
9.3: Diseño de controlador PI de seguimiento
- Page ID
- 84832

Diseño de controlador PI de seguimiento
El diseño del sistema de seguimiento mediante el uso de una ganancia de avance para cancelar el error de seguimiento no es robusto a los cambios en los parámetros de la planta. Un diseño robusto del sistema de seguimiento requiere la adición de un integrador al bucle de retroalimentación (Figura 9.3.1).
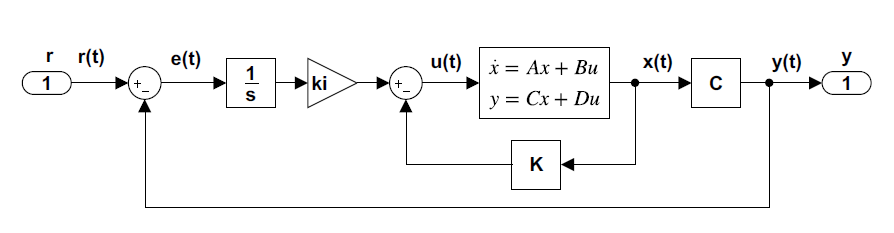
Una ley de control de tipo proporcional-integral (PI) que usa retroalimentación estatal se define como:\[u(t)=-{\bf k}^{T} {\bf x}(t)+k_{i} \int (r-y)\rm dt\] donde\(k_\rm i\) representa la ganancia integral. El integrador opera con la señal de error:\(e=r-y\). El controlador integral fuerza la señal de error a cero en el estado estacionario.
Dejar\(x_a (t)\) denotar la salida del integrador; entonces, la ecuación del estado del integrador se da como:\[\dot{x}_a =r-y=r-{\bf c}^{T} {\bf x}\]
Un modelo de sistema incrementado se forma agregando la salida del integrador al conjunto de variables de estado; el modelo resultante con\(n+1\) variables se describe como:
\[\left[\begin{array}{c} {\dot{\bf x}} \\ {\dot{x}_a } \end{array}\right]=\left[\begin{array}{cc} {\bf A} & {0} \\ {-{\bf c}^T } & {0} \end{array}\right]\left[\begin{array}{c} {x} \\ {x_a } \end{array}\right]+\left[\begin{array}{c} {\bf b} \\ {0} \end{array}\right]u+\left[\begin{array}{c} {\bf 0} \\ {1} \end{array}\right]r\]
Una ley de control de retroalimentación estatal para el modelo de sistema aumentada se define como:
\[u=\left[-\begin{array}{cc} {{\bf k}^T } & {k_\rm i } \end{array}\right]\, \left[\begin{array}{c} {\bf x} \\ {x_a } \end{array}\right],\]
La sustitución de la ley de control en el modelo de sistema aumentada define el sistema de bucle cerrado:
\[\left[\begin{array}{c} {\dot{\bf x}} \\ {\dot{x}_a } \end{array}\right]=\left[\begin{array}{cc} {{\bf A-bk}^T } & {{\bf b}k_{i} } \\ {-{\bf c}^T } & {0} \end{array}\right]\left[\begin{array}{c} {\bf x} \\ {x_a } \end{array}\right]+\left[\begin{array}{c} {\bf 0} \\ {1} \end{array}\right]r\]
El polinomio característico de bucle cerrado se forma como:\(\Delta _{a} (s)=\left|\begin{array}{cc} {s{\bf I-A+bk}^T } & {-{\bf b}k_{i} } \\ {{\bf c}^T} & {s} \end{array}\right|,\) donde\(\bf I\) denota una matriz de identidad de orden\(n\).
A continuación, elegimos un polinomio característico de\((n+1)\) orden deseado\({\mathit{\Delta}}_{des}\left(s\right)\), y realizamos el diseño de colocación de polos en el sistema incrementado. La ubicación del polo integrador se puede ajustar por prueba y error manteniendo a la vista el tiempo de asentamiento deseado del sistema.
