
1.1: Inteligencia y Encarnación
- Page ID
- 85048

Nuestra noción de “comportamiento inteligente” está fuertemente sesgada por nuestra comprensión del cerebro y cómo funcionan las computadoras: la inteligencia se encuentra en nuestras cabezas. De hecho, sin embargo, mucho comportamiento que parece inteligente se puede lograr por medios muy simples. Por ejemplo, los juguetes mecánicos de enrollamiento pueden evitar caerse de un borde simplemente usando una rueda de mosca que gira en ángulo recto con respecto a su dirección de movimiento y una rueda giratoria. Una vez que la rueda giratoria pierde contacto con el suelo, es decir, el robot ha llegado al borde, la rueda de mosca patea y tira del robot hacia la derecha (Figura 1.1).
Un robot aspirador podría resolver el mismo problema de manera muy diferente: emplea sensores infrarrojos que apuntan hacia abajo para detectar bordes como escaleras y luego emite un comando para hacer un giro de evitación. Una vez que la electrónica está a bordo, este es un enfoque mucho más eficiente, aunque mucho más complejo.
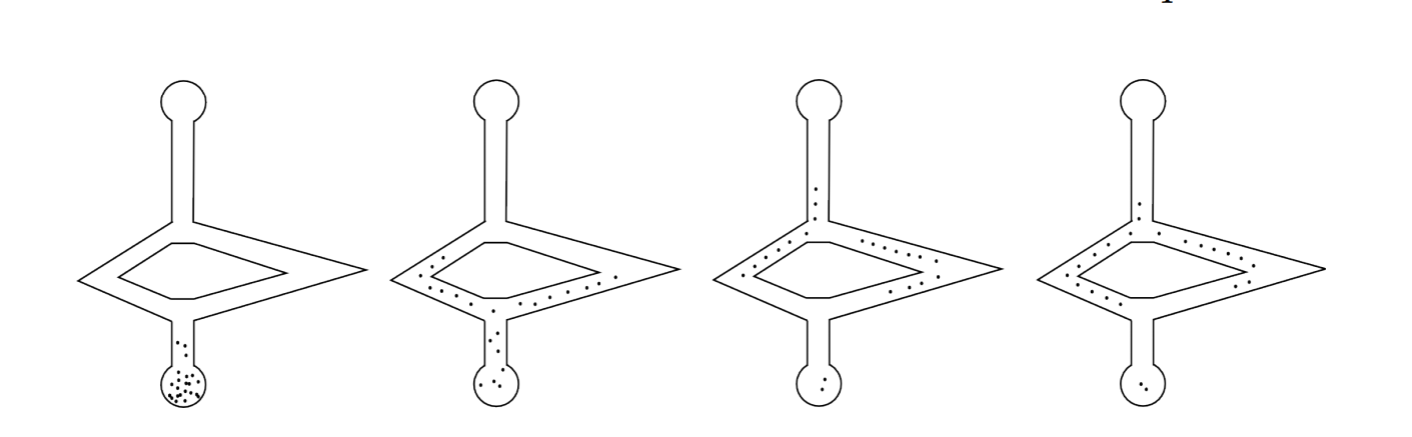
Mientras que los ejemplos anteriores proporcionan diferentes enfoques para implementar comportamientos inteligentes, existen compensaciones similares para la planificación robótica. Por ejemplo, las hormigas pueden encontrar el camino más corto entre su nido y una fuente de alimento simplemente eligiendo el rastro que ya tiene más feromonas, los químicos con los que se comunican las hormigas, en él. Como los caminos más cortos tienen hormigas que no solo se mueven más rápido hacia la comida, sino que también regresan más rápido, sus rastros de feromonas se construyen más rápido (Figura 1.2). Pero las hormigas no están pegadas a esta solución. De vez en cuando, las hormigas le dan otra oportunidad al camino más largo, eventualmente encontrando nuevas fuentes de alimento
Lo que parece un comportamiento inteligente a nivel de enjambre, se logra esencialmente mediante un sensor de feromonas que ocasionalmente falla. Un robot industrial moderno resolvería el problema completamente diferente: primero adquiriría alguna representación del entorno en forma de un mapa poblado de obstáculos, y luego planificaría un camino usando un algoritmo. Qué solución para lograr un cierto comportamiento deseado es la mejor depende de los recursos que estén disponibles para el diseñador. Ahora estudiaremos un problema más elaborado para el que existen muchas soluciones, más o menos eficientes.