
1.3: Momentos
- Page ID
- 83994

Un momento (también llamado a veces par) se define como la “tendencia de una fuerza a girar un cuerpo”. Donde las fuerzas causan aceleraciones lineales, los momentos provocan aceleraciones angulares. De esta manera los momentos, pueden pensarse como fuerzas de torsión.
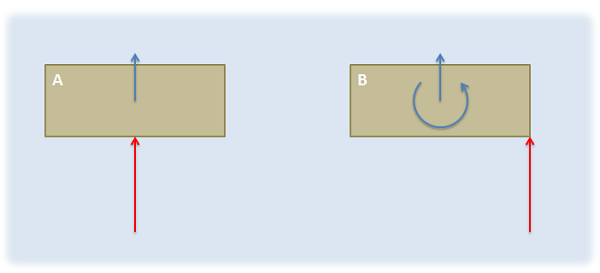
La representación vectorial de un momento:
Los momentos, como las fuerzas, se pueden representar como vectores y tienen una magnitud, una dirección y un “punto de aplicación”. Por momentos sin embargo un mejor nombre para el punto de aplicación es el eje de rotación. Este será el punto o eje sobre el cual determinaremos todos los momentos.
Magnitud:
La magnitud de un momento es el grado en que el momento provocará una aceleración angular en el cuerpo sobre el que está actuando. Está representado por un escalar (un solo número). La magnitud del momento puede pensarse como la fuerza de la fuerza de torsión ejercida sobre el cuerpo. Cuando un momento se representa como un vector, la magnitud del momento suele etiquetarse explícitamente. Aunque la longitud del vector de momento también suele corresponder a la magnitud relativa del momento.
La magnitud del momento se mide en unidades de fuerza por distancia. Las unidades métricas estándar para la magnitud de los momentos son Newton-metros, y las unidades inglesas estándar por un momento son pie-libras.
\[ M = F * d \]
\[ \text{Metric:} \,\, N * m \]
\[ \text{English:} \,\, lb * ft \]
Dirección:
En un problema bidimensional, la dirección puede pensarse como una cantidad escalar correspondiente a la dirección de rotación que causaría el momento. Un momento que provocaría una rotación en sentido antihorario es un momento positivo, y un momento que provocaría una rotación en sentido horario es un momento negativo.
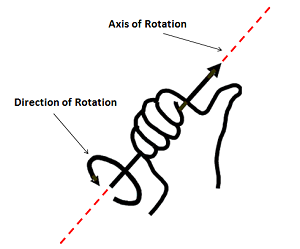
En un problema tridimensional, sin embargo, un cuerpo puede girar alrededor de un eje en cualquier dirección. Si este es el caso, necesitamos un vector que represente la dirección del momento. La dirección del vector momento se alineará con el eje de rotación que ese momento causaría, pero para determinar cuál de las dos direcciones podemos usar a lo largo de ese eje tenemos disponible usamos la regla de la mano derecha. Para usar la regla de la mano derecha, alinea tu mano derecha como se muestra en la Figura para\(\PageIndex{2}\) que tu pulgar se alinee con el eje de rotación por el momento y tus dedos rizados apunten en la dirección de rotación para tu momento. Si haces esto, tu pulgar estará apuntando en la dirección del vector momento.
Si miramos hacia atrás a problemas bidimensionales, todas las rotaciones ocurren alrededor de un eje que apunta directamente hacia dentro o fuera de la página (el\(z\) eje -axis). Usando la regla de la derecha, las rotaciones en sentido contrario a las agujas del reloj se representan por un vector en la\(z\) dirección positiva y las rotaciones en sentido horario se representan por un vector en la\(z\) dirección negativa.
Eje de rotación:
En problemas estáticos de ingeniería podemos elegir cualquier punto/eje como eje de rotación. No obstante, la elección de este punto afectará la magnitud y dirección del momento resultante, y el momento sólo es válido sobre ese punto.
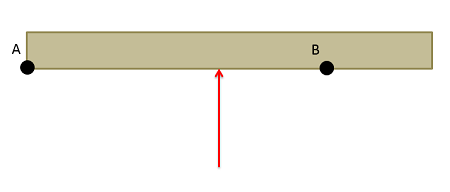
Aunque podemos tomarnos el momento sobre cualquier punto de un problema estático, si estamos sumando los momentos de múltiples fuerzas, todos los momentos deben tomarse alrededor de un eje de rotación común. Los momentos tomados sobre diferentes puntos no se pueden sumar para encontrar un “momento neto”.
Adicionalmente, si nos adentramos en el tema de la dinámica, donde se mueven los cuerpos, vamos a querer relacionar momentos con aceleraciones angulares. Para que esto funcione, o necesitaremos tomarnos los momentos sobre un solo punto que no se mueva (como la bisagra de una puerta) o necesitaremos tomarnos los momentos sobre el centro de masa del cuerpo. Sumar momentos sobre otros ejes de rotación no dará como resultado cálculos válidos.
Momentos de Cálculo:
Para calcular el momento en que una fuerza ejerce sobre un cuerpo, tendremos dos opciones principales: métodos escalares y métodos vectoriales. Los métodos escalares son generalmente más rápidos para problemas bidimensionales donde un cuerpo solo puede girar en sentido horario o antihorario, mientras que los métodos vectoriales son generalmente más rápidos para problemas tridimensionales donde el eje de rotación es más complejo.