
6.4: Tornillos Eléctricos
- Page ID
- 83797

Un tornillo de potencia (también llamado a veces tornillo de avance) es otra máquina simple que se puede utilizar para crear fuerzas muy grandes. El tornillo puede pensarse como una cuña o una rampa que se ha enrollado alrededor de un eje. Al sostener una tuerca estacionaria y girar el eje, podemos hacer que la tuerca se deslice hacia arriba o hacia abajo de la cuña en el eje. De esta manera, un momento relativamente pequeño en el eje puede provocar fuerzas muy grandes en la tuerca.


Análisis estático de tornillos de potencia:
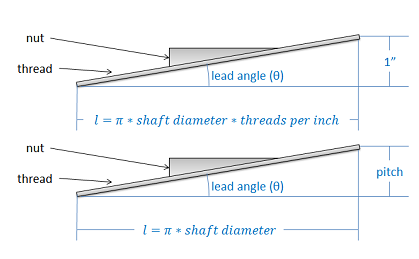
La forma más fácil de analizar un sistema de tornillo de potencia es convertir el problema en un problema 2D “desenvolviendo” la rampa alrededor del eje. Para ello necesitaremos dos números. Primero necesitaremos el diámetro del eje, y segundo necesitaremos ya sea los hilos por pulgada/centímetro o el paso del tornillo. Los hilos por pulgada te indican cuántos hilos tienes por pulgada/centímetro de tornillo. Con un diseño de una sola rosca (la mayoría de los tornillos), esta también será la cantidad de veces que la rosca se enrolla alrededor del tornillo en una pulgada/centímetro. El paso, por otro lado, te da la distancia entre dos roscas adyacentes. Cualquiera de estos números se puede utilizar para encontrar el otro.
Una vez que tenemos estos números, podemos imaginarnos desenvolviendo la rampa alrededor del tornillo y terminando con una rampa en una de las dos situaciones siguientes. En cualquier caso, podemos usar la función tangente inversa para encontrar el ángulo de avance, que se puede considerar como el ángulo de la rosca que la tuerca está subiendo. Encontrar el ángulo de avance es el primer paso para analizar un sistema de tornillo de potencia.
Una vez que encontremos el ángulo de avance, podemos dibujar un diagrama de cuerpo libre de la “tuerca” en nuestro sistema sin envolver. Aquí incluimos la fuerza de empuje que está empujando nuestra tuerca hacia arriba por la pendiente, la fuerza de carga que es la fuerza que la tuerca ejerce sobre algún cuerpo externo, la fuerza normal entre la tuerca y el tornillo, y la fuerza de fricción entre la tuerca y el tornillo.
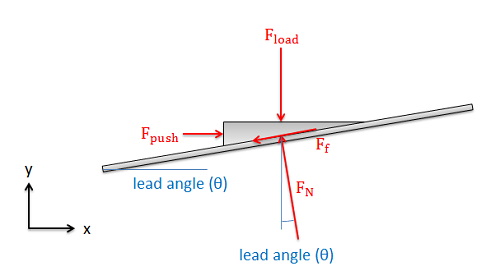
Si nuestro tornillo está empujando una carga a cierta velocidad constante, entonces podemos asumir dos cosas: Primero, la tuerca está en equilibrio, así podemos escribir las ecuaciones de equilibrio para la tuerca. Segundo, la tuerca se desliza, lo que indica que la fuerza de fricción será igual a la fuerza normal multiplicada por el coeficiente cinético de fricción.
\[ F_f = \mu_k * F_N \]
\[ \sum F_x = F_{push} - F_N * \sin (\theta) - \mu_k * F_N * \cos (\theta) = 0 \]\[ \sum F_y = F_{push} - F_N * \cos (\theta) - \mu_k * F_N * \sin (\theta) = 0 \]
Entonces podemos simplificar las ecuaciones anteriores en una sola ecuación que relaciona la fuerza de carga y la fuerza de empuje.
\[ F_{push} = \frac{\sin (\theta) + \mu_k * \cos (\theta)}{\cos (\theta) - \mu_k * \sin (\theta)} * F_{load} \]
En realidad, la fuerza de empuje no es una sola fuerza en absoluto. Son las fuerzas que impiden que la tuerca gire con el tornillo. La fuerza de empuje acumulativa realmente provocará un momento igual y opuesto al momento de entrada que está girando el eje.
