
17.1: Una introducción a los robots móviles autónomos
- Page ID
- 84848

Esto describe un posible plan de estudios semestral, que lleva a los estudiantes de la cinemática de una plataforma de rueda diferencial a SLAM. Este plan de estudios está involucrado y requiere una sólida formación en trigonometría, teoría de probabilidad y álgebra lineal. Esto podría ser demasiado ambicioso para los estudiantes de tercer año de Ciencias de la Computación, pero les va bien con los estudiantes de Ingeniería Aeroespacial y Eléctrica, que a menudo tienen una formación matemática más sólida y aplicada. Por lo tanto, este plan de estudios también es adecuado como “clase avanzada”, por ejemplo, en el cuarto año de un plan de estudios de CS.
17.1.1. Descripción general
El plan de estudios está motivado por una competencia de resolución de laberinto que se describe en la Sección 1.3. Resolver el juego se puede lograr usando una variedad de algoritmos que van desde el seguimiento de la pared (que requiere un control proporcional simple) hasta la búsqueda en profundidad primero en el laberinto hasta el SLAM completo. Aquí, las reglas están diseñadas de tal manera que crear un mapa del entorno conduzca a una ventaja competitiva a largo plazo.
17.1.2. Materiales
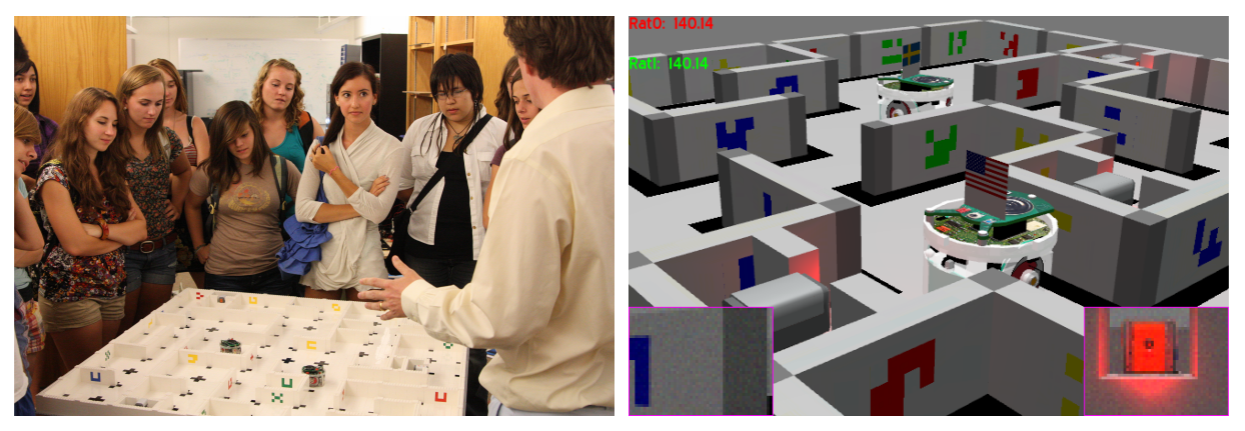
La competencia puede recrearse fácilmente usando cartulina o ladrillos LEGO y cualquier plataforma de rueda diferencial en miniatura que esté equipada con una cámara para reconocer marcadores simples en el entorno (que sirven como puntos de referencia para SLAM). La configuración también se puede simular fácilmente en un entorno de simulación basado en la física, lo que permite escalar este plan de estudios a un gran número de participantes. La configuración utilizada en CU Boulder usando el robot e-Puck y el simulador Webots se muestra en la Figura 17.1.1.
17.1.3. Contenido
Después de introducir el campo y el plan de estudios utilizando el Capítulo 1 “Introducción”, se puede dedicar otra semana a conceptos básicos del Capítulo 2 “Locomoción y Manipulación”, que incluye conceptos como “Estabilidad Estática y Dinámica” y “Gradosde-Libertad”. Las porciones de laboratorio de la clase se pueden usar en este momento para introducir el software y el hardware utilizados en la competencia. Por ejemplo, los estudiantes pueden experimentar con el entorno de programación del robot real o configurar un mundo simple en el simulador ellos mismos.
