
5.1: Estructuras
- Page ID
- 83836

Una estructura de ingeniería es un término que se usa para describir cualquier conjunto de cuerpos interconectados. Los diferentes cuerpos en la estructura pueden moverse uno con respecto al otro (como las cuchillas en un par de tijeras) o pueden fijarse uno respecto al otro (como las diferentes vigas conectadas para formar un puente).
Al analizar estructuras de ingeniería, a veces analizaremos la estructura como un todo, y a veces la dividiremos en cuerpos individuales que se analizan por separado. Los métodos exactos utilizados dependen de qué fuerzas desconocidas estamos buscando y qué tipo de estructura estamos analizando.
Fuerzas internas y externas:
Al examinar un solo cuerpo, encontraríamos las fuerzas que este cuerpo ejerció sobre los cuerpos circundantes, y las fuerzas que estos cuerpos circundantes ejercerían sobre el cuerpo que estamos analizando. Todas estas fuerzas son consideradas fuerzas externas porque son fuerzas entre el cuerpo y el ambiente externo.
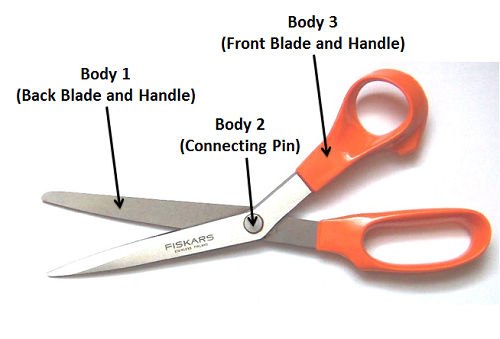
En una estructura de ingeniería, todavía tenemos fuerzas externas donde la estructura está interactuando con cuerpos externos a la estructura, pero también podemos pensar en las fuerzas que diferentes partes de la estructura ejercen entre sí (la fuerza entre el pasador y la cuchilla en la Figura\(\PageIndex{1}\), por ejemplo). Dado que ambos cuerpos forman parte de la estructura que estamos analizando, estas fuerzas se consideran fuerzas internas.
Si solo queremos determinar las fuerzas externas que actúan sobre una estructura, entonces podemos tratar toda la estructura como un solo cuerpo (asumiendo que la estructura es rígida como un todo). Si queremos determinar las fuerzas internas que actúan entre los componentes de la estructura, entonces tendremos que desmontar la estructura en cuerpos separados en nuestro análisis.
Tipos de Estructuras:
Otra consideración importante a la hora de analizar estructuras es el tipo de estructura que se está analizando. Todas las estructuras se agrupan en una de tres categorías: cerchas, marcos o máquinas. Los marcos y las máquinas se analizan de la misma manera por lo que la distinción entre ellos es menos importante, pero los métodos de análisis utilizados para trusses varían mucho de los métodos de análisis utilizados para marcos y máquinas, por lo que determinar si una estructura es una celosía o no es un primer paso importante en el análisis de estructuras.
Trusses:
Una celosía es una estructura que consta completamente de miembros de dos fuerzas. Si cualquiera de los cuerpos de la estructura no es un miembro de dos fuerzas, entonces la estructura es un bastidor o una máquina. Además, para ser un truss estáticamente determinado (un truss donde realmente podamos resolver para todas las incógnitas), el truss debe ser independientemente rígido en su conjunto. Si diferentes partes de la armadura pudieran moverse una con relación a la otra, entonces la armadura separada no es independientemente rígida.

Un miembro de dos fuerzas es un cuerpo donde las fuerzas se aplican en solo dos ubicaciones. Si se aplican fuerzas en más de dos ubicaciones, o si se aplican momentos, entonces el cuerpo no es un miembro de dos fuerzas (consulte la página de miembros de dos fuerzas para obtener más detalles). Debido a las suposiciones únicas que podemos hacer con miembros de dos fuerzas, podemos aplicar dos métodos únicos al análisis de cerchas (el método de juntas y el método de secciones) que no podemos aplicar a marcos y máquinas (donde no podemos asumir que tenemos miembros de dos fuerzas).
Marcos y Máquinas:
Un bastidor o una máquina es una estructura donde al menos un componente de la estructura no es un miembro de dos fuerzas. Este componente será un cuerpo en la estructura que tenga fuerzas que actúen en tres o más puntos sobre ella. La diferencia entre un bastidor y una máquina es que un marco es rígido en su conjunto, mientras que una máquina no es rígida en su conjunto.


Debido a que los marcos y las máquinas no constan enteramente de miembros de dos fuerzas, no podemos hacer los supuestos que nos permitan utilizar el método de juntas y el método de secciones. Por esta razón, necesitamos usar un método de análisis diferente (simplemente llamado el análisis de marcos y máquinas aquí).