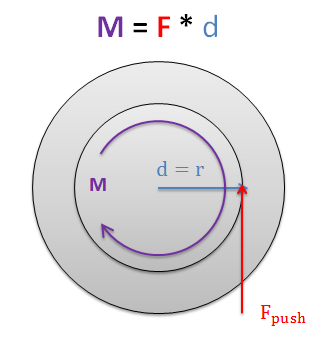
Por último, si reemplazamos la fuerza de empuje con el momento que está impulsando el tornillo en nuestro sistema (en este caso el par\(T\)), podemos relacionar el par de entrada que está impulsando nuestro tornillo con la fuerza con la que la tuerca en el tornillo está presionando hacia adelante. Los sistemas de tornillo generalmente están diseñados para permitir momentos de entrada bastante pequeños para empujar fuerzas de carga muy grandes.
\[ T = \frac{\sin (\theta) + \mu_k \cos (\theta)}{\cos (\theta) - \mu_k \sin (\theta)} * F_{load} * r_{shaft} \]
Tornillos Autoblocantes
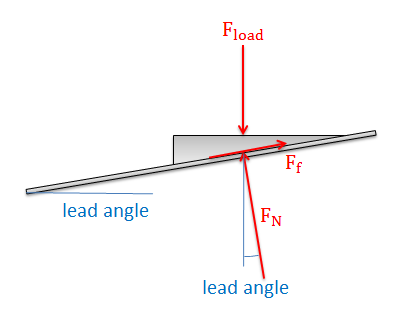
Imagina que aplicamos un torque a un tornillo de potencia para levantar un cuerpo; luego cuando llevamos la carga a la altura deseada dejamos de aplicar ese par para dejar que el cuerpo se asiente donde está. Si tuviéramos que volver a dibujar nuestro diagrama de cuerpo libre desde antes para la nueva situación, encontraríamos dos cosas.
- Falta la fuerza de empuje (ya que ya no se aplica un par al eje).
- La fricción ahora está luchando contra la tuerca que se desliza de nuevo por la rampa.
Con este nuevo diagrama de cuerpo libre, existen dos posibles escenarios que podrían ocurrir:
- La fuerza de fricción es lo suficientemente grande como para evitar que la tuerca se deslice por la rampa, lo que significa que todo permanecerá en equilibrio estático si se libera.
- La fuerza de fricción no será suficiente para evitar que la tuerca se deslice por la rampa, lo que significa que la carga comenzaría a caer tan pronto como se retire el par del eje.
Con aplicaciones de tornillo de potencia como un gato para automóvil, la segunda opción podría ser muy peligrosa. Por lo tanto, es importante saber si un sistema de tornillo de potencia es autobloqueante (escenario 1 anterior) o no autobloqueante (escenario 2 anterior).
Para definir el límite entre los sistemas de autobloqueo y los sistemas no autoblocantes, utilizamos algo llamado ángulo de autobloqueo. Como nos diría la intuición, el deslizamiento no ocurre en pendientes muy suaves (pequeños ángulos de avance) mientras que sí ocurre en pendientes muy pronunciadas (grandes ángulos de avance). El ángulo en el que la tuerca comenzaría a deslizarse se conoce como el ángulo de autobloqueo.
Para encontrar el ángulo de autobloqueo, asumiremos un movimiento inminente (relacionando la fuerza de fricción con la fuerza normal) y dejaremos el ángulo de avance como desconocido. Esto nos permite crear el diagrama de cuerpo libre como se muestra a continuación y nos da las ecuaciones de equilibrio a continuación.
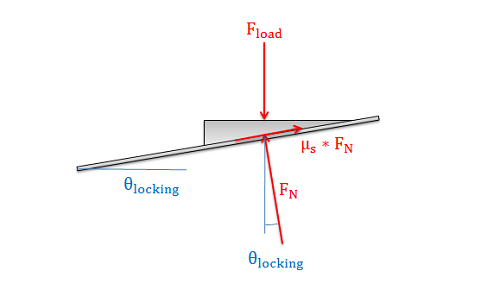
\[ \sum F_x = - F_N * \sin (\theta) + \mu_s * F_N * \cos (\theta) = 0 \]\[ \sum F_y = -F_{load} + F_N * \cos (\theta) + \mu_s * F_N * \sin (\theta) = 0 \]
Usando la ecuación de\(x\) equilibrio como punto de partida, podemos resolver para el ángulo\(\theta\) (eliminando la fuerza normal todos juntos en el proceso). Esta nueva ecuación que se muestra a continuación nos da el ángulo de autobloqueo. \[ \theta_{locking} = \tan ^{-1} (\mu_s) \]
Los sistemas con ángulos de derivación más pequeños que este serán autobloqueantes, mientras que los sistemas con ángulos de avance mayores que este no serán autobloqueantes.
Ejemplo\(\PageIndex{1}\)
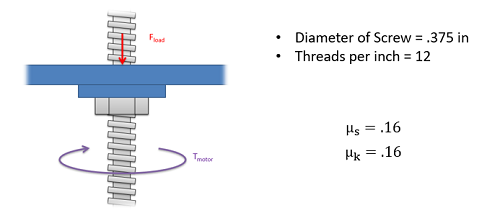
El tornillo de potencia de abajo se está utilizando para levantar una plataforma con un peso de 12 libras. Con base en la siguiente información...
- ¿Cuál es el par requerido en el eje para levantar la carga?
- ¿Caería la carga si se quitara el toque del eje?
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/uB2r3AtxCRs.