
5.7: Terminología
- Page ID
- 84980

Ahora es el momento de introducir una definición más precisa de términos como “velocidad” y “resolución”, así como taxonomía adicional que se utiliza en un contexto robótico.
Los roboticistas diferencian entre sensores activos y pasivos. Los sensores activos emiten energía de algún tipo y miden la reacción del ambiente. En cambio, los sensores pasivos miden la energía del entorno. Por ejemplo, la mayoría de los sensores de distancia son sensores activos (ya que detectan el reflejo de una señal que emiten), mientras que un acelerómetro, brújula o un pulsador son sensores pasivos.
La diferencia entre el límite superior e inferior de la cantidad que un sensor puede medir su conocida como su rango. Esto no debe confundirse con el rango dinámico, que es la relación entre el valor más alto y el más bajo que un sensor puede medir. Por lo general, se expresa en una escala logarítmica (a la base 10), también conocida como “decibelios”. La distancia mínima entre dos valores que un sensor puede medir se conoce como su resolución. La resolución de un sensor viene dada por la física del dispositivo (por ejemplo, un detector de luz solo puede contar múltiplos de un cuantitativo), pero generalmente limitado por el proceso de conversión analógico-digital. La resolución de un sensor no debe confundirse con su precisión o su precisión (que son dos conceptos diferentes). Por ejemplo, mientras que un sensor de distancia infrarrojo podría producir 4096 valores diferentes para codificar distancias de 0 a 10cm, lo que sugiere una resolución de alrededor de 24 micrómetros, su precisión está muy por encima de esa (en el orden de milímetros) debido al ruido en el proceso de adquisición.
Técnicamente, la precisión de un sensor viene dada por la diferencia entre la salida m (promedio) de un sensor y el valor verdadero v:
\[accuracy=1-\frac{\left | m-v \right |}{v}\]
Esta medida le proporciona una cantidad que se acerca a uno para valores muy precisos y cero si las mediciones se agrupan lejos de la media real. En la práctica, sin embargo, esta medida sólo se utiliza raramente y se proporciona precisión con valores absolutos o un porcentaje en el que un valor podría exceder la medición verdadera.
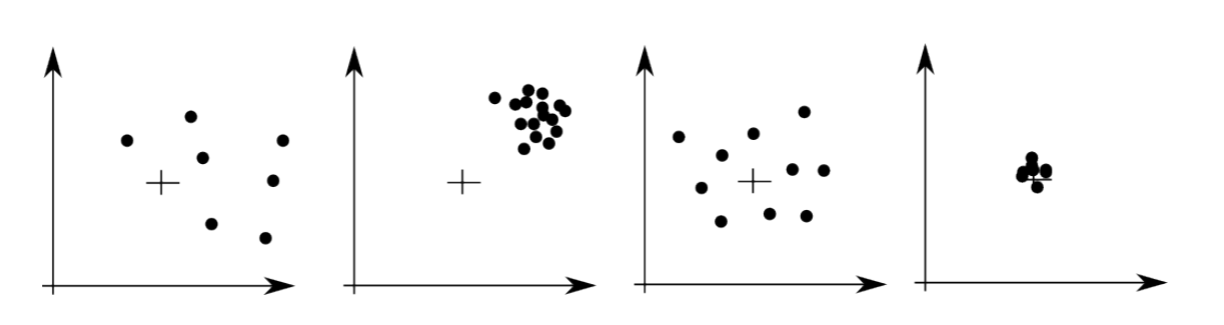
La precisión de un sensor viene dada por la relación de rango y varianza estadística de la señal. Por lo tanto, la precisión es una medida de repetibilidad de una señal, mientras que la precisión describe un error sistemático que es introducido por la física del sensor. Esto se ilustra en la Figura 5.7.1.
Un sensor GPS suele ser preciso dentro de unos pocos metros, pero solo con una precisión de decenas de metros. Esto se vuelve más obvio cuando cambian las configuraciones de los satélites, lo que resulta en que la región precisa salte un par de metros. En la práctica, esto se puede evitar fusionando estos datos con otros sensores, por ejemplo, de una IMU.
La velocidad a la que un sensor puede proporcionar mediciones se conoce como su ancho de banda. Por ejemplo, si un sensor tiene un ancho de banda de 10 Hz, proporcionará una señal diez veces por segundo. Esto es importante saberlo, ya que consultar el sensor con más frecuencia es una pérdida de tiempo computacional y potencialmente engañoso.