de curvas se obtienen en sistemas de bucle abierto cuando no hay control del sistema, permitiendo que se registre la perturbación. El método de curva de reacción del proceso generalmente produce una respuesta a un cambio de función escalonada para el cual se pueden medir varios parámetros que incluyen: retraso de transporte o tiempo muerto, τ muerto, el tiempo para la respuesta al cambio, τ, y el valor final que alcanza la respuesta en constante -estado, M u.
τ muerto = retraso de transporte o tiempo muerto: el tiempo transcurrido desde el momento en que se introdujo la perturbación hasta el primer signo de cambio en la señal de salida
τ = el tiempo para que ocurra la respuesta
X o = el tamaño del cambio de paso
M u = el valor al que va la respuesta cuando el sistema vuelve al estado estacionario
\[R=\frac{\tau_{\text {dead}}}{\tau} \nonumber \]
\[K_{o}=\frac{X_{o}}{M_{u}} \frac{\tau}{\tau_{\text {dead}}} \nonumber \]
A continuación se muestra un ejemplo para determinar estos parámetros para una curva de respuesta de proceso típica a un cambio de paso.
Para encontrar los valores para τ muerto y τ, se dibuja una línea en el punto de inflexión que es tangente a la curva de respuesta y luego estos valores se encuentran a partir de la gráfica.
Para mapear estos parámetros a las constantes de control P, I y D, consulte los cuadros 2 y 3 a continuación en las secciones Z-N y Cohen Coon.
Método Ziegler-Nichols
En la década de 1940, Ziegler y Nichols idearon dos métodos empíricos para obtener parámetros de controlador. Sus métodos se utilizaron para situaciones de no primer orden más tiempo muerto, e involucraron intensos cálculos manuales. Con un software de optimización mejorado, la mayoría de los métodos manuales como estos ya no se utilizan. Sin embargo, incluso con las ayudas informáticas, los siguientes dos métodos todavía se emplean hoy en día, y se consideran entre los más comunes:
Método de sintonización de bucle cerrado Ziegler-Nichols
El método de sintonización de bucle cerrado de Ziegler-Nichols le permite utilizar el valor de ganancia final, K u, y el último período de oscilación, P u, para calcular K c. Es un método sencillo de sintonizar controladores PID y se puede refinar para dar mejores aproximaciones del controlador. Puede obtener las constantes del controlador K c, T i y T d en un sistema con retroalimentación. El método de sintonización de bucle cerrado Ziegler-Nichols se limita a procesos de ajuste que no pueden ejecutarse en un entorno de bucle abierto.
Determinar el valor de ganancia final, Ku, se logra encontrando el valor de la ganancia solo proporcional que hace que el bucle de control oscile indefinidamente en estado estacionario. Esto significa que las ganancias del controlador I y D se establecen en cero para que se pueda determinar la influencia de P. Se prueba la robustez del valor K c para que se optimice para el controlador. Otro valor importante asociado con este método de ajuste de control solo proporcional es el último periodo (P u). El último período es el tiempo requerido para completar una oscilación completa mientras el sistema está en estado estacionario. Estos dos parámetros, Ku y P u, se utilizan para encontrar las constantes de ajuste de bucle del controlador (P, PI o PID). Para encontrar los valores de estos parámetros, y para calcular las constantes de afinación, utilice el siguiente procedimiento:
Bucle cerrado (bucle de retroalimentación)
- Eliminar la acción integral y derivada. Establezca el tiempo integral (T i) en 999 o su valor más grande y establezca el controlador derivado (T d) en cero.
- Cree una pequeña perturbación en el bucle cambiando el punto de ajuste. Ajustar la ganancia proporcional, creciente y/o decreciente, hasta que las oscilaciones tengan amplitud constante.
- Registrar el valor de ganancia (K u) y el período de oscilación (P u).
4. Conecte estos valores en las ecuaciones de bucle cerrado Ziegler-Nichols y determine los ajustes necesarios para el controlador.
