
3.7: Resumen y otros problemas
- Page ID
- 83027

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
En medio del cambio, encuentra lo que no cambia: la cantidad invariante o conservada. Encontrar estas cantidades simplifica los problemas: Nos centramos en las pocas cantidades que no cambian más que en las muchas formas en que las cantidades cambian. Una instancia de esta idea con amplia aplicación es un modelo de caja, donde debe salir lo que entra. Al elegir cajas adecuadas, podríamos estimar las lluvias y las fuerzas de arrastre, y comprender la elevación.
Ejercicio\(\PageIndex{1}\): Raindrop speed
Utilice la fuerza de arrastre\(F_{drag} \sim \rho A_{cs} v^{2}\) para estimar la velocidad terminal de una gota de lluvia típica con un diámetro de 0.5 centímetros. ¿Cómo podrías verificar la predicción?
Ejercicio\(\PageIndex{2}\): Average value of sin squared
Utilice la simetría para encontrar el valor promedio de sin 2 t sobre el intervalo t = [0,\(\pi\)].
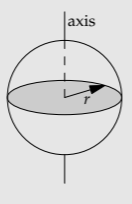
Ejercicio\(\PageIndex{3}\): Moment of inertia of a spherical shell
El momento de inercia de un objeto alrededor de un eje de rotación es
\[\sum{m_{i}d_{i}^{2}}\]
sumado sobre todos los puntos de masa i, donde d i es la distancia del punto desde un eje de rotación. Utilice la simetría para encontrar el momento de inercia de una concha esférica con masa m y radio r alrededor de un eje a través de su centro. ¡No deberías tener que hacer ninguna integral!
Ejercicio\(\PageIndex{4}\): Flying bicyclist
Estimar la envergadura que un ciclista campeón del mundo requeriría para obtener suficiente sustentación para el despegue.
Ejercicio\(\PageIndex{5}\): Maximum-gain frequency for a second-order system
En este problema, utiliza la simetría para maximizar la ganancia de un circuito LRC o un sistema de muelle-masa con amortiguación (usando la analogía de la Sección 2.4.1). La ganancia G, que es la relación de amplitud V salida/V in, depende de la frecuencia angular de la señal\(\omega\)
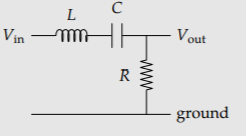
\[G(\omega) = \frac{\frac{j\omega}{\omega_{0}}}{1 + \frac{j}{Q} \frac{\omega}{\omega_{0}}-\frac{\omega^{2}}{\omega^{2}_{0}}}\]
donde\(j = \sqrt{-1}\),\(\omega_{0}\) es la frecuencia natural del sistema, y Q, el factor de calidad, es una medida adimensional de la amortiguación. No te preocupes de dónde viene la fórmula de ganancia: Puedes derivarla usando el método de impedancia (Problema 2.22), pero el propósito de este problema es maximizar su magnitud\(| G (\omega)|\). Hazlo encontrando una operación de simetría sobre\(\omega\) eso deja\(|G(\omega)|\) invariante.
Ejercicio\(\PageIndex{6}\): Runway length
Estimar la longitud de pista requerida por un 747 para poder despegar.
Ejercicio\(\PageIndex{7}\): Hovering versus flying
¿A qué velocidad de vuelo de avance requiere el colibrí de la Sección 3.6.1 tanta energía para generar sustentación como para flotar? ¿Cómo se compara esta velocidad con su velocidad de vuelo típica?
Ejercicio\(\PageIndex{8}\):Resistive grid
En una cuadrícula infinita de resistencias de 1 ohmio, ¿cuál es la resistencia medida a través de una resistencia?
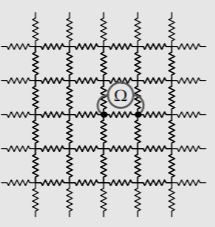
Para medir la resistencia, un ohmímetro inyecta una corriente I en un terminal (por simplicidad, imagínese que I = 1 amperio). Elimina la misma corriente del otro terminal, y mide la diferencia de voltaje resultante V entre los terminales. La resistencia es R=V/I.
Pista: Usa simetría. ¡Pero sigue siendo un problema duro!
Ejercicio\(\PageIndex{9}\): Inertia tensor
Aquí hay un tensor de inercia (la generalización del momento de inercia) de un objeto en particular, calculado en un sistema de coordenadas mal elegido (pero cartesiano):
\[\left (\begin{array}{ccc} 4 & 0 & 0 \\ 0 & 5 & 4 \\ 0 & 4 & 5 \end{array} \right) \]
a. Cambiar el sistema de coordenadas a un conjunto de ejes principales, donde el tensor de inercia tiene la forma diagonal
\[ \left (\begin{array}{ccc} I_{xx} & 0 & 0 \\ 0 & I_{yy} & 0 \\ 0 & 0 & I_{zz} \end{array} \right) \]
y dar los principales momentos de inercia I xx, I yy, y I zz. Consejo: ¿Qué propiedades de una matriz son invariantes al cambiar los sistemas de coordenadas?
b. Dar un ejemplo de un objeto con un tensor de inercia similar. Pregunta retórica: ¿En qué sistema de coordenadas es más fácil pensar en tal objeto?
Este problema se inspiró en un problema en el examen de calificación escrita de física durante mis días como estudiante de doctorado. El problema requirió diagonalizar un tensor de inercia, y hubo muy poco tiempo para rederivar o incluso aplicar las fórmulas de cambio de base. ¡La presión del tiempo a veces empuja a uno hacia mejores soluciones!
Ejercicio\(\PageIndex{10}\): Temperature distribution on an infinite sheet
En esta hoja infinita y uniforme, el eje x se mantiene a temperatura cero, y el eje y se mantiene a temperatura unitaria (T= 1). Encuentra la temperatura en todas partes (¡excepto el origen!). Usa coordenadas cartesianas\(T(x,y)\) o coordenadas polares\(T(r, \theta)\), cualquiera que sea la elección, facilita la descripción de la temperatura.
