
5.0: Preludio para el diseño de sistemas de control con locus radicular
- Page ID
- 84921
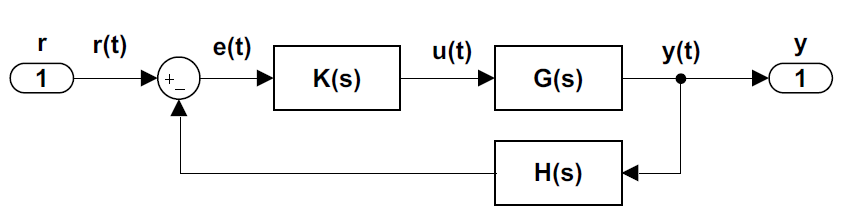
La estructura típica de un sistema de control de retroalimentación (Figura 5.0.1) incluye el proceso a controlar, representado por\(G(s)\), un sensor que mide la salida, representado por\(H\left(s\right)\), y un controlador en cascada, representado por\(K(s)\). Se supone que la planta es del tipo de entrada única y salida única (SISO).
Suponiendo que se selecciona un controlador de ganancia estática, el polinomio característico incluye la ganancia del controlador\(K\),, como parámetro. El locus raíz (RL) se refiere al locus de las raíces de bucle cerrado ya que la ganancia del controlador,\(K\), varía de\(0\to \infty\). La técnica del locus raíz permite la representación gráfica de ubicaciones de polos de bucle cerrado alcanzables.
La gráfica RL en el caso de modelos de planta de bajo orden se puede esbozar a mano siguiendo un conjunto de reglas; una gráfica generada por computadora se puede obtener de MATLAB. La ganancia del controlador necesaria para lograr un conjunto de especificaciones de diseño se puede seleccionar de la gráfica RL. En MATLAB, la ganancia del controlador se puede leer haciendo clic en la gráfica RL.
El sistema de control de retroalimentación está diseñado para la estabilidad de bucle cerrado y las mejoras deseadas de respuesta transitoria y/o de estado estacionario. Las mejoras de respuesta transitoria se miden en términos de parámetros de respuesta escalonada (\(t_r,\ t_s,\ \%OS,\)etc.); las mejoras de respuesta en estado estacionario se miden en términos de constantes de error relevantes (\(K_p,\ K_v\)).
La gráfica de locus raíz de una función de transferencia de bucle dada\(KGH(s)\),, constituye\(n\) ramas en el\(s\) plano complejo, donde\(n\) está el orden del polinomio denominador. Estas ramas comiencen en los polos de bucle abierto (OL) y avanzan hacia ceros finitos de la función de transferencia de bucle, o asintóticamente hacia el infinito. Todas las parcelas de locus raíz tienen características comunes que se denominan reglas de locus raíz. Estos describen la ubicación del locus del eje real, puntos de ruptura, direcciones de asíntotas, etc.
La técnica de diseño de locus raíz se puede extender a controladores dinámicos de tipo phase lead, phase lag, lead—lag, PD, PI y PID. El controlador dinámico introduce polos y ceros que modifican el RL original para lograr las mejoras de diseño deseadas. Con la disponibilidad de sensores de velocidad (giroscopio de velocidad y tacómetro), se puede considerar el diseño de retroalimentación de velocidad que incluye el diseño de bucles de retroalimentación internos y externos.
Los controladores estáticos y dinámicos diseñados para la mejora de procesos se pueden implementar con circuitos electrónicos construidos con amplificadores operativos, resistencias y condensadores. Alternativamente, se puede considerar la realización del controlador usando microcontroladores. Este tema se aborda en el siguiente capítulo después de la introducción de los sistemas de datos muestreados.