Cuadro 1. Cálculos de Circuito Cerrado de K c, T i, T d
Ventajas
- Experimento sencillo; solo es necesario cambiar el controlador P
- Incluye la dinámica de todo el proceso, lo que da una imagen más precisa de cómo se está comportando el sistema
Desventajas
- Experimentar puede llevar mucho tiempo
- Puede aventurarse en regiones inestables mientras prueba el controlador P, lo que podría hacer que el sistema se salga de control
Método de sintonización de bucle abierto Ziegler-Nichols o método de reacción de proceso:
Este método sigue siendo una técnica popular para sintonizar controladores que utilizan acciones proporcionales, integrales y derivadas. El método de bucle abierto Ziegler-Nichols también se conoce como método de reacción de proceso, ya que prueba la reacción de bucle abierto del proceso a un cambio en la salida de la variable de control. Esta prueba básica requiere que la respuesta del sistema sea registrada, preferiblemente por un plotter o computadora. Una vez que se encuentran ciertos valores de respuesta del proceso, se pueden conectar a la ecuación de Ziegler-Nichols con constantes multiplicadoras específicas para las ganancias de un controlador con acciones P, PI o PID.
Bucle abierto (lazo de avance de alimentación)
Para utilizar el método de sintonización de bucle abierto Ziegler-Nichols, debe realizar los siguientes pasos:
1. Hacer una prueba de paso de bucle abierto
2. A partir de la curva de reacción del proceso se determina el retraso de transporte o tiempo muerto, τ muerto, la constante de tiempo o tiempo para la respuesta al cambio, τ, y el valor final que la respuesta alcanza en estado estacionario, M u, para un cambio escalonado de Xo.
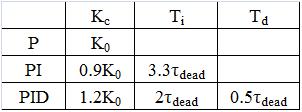
3. Determine las constantes de sintonización de bucle. Conecte los valores de velocidad de reacción y tiempo de retardo a las ecuaciones de sintonización de bucle abierto de Ziegler-Nichols para el controlador apropiado (P, PI o PID) para calcular las constantes del controlador. Utilice la siguiente tabla.
Cuadro 2. Cálculos en bucle abierto de K c, T i, T d
Ventajas
- Rápido y fácil de usar que otros métodos
- Es un método robusto y popular
- De estas dos técnicas, el Método de Reacción de Proceso es el más fácil y menos disruptivo de implementar
Desventajas
- Depende de la medición puramente proporcional para estimar los controladores I y D.
- Las aproximaciones para los valores K c, T i y T d podrían no ser del todo precisas para diferentes sistemas.
- No se sostiene para controladores I, D y PD
Método Cohen-Coon
El método Cohen-Coon de sintonización del controlador corrige la respuesta lenta de estado estacionario dada por el método Ziegler-Nichols cuando hay un tiempo muerto grande (retardo del proceso) relativo a la constante de tiempo de bucle abierto; es necesario un gran retardo de proceso para que este método sea práctico porque de lo contrario Se predecirán ganancias de controlador irrazonablemente grandes. Este método solo se usa para modelos de primer orden con retardo de tiempo, debido a que el controlador no responde instantáneamente a la perturbación (la perturbación escalonada es progresiva en lugar de instantánea).
El método Cohen-Coon se clasifica como un método “fuera de línea” para la sintonización, lo que significa que se puede introducir un cambio de paso a la entrada una vez que está en estado estacionario. Entonces la salida se puede medir en base a la constante de tiempo y el retardo de tiempo y esta respuesta se puede utilizar para evaluar los parámetros de control iniciales.
Para el método Cohen-Coon, hay un conjunto de ajustes predeterminados para obtener un desplazamiento mínimo y una relación de decaimiento estándar de 1/4 (QDR). Una relación de decaimiento de 1/4 (QDR) se refiere a una respuesta que tiene oscilaciones decrecientes de tal manera que la segunda oscilación tendrá 1/4 de la amplitud de la primera oscilación. Estos ajustes se muestran en la Tabla 3..
Cuadro 3. Ecuaciones estándar recomendadas para optimizar las predicciones de Cohen Coon
donde las variables P, N y L se definen a continuación.
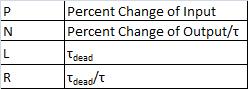
Alternativamente, se puede usar K 0 en lugar de (P/NL). K 0, τ y τ muertos se definen en la sección de la curva de reacción del proceso. Aquí se muestra un ejemplo usando estos parámetros [1].