Ejemplos
Ejemplo\(\PageIndex{1}\)
El modelo de variable de estado de un sistema masa-resorte-amortiguador se da como:
\[\frac{\rm d}{\rm dt} \left[\begin{array}{c} {x} \\ {v} \end{array}\right]=\left[\begin{array}{cc} {0} & {1} \\ {-10} & {-1} \end{array}\right]\left[\begin{array}{c} {x} \\ {v} \end{array}\right]+\left[\begin{array}{c} {0} \\ {1} \end{array}\right]f, \;\;x=\left[\begin{array}{cc} {1} & {0} \end{array}\right]\left[\begin{array}{c} {x} \\ {v} \end{array}\right]\]
Se desea tener menos de\(10\%\) sobreimpulso y cero error de estado estacionario a una entrada de paso.
Para realizar el diseño de control integral, se forma un modelo de variable de estado aumentada como:
\[\frac{\rm d}{\rm dt} \left[\begin{array}{c} {x} \\ {v} \\ {x_a } \end{array}\right]=\left[\begin{array}{ccc} {0} & {1} & {0} \\ {-10} & {-1} & {0} \\ {-1} & {0} & {0} \end{array}\right]\left[\begin{array}{c} {x} \\ {v} \\ {x_a } \end{array}\right]+\left[\begin{array}{c} {0} \\ {1} \\ {0} \end{array}\right]u+\left[\begin{array}{c} {0} \\ {0} \\ {1} \end{array}\right]r.\]
La ley de control para el sistema incrementado se da como:\(u=-k_{1} x-k_{2} v+k_{i} \int (r-x)\rm dt\).
El polinomio característico del sistema de bucle cerrado se forma como:\(\Delta (s)=s^{3} +(k_{2} +1)s^{2} +(k_{1} +10)s+k_{i} .\) Que se seleccione un polinomio característico deseado de tercer orden como:\(\Delta _{\rm des} (s)=(s+2)(s^{2} +4s+10)\).
Al comparar los coeficientes polinomiales, las ganancias del controlador se obtienen como:\(k_{1} =8,k_{2} =5,\; k_{i} =20.\) La ley de control resultante se da como:\(f=-8x-5v+20\int \left(r-y\right)dt\).
La respuesta escalonada del sistema de bucle cerrado se muestra en la Fig. 9.3.1 para tres valores diferentes de ganancia integral.
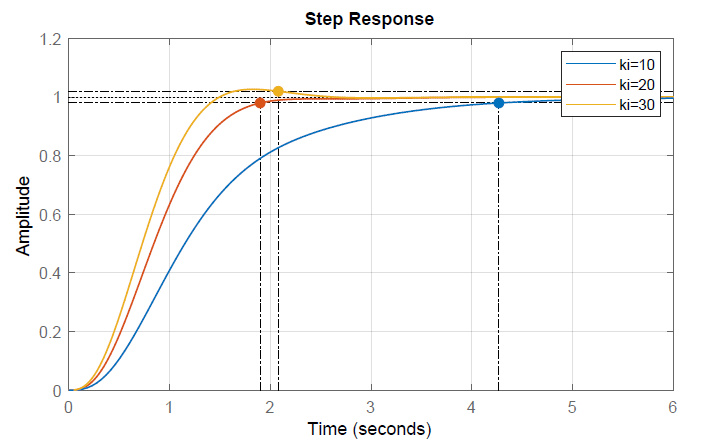 Figura\(\PageIndex{1}\): tep response of the mass-spring-damper system with integrator in the loop.
Figura\(\PageIndex{1}\): tep response of the mass-spring-damper system with integrator in the loop.Ejemplo\(\PageIndex{2}\)
El modelo de variable de estado de un motor de CC se da como:
\[\frac{\rm d}{\rm dt} \left[\begin{array}{c} {i_a } \\ {\omega } \end{array}\right]=\left[\begin{array}{cc} {-100} & {-5} \\ {5} & {-10} \end{array}\right]\left[\begin{array}{c} {i_a} \\ {\omega } \end{array}\right]+\left[\begin{array}{c} {100} \\ {0} \end{array}\right]V_a , \;\;\omega =\left[\begin{array}{cc} {0} & {1} \end{array}\right]\left[\begin{array}{c} {i_a } \\ {\omega } \end{array}\right]\]
Supongamos que las especificaciones de diseño requieren un bajo sobreimpulso a la respuesta escalonada y un tiempo de asentamiento,\(t_s\cong 0.1 \rm s\).