La conferencia puede entonces tomar ritmo con el Capítulo 3. Aquí, los temas “Sistemas de coordenadas y marcos de referencia”, “Cinemática delantera de un robot de ruedas diferenciales” y “Cinemática inversa de robots móviles” están en la ruta crítica, mientras que otras secciones del Capítulo 3 son opcionales. Cabe mencionar que la cinemática hacia adelante de plataformas no holonómicas, y en particular la motivación para considerar su tratamiento en velocidad más que espacio de posición, no son sencillas y por lo tanto se recomienda al menos algún tratamiento de la cinemática del brazo. Estos conceptos se pueden convertir fácilmente en experiencia práctica durante la sesión de laboratorio.
La capacidad de implementar movimientos punto a punto en el espacio de configuración gracias al conocimiento de la cinemática inversa, se presta directamente a “representaciones de mapa” y “Planificación de trayectorias” tratadas en el Capítulo 4. Con el propósito de resolver laberintos, algoritmos simples como Dijkstra y A* son suficientes, y se pueden omitir enfoques basados en muestreo. La implementación de un algoritmo de planificación de rutas tanto en simulación como en el robot real proporcionará experiencia de primera mano de incertidumbre.
La conferencia puede entonces proceder a “Sensores” (Capítulo 5), que deben ser utilizados para motivar la incertidumbre utilizando conceptos como la exactitud y la precisión. Estos conceptos se pueden formalizar utilizando materiales del Capítulo C “Estadísticas”, y cuantificarse durante el laboratorio. Aquí, hacer que los alumnos registren el histograma de las distribuciones de ruido de los sensores es un ejercicio valioso.
Los capítulos 6 y 7, que están sobre “Visión” y “Extracción de características”, no necesitan extenderse más allá de lo necesario para comprender e implementar algoritmos simples para detectar las características únicas en el entorno del laberinto. En la práctica, estos generalmente se pueden detectar usando filtros básicos basados en convolución del Capítulo 6, y un simple post-procesamiento, introduciendo la noción de una “característica”, pero sin revisar detectores de características de imagen más complejos. La porción de laboratorio de la clase debe estar dirigida a identificar marcadores en el ambiente, y puede ser andamiado tanto como sea necesario.
La experimentación en profundidad con sensores, incluida la visión, sirve como base para un tratamiento más formal de la incertidumbre en el Capítulo 8 “Incertidumbre y Propagación de Errores”. Dependiendo de si el ejemplo “Ejemplo: Ajuste de línea” ha sido tratado en el Capítulo 7, se puede usar aquí para demostrar la propagación de errores a partir de la incertidumbre del sensor, y debería simplificarse de otra manera. En el laboratorio, los estudiantes pueden medir la distribución de la posición del robot en cientos de pruebas individuales (este es un ejercicio que se puede hacer colectivamente si hay suficiente hardware disponible) y verificar sus matemáticas usando estas observaciones. Alternativamente, se puede proporcionar código para realizar estos experimentos, dando a los estudiantes más tiempo para ponerse al día.
El problema de localización introducido en el Capítulo 9 se introduce mejor con la localización de Markov, de la cual se pueden derivar conceptos más avanzados como el filtro de partículas y el filtro de Kalman. La realización de estos experimentos en el laboratorio está involucrada, y se realiza mejor en simulación, lo que permite formas limpias de visualizar las distribuciones de probabilidad cambiando.
La conferencia puede concluirse con “EKF SLAM” en el Capítulo 11. En realidad implementar EKF SLAM está más allá del alcance de una clase de robótica de pregrado y es lograda sólo por muy pocos estudiantes que van más allá del call of duty. En cambio, los estudiantes deben ser capaces de experimentar el funcionamiento del algoritmo en simulación, por ejemplo, usando una de las muchas implementaciones disponibles de Matlab, o andamiados en la plataforma experimental por el instructor.
La porción de laboratorio de la clase puede concluirse con una competencia en la que los equipos estudiantiles compiten entre sí. En la práctica, los equipos ganadores se diferencian por la implementación más rigurosa, a menudo usando uno de los algoritmos menos complejos, por ejemplo, seguimiento de muro o exploración simple. Aquí, le corresponde al instructor incentivar un enfoque deseado.
Dependiendo del ritmo de la clase en la conferencia así como del tiempo que el instructor desee reservar para la implementación del proyecto final, las conferencias pueden ser compensadas por debates, como se describe en la Sección 17.3.