El proceso en el método de torneado Cohen-Coon es el siguiente:
- Espere hasta que el proceso llegue al estado estacionario.
- Introducir un cambio de paso en la entrada.
- Con base en la salida, obtener un proceso aproximado de primer orden con una constante de tiempo τ retardada por τ unidades muertas desde que se introdujo el paso de entrada.
Los valores de τ y τ muertos se pueden obtener registrando primero las siguientes instancias de tiempo:
t0 = tiempo en el punto de inicio del paso de entrada t2 = tiempo cuando alcanza el medio punto t3 = tiempo cuando alcanza 63.2% punto
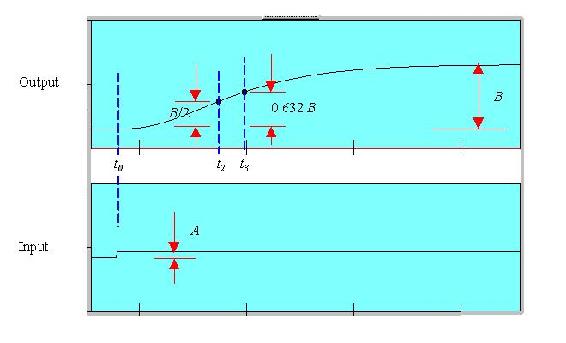
4. Usando las mediciones en t0, t2, t3, A y B, evalúe los parámetros del proceso τ, τ muerto y K o.
5. Encuentre los parámetros del controlador basados en τ, τ muerto y K o.
Ventajas
- Se utiliza para sistemas con retardo de tiempo.
- Tiempo de respuesta de bucle cerrado más rápido.
Desventajas y limitaciones
- Sistemas de bucle cerrado inestables.
- Solo se puede usar para modelos de primer pedido, incluidos grandes retrasos en el proceso.
- Método fuera de línea.
- Las aproximaciones para los valores K c, τ i y τ d podrían no ser del todo precisas para diferentes sistemas.
Otros métodos
Estos son otros métodos comunes que se utilizan, pero pueden ser complicados y no se consideran métodos clásicos, por lo que solo se discuten brevemente.
Control interno del modelo
El método de Control Interno de Modelos (IMC) se desarrolló teniendo en cuenta la robustez. Los métodos de bucle abierto Ziegler-Nichols y Cohen-Coon brindan una gran ganancia de controlador y un tiempo integral corto, lo que no es propicio para aplicaciones de ingeniería química. El método IMC se relaciona con el control de bucle cerrado y no tiene un comportamiento oscilatorio u excedente. Sin embargo, los métodos IMC son muy complicados para sistemas con tiempo muerto de primer orden.
Variación de sintonización automática
La técnica de variación de ajuste automático (ATV) también es un método de bucle cerrado y se utiliza para determinar dos constantes importantes del sistema (P u y K u por ejemplo). Estos valores se pueden determinar sin perturbar el sistema y a partir de estos se obtienen valores de sintonización para PID. El método ATV solo funcionará en sistemas que tengan un tiempo muerto significativo o el último período, P u, será igual al período de muestreo.
Eres un ingeniero de controles que trabaja para la compañía Flawless Design cuando tu controlador óptimo se descompone. Como respaldo, imaginas que al usar un conocimiento aproximado de un método clásico, es posible que puedas sostener el desarrollo del producto. Después de ajustar la ganancia a un conjunto de datos tomados de un controlador, encuentras que tu ganancia final es de 4.3289.
A partir de la gráfica ajustada a continuación, determine el tipo de bucle que representa esta gráfica; luego, calcule K c, T i y T d para los tres tipos de controladores.
Solución
Por el hecho de que esta gráfica oscila y no es una función de paso, vemos que se trata de un bucle cerrado. Así, los valores se calcularán en consecuencia.
Se nos da la ganancia definitiva, K u = 4.3289. De la gráfica a continuación, vemos que el último periodo a esta ganancia es P u = 6.28
A partir de esto, podemos calcular los K c, T i y T d para los tres tipos de controladores. Los resultados se tabulan a continuación. (Los resultados se calcularon a partir de las ecuaciones de bucle cerrado de Ziegler-Nichols).

