
13.1: Conservación de Energía para Cuerpos Rígidos
- Page ID
- 84022

Los conceptos de Trabajo y Energía proporcionan la base para resolver una variedad de problemas cinéticos. Generalmente, este método se llama Método Energético o Conservación de Energía, y puede reducirse a la idea de que el trabajo realizado a un cuerpo será igual al cambio de energía de ese cuerpo. Dividiendo la energía en piezas de energía cinética y potencial como lo hacemos a menudo en problemas de dinámica, llegamos a la siguiente ecuación base para la conservación de energía.
\[ W = \Delta KE + \Delta PE \]
Es importante notar que a diferencia de la Segunda Ley de Newton, la ecuación anterior no es una ecuación vectorial. No necesita ser desglosado en componentes que puedan simplificar el proceso. Sin embargo, solo tenemos una sola ecuación y por lo tanto solo podemos resolver para un solo desconocido, lo que puede limitar este método.
Trabajo en Problemas de Cuerpo Rígido:
Para el trabajo realizado a un cuerpo rígido, debemos considerar cualquier fuerza aplicada sobre una distancia como lo hicimos para las partículas, así como cualquier momento ejercido sobre algún ángulo de rotación. Si se trata de fuerzas constantes y momentos constantes, simplemente multiplicamos la fuerza por la distancia y el momento por el ángulo de rotación para encontrar el trabajo general realizado en el problema. Al igual que con las partículas, estos son los componentes de las fuerzas en la dirección de desplazamiento, con fuerzas que se oponen al movimiento contando como trabajo negativo. De igual manera, se trata de momentos en el sentido de rotación, con momentos opuestos a la rotación contando como trabajo negativo. Ambos tipos de trabajo son aditivos, y todo el trabajo se agrupa para su análisis.
\[ W = F * d + M * \Delta \theta \]
En instancias de fuerzas no constantes y momentos no constantes, necesitaremos integrar las fuerzas y momentos sobre la distancia recorrida y el ángulo de rotación, respectivamente.
\[ W = \int \limits_{x_1}^{x_2} F(x) \, dx + \int \limits_{\theta_1}^{\theta_2} M(\theta) \, d \theta \]
Energía:
En cuerpos rígidos, al igual que con las partículas, vamos a romper la energía en energía cinética y energía potencial. La energía cinética es la masa de energía en movimiento, mientras que la energía potencial representa la energía que se almacena debido a la posición o tensiones en un cuerpo.
En su forma de ecuación, la energía cinética de un cuerpo rígido está representada por la mitad de la masa del cuerpo por su velocidad al cuadrado, más la mitad del momento másico de inercia por la velocidad angular al cuadrado. Si queremos determinar el cambio en la energía cinética, simplemente tomaríamos la energía cinética final menos la energía cinética inicial.
\[ KE = \frac{1}{2} m v^2 + \frac{1}{2} I \omega^2 \]
\[ \Delta KE = \left( \frac{1}{2} m v_f^2 - \frac{1}{2} m v_i^2 \right) + \left( \frac{1}{2} I \omega_f^2 - \frac{1}{2} I \omega_i^2 \right) \]
La energía potencial, a diferencia de la energía cinética, no es realmente energía en absoluto. En cambio, representa el trabajo que una fuerza dada potencialmente hará entre dos instantes en el tiempo. La energía potencial puede venir de muchas formas, pero las dos que discutiremos aquí son la energía potencial gravitacional y la energía potencial elástica. Estos representan el trabajo que harán la fuerza gravitacional y una fuerza de resorte, respectivamente. A menudo usamos estos términos de energía potencial en lugar del trabajo realizado por gravedad o resortes respectivamente. Al incluir estos términos de energía potencial, es importante no incluir también el trabajo realizado por la gravedad o las fuerzas de resorte.
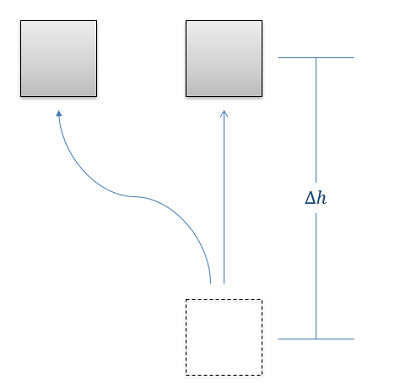
El cambio en la energía potencial gravitacional para cualquier sistema está representado por la masa del cuerpo, multiplicado por el valor\(g\) (9.81 m/s 2 o 32.2 pies/s 2 en la superficie terrestre), multiplicado por el cambio vertical de altura entre la posición inicial y la posición final. En forma de ecuación, esto es como sigue. \[ \Delta PE = m * g * \Delta h \]
A diferencia del trabajo y la energía cinética, no existe una versión rotacional de la energía potencial gravitacional, así que esto es exactamente lo mismo que teníamos para las partículas.
Para determinar el cambio en la energía potencial elástica, tendremos que identificar cualquier resorte lineal (como lo tuvimos para las partículas), así como cualquier resorte torsional y las constantes de resorte para cada uno de estos resortes.