La ley de control para el controlador PI de rastreo se da como:\(u=-k_{1} i_{a} -k_{2} \omega +k_{i} \int (r-\omega )\rm dt\).
El modelo de sistema incrementado para colocación de postes mediante control integral se obtiene como:
\[\frac{\rm d}{\rm dt} \left[\begin{array}{c} {i_a } \\ {\omega } \\ {x_a } \end{array}\right]=\left[\begin{array}{ccc} {-100} & {-5} & {0} \\ {5} & {-10} & {0} \\ {0} & {-1} & {0} \end{array}\right]\left[\begin{array}{c} {i_a } \\ {\omega } \\ {x_a } \end{array}\right]+\left[\begin{array}{c} {100} \\ {0} \\ {0} \end{array}\right]u+\left[\begin{array}{c} {0} \\ {0} \\ {1} \end{array}\right]r\]
El polinomio característico resultante se da como:
\[\Delta (s)=s^{3} +\left(100k_{1} +100\right)s^{2} +\left(1000k_{1} +500k_{2} +1025\right)s-500k_{i} .\]
Elegimos un polinomio característico deseado como:\({\mathit{\Delta}}_{des}\left(s\right)=\left(s+50\right)\left(s^2+100s+5,000\right)\). Las raíces de bucle cerrado se encuentran en:\(s=\; -50,\; -50\pm j50\).
El controlador de seguimiento se define como:\(V_a\left(s\right)=-0.4\,i_a(t)-17.2\,\omega (t)+500\int (r-\omega )dt\).
Para la comparación, se ha diseñado un controlador PI en cascada para el modelo de función de transferencia del motor de CC\(\zeta=0.7\). El controlador PI se da como:\(K(s)=\frac{10(s+10)}{s}\). Las raíces de bucle cerrado se colocan en:\(s=-9.94, -50\pm j50.3\).
La respuesta escalonada del sistema de bucle cerrado para los controladores PI de rastreo y cascada se muestra en la Fig. 9.3.2. Ambos controladores logran el tiempo de sedimentación deseado.
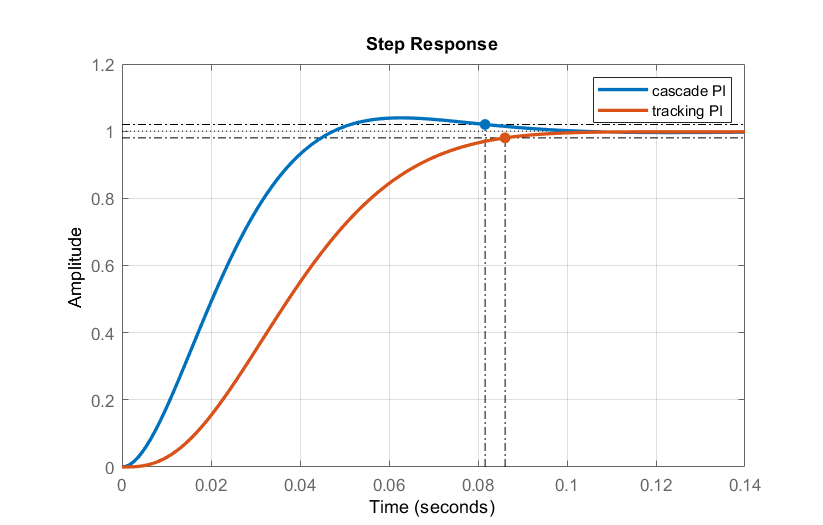
Figura\(\PageIndex{2}\): La respuesta escalonada del modelo de motor de CC para controladores PI en cascada y seguimiento.