
6.0: Preludio al diseño del compensador con métodos de respuesta de frecuencia
- Page ID
- 84852
Los métodos de respuesta de frecuencia para diseñar compensadores para sistemas de control de retroalimentación son anteriores al locus raíz y a los métodos de dominio de tiempo (variable de estado). Se han utilizado de manera efectiva para diseñar amplificadores y filtros en el caso de redes eléctricas, y análisis de vibraciones en el caso de sistemas mecánicos.
El diseño de sistemas de control utilizando el método de respuesta en frecuencia requiere conocimiento de\(KGH(j\omega )\). Estrictamente hablando, no se necesita el conocimiento de la función\(G(s)\) de transferencia de plantas. En ausencia de un modelo matemático, la función de transferencia de planta puede ser identificada a partir de mediciones empíricas de la respuesta de frecuencia,\(G(j\omega )\).
La respuesta de frecuencia de un sistema se puede graficar de múltiples maneras. Las dos representaciones más comunes son: [GrindeQ__1_] la trama Bode y [GrindeQ__2_] la trama Nyquist o Polar. La respuesta de frecuencia de bucle cerrado puede visualizarse en el gráfico de Nichol.
El diseño de respuesta de frecuencia busca impartir un cierto grado de estabilidad relativa, medido por márgenes de ganancia y fase, al bucle de control de retroalimentación. La estabilidad del sistema de bucle cerrado se determina alternativamente utilizando el célebre criterio Nyquist.
La ganancia máxima en la respuesta de frecuencia de bucle cerrado es una medida de la estabilidad relativa; cuanto mayor es el pico, menor es la estabilidad relativa. La frecuencia de cruce en la gráfica de magnitud Bode y el ancho de banda en la respuesta de frecuencia de bucle cerrado definen medidas de velocidad de respuesta en el dominio del tiempo.
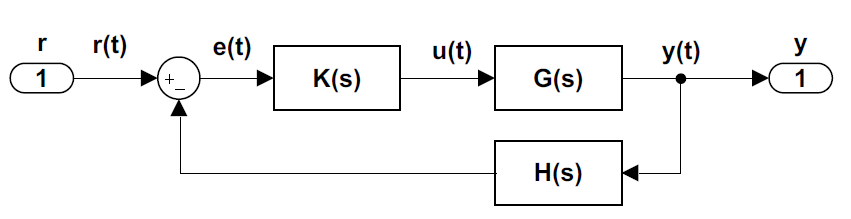
Consideramos la configuración estándar del sistema de control de retroalimentación (Figura 6.1) que incluye una planta\(G(s)\)\(H(s)\), un sensor y un controlador\(K(s)\). A menos que se indique lo contrario, se asume la retroalimentación de ganancia de unidad (\(H\left(s\right)=1\)).
A continuación, primero revisamos el trazado de la respuesta de frecuencia y las métricas de rendimiento asociadas. Posteriormente, discutiremos la modificación de la respuesta de frecuencia mediante la adición de compensadores phase lead, phase lag, lead—lag, PD, PI y PID al bucle de control.