Para encontrar el cambio en la energía potencial elástica, necesitaremos conocer la rigidez de cualquier resorte en el problema (representado por\(k\), en unidades de fuerza por distancia para resortes lineales o momento por ángulo de torsión para resortes torsionales) así como la distancia o ángulo sobre el que se ha estirado el resorte o por debajo de su posición natural de descanso. Esta diferencia con respecto a la posición de reposo se representa por la distancia\(x\) para los resortes lineales o el ángulo\(\theta\) para los resortes de torsión. Una vez que tenemos esos valores, la energía potencial elástica se puede calcular multiplicando la mitad de la rigidez por la distancia al\(x\) cuadrado o el ángulo al\(\theta\) cuadrado. Para encontrar el cambio en la energía potencial elástica, simplemente tomamos la energía potencial elástica final menos la energía potencial elástica inicial.
\[ \Delta PE_{linear \ spring} = \frac{1}{2} k \ x_f^2 - \frac{1}{2} k \ x_i^2 \]
\[ \Delta PE_{torsional \ spring} = \frac{1}{2} k \ \theta_f^2 - \frac{1}{2} k \ \theta_i^2 \]
Volviendo a nuestra ecuación original de conservación de energía, simplemente tapamos los términos apropiados en cada lado (trabajo a la izquierda y energías a la derecha) y equilibramos los dos lados para resolver cualquier incógnitas. Los términos que no existen o no cambian (como la energía potencial elástica en un problema sin resortes, o\(\Delta KE\) en un problema donde no hay cambio en la velocidad del cuerpo) se pueden poner a cero. Nuevamente, solo hay una ecuación, por lo que solo podemos resolver por un solo desconocido a menos que complementemos la ecuación de conservación de energía con otras ecuaciones de relación.
Ejemplo\(\PageIndex{1}\)
El tocadiscos de un tocadiscos consiste en un disco de 12 pulgadas de diámetro con un peso de 5 lbs. El motor acelera el tocadiscos desde el reposo hasta su velocidad de operación de 33.33 rpm en una rotación. ¿Cuál es el trabajo realizado por el motor? ¿Cuál es el par promedio que ejerció el motor?

- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/UPHgU-o80Q0.
Ejemplo\(\PageIndex{2}\)
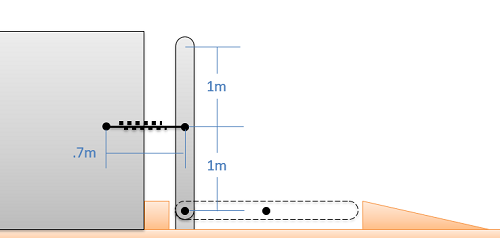
Un sistema como se muestra a continuación se utiliza para ralentizar pasivamente el descenso de una puerta. El portón se puede aproximar como una placa plana en su borde con una masa de 25 kilogramos y una altura de 2 metros. Supongamos que el resorte no está estirado como se muestra en el diagrama.
- ¿Cuál sería la velocidad angular de la puerta sin el resorte?
- Si queremos reducir la velocidad angular en la parte inferior al 25% de su valor original, ¿cuál debería ser la constante elástica?
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/HCAC0tNR18w.
Ejemplo\(\PageIndex{3}\)
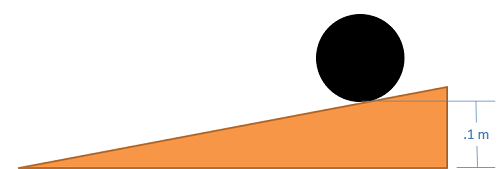
Una bola esférica de 5 kilogramos con un radio de 0.05 metros se coloca en una rampa como se muestra a continuación. Si la bola rueda sin deslizarse, ¿cuál es la velocidad de la bola en la parte inferior de la rampa?
- Solución
-
Video\(\PageIndex{4}\): Solución trabajada a problema de ejemplo\(\PageIndex{3}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/p2pvQ0kCWIU.
Ejemplo\(\PageIndex{4}\)
Se coloca un medio cilindro de 16 kilogramos sobre una superficie dura y plana como se muestra a continuación y se libera del reposo. ¿Cuál será la velocidad angular máxima, ya que oscila de un lado a otro?

- Solución
-
Video\(\PageIndex{5}\): Solución trabajada a problema de ejemplo\(\PageIndex{4}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/HpRtDQjoEBA.
Ejemplo\(\PageIndex{5}\)
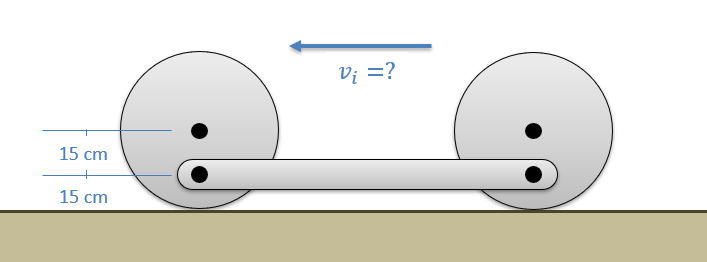
Un mecanismo consiste en dos ruedas de 3 kilogramos conectadas a una barra de 2 kilogramos como se muestra a continuación. Con base en las dimensiones del diagrama, ¿cuál es la velocidad inicial mínima requerida para las ruedas para asegurar que el mecanismo lo haga todo el camino a través de una rotación sin balancearse hacia atrás?
- Solución
-
Video\(\PageIndex{6}\): Solución trabajada a problema de ejemplo\(\PageIndex{5}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/8cjQ1S6yOTc.