
11.6: Capítulo 11 Problemas con las tareas
- Page ID
- 83891

Ejercicio\(\PageIndex{1}\)
Está diseñando una amoladora de banco con una velocidad de operación de 3600 rpm.
- Si quieres que la amoladora alcance su velocidad de funcionamiento completa en 4 segundos, ¿cuál debe ser la velocidad de aceleración angular en radianes por segundo al cuadrado?
- Si la muela tiene un diámetro de 8 pulgadas, ¿cuál será la velocidad de la superficie de la muela?
.png)
- Solución
-
\(\alpha = 94.25 \ \frac{rad}{s}\)
\(v = 125.67 \ ft/s\)
Ejercicio\(\PageIndex{2}\)
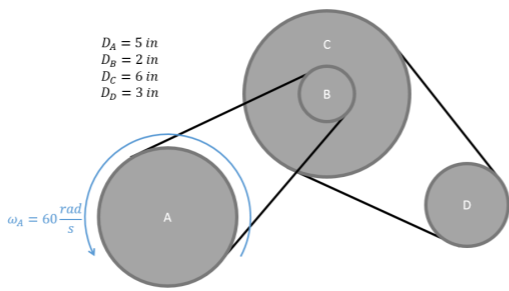
Un sistema accionado por correa tiene una entrada en la polea A, que impulsa la polea B, que está unida con un eje sólido a la polea C, que impulsa la polea D. Si la entrada gira a 60 rad/s en sentido contrario a las agujas del reloj, determine la velocidad angular y la dirección de rotación para la salida en D.
.png)
- Solución
-
\(\omega_D = 300 \ \frac{rad}{s}\)en sentido antihorario
Ejercicio\(\PageIndex{3}\)
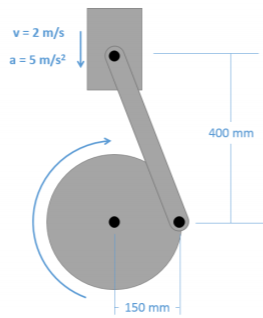
El pistón en un mecanismo de pistón y manivela tiene la velocidad y aceleración que se muestran a continuación. Mediante el análisis de movimiento absoluto, determine la velocidad angular actual y la aceleración angular para la manivela.
.png)
- Solución
-
\(\omega = 13.33 \ \frac{rad}{s}\)en sentido horario
\(\alpha = 100.16 \ \frac{rad}{s^2}\)en sentido horario
Ejercicio\(\PageIndex{4}\)
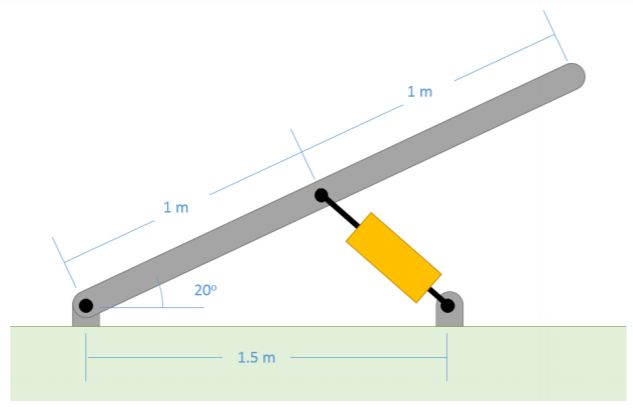
Se está abriendo una trampilla con un cilindro hidráulico que se extiende a velocidad constante de 0.7 m/s. Si la puerta se encuentra actualmente en un ángulo de veinte grados como se muestra a continuación, ¿cuál es la velocidad angular actual y la aceleración angular para la puerta?
.png)
- Solución
-
\(\dot{\theta} = 0.896 \ \frac{rad}{s}, \, \ddot{\theta} = -1.246 \ \frac{rad}{s^2} \)
Ejercicio\(\PageIndex{5}\)
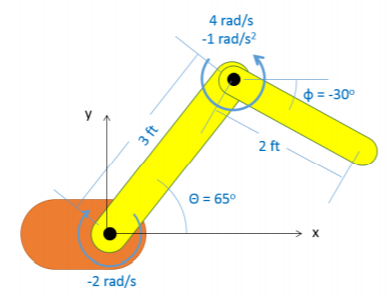
Un brazo robótico experimenta las velocidades angulares y aceleraciones que se muestran a continuación. Con base en esta información, determinar la velocidad y la aceleración del extremo del brazo en las\(y\) direcciones\(x\) y.
.png)
- Solución
-
\( v_x = 9.44 \ ft/s, \, v_y = 4.39 \ ft/s \)
\( a_x = -33.78 \ ft/s^2, \, a_y = 3.39 \ ft/s^2 \)