Su socio encuentra otro conjunto de datos después de que el controlador se descompone y decide utilizar el método Cohen-Coon debido al lento tiempo de respuesta para el sistema. También notaron que el dial de control, que va de 0-8, se fijó en 3 en lugar de 1. Por suerte la curva de respuesta se obtuvo antes y se ilustra a continuación. A partir de estos datos quiso calcular K c, T i y T d. Ayúdale a determinar estos valores. Tenga en cuenta que el eje y es el cambio porcentual en la variable de proceso.
Solución
Para resolver para K c, T i y T d, primero se debe determinar L, ΔC p, y T. Todos estos valores pueden ser calculados por la curva de reacción dada.
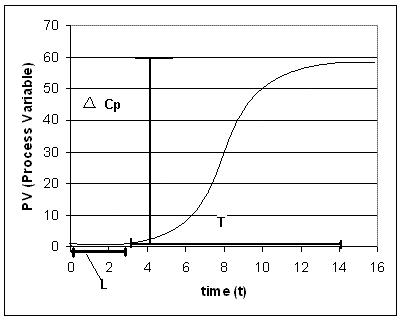
De la curva de reacción del proceso podemos encontrar que:
\(L = 3\)
\(T = 11\)
\(ΔC_p = 0.55\, (55%)\)
Ahora que se han encontrado estos tres valores N y R pueden calcularse usando las ecuaciones a continuación.
N =
R =
Usando estas ecuaciones encuentras que
N = .05
R = 0.27 También
sabemos que ya que el controlador se movió de 1 a 3, por lo que un cambio de 200%.
P = 2.00
Utilizamos estos valores para calcular K c, T i y T d, para los tres tipos de controladores con base en las ecuaciones que se encuentran en la Tabla 3.

Ajuste de los parámetros de un controlador PID en un sistema real
Hay varias formas de ajustar los parámetros de un controlador PID. Implican los siguientes procedimientos. Para cada uno, nombra el procedimiento y explica cómo se usa la información medida dada para elegir los parámetros del controlador PID.
- El controlador se establece en P solamente, y el sistema se opera en “bucle cerrado”, lo que significa que el controlador está conectado y funcionando. La ganancia se afina hasta obtener una resonancia. Se mide la amplitud y frecuencia de esa resonancia.
- El sistema se mantiene en modo de “bucle abierto”, y se realiza manualmente un cambio de función paso al sistema (a través de una perturbación o a través del propio controlador). La respuesta resultante del sistema se registra en función del tiempo.
Solución
a. Utilizaremos el método Ziegler-Nichols.
Ki=0.5Ku Ku es la ganancia final cuando el sistema comenzó a oscilar.
b. Utilizaremos el método Cohen-Coon.
Podemos localizar el punto de inflexión de la función step y dibujar una tangente. T5 muertos se localiza en el cruce de esa tangente con t, y T5 se localiza en la cruz de la tangente con M (t)
Ejercicio\(\PageIndex{1}\)
¿Cuál de los siguientes registros durante el Método Ziegler-Nichols?
- \(K_c\)
- \(τ_i\)
- \(K_o\)
- \(τ_d\)
- Responder
-
Respuesta:C
Ejercicio\(\PageIndex{2}\)
Para el Método Ziegler-Nichols, es importante:
- Encuentra una ganancia que produzca oscilación amortiguada
- Establecer controladores P e I a cero
- Registrar el periodo de oscilación
- Calcular T c
- Responder
-
Respuesta:A, C
Referencias
- Svrcek, William Y., Mahoney, Donald P., Young, Brent R. Un enfoque en tiempo real para el control de procesos, 2a Edición. John Wiley & Sons, Ltd.
- Astrom, Karl J., Hagglund, Tore., Control PID Avanzado, ISA, La Sociedad de Instrumentación, Sistemas y Automatización.
- “Afinación ACT Ziegler-Nichols”, ourworld.compuserve.com/homepages/actgmbh/zn.htm
- Ogata, Katsuhiko. Dinámica de sistemas, 4ª Edición. Pearson Education, Inc.