
15.1: Vibraciones libres sin amortiguar
- Page ID
- 84046

Las vibraciones ocurren en sistemas que intentan regresar a su estado de reposo o equilibrio cuando se perturban, o se alejan de su estado de equilibrio. Las vibraciones más simples para analizar son las vibraciones sin amortiguar, libres con un grado de libertad.
“Sin amortiguar” significa que no hay pérdidas de energía con el movimiento (ya sea que las pérdidas sean intencionales, por agregar amortiguadores, o no intencionales, a través de arrastre o fricción). Un sistema sin amortiguar vibrará para siempre sin ninguna fuerza aplicada adicional. Un péndulo simple tiene una amortiguación muy baja, y oscilará durante mucho tiempo antes de detenerse. “Amortiguado” significa que hay fuerzas resistivas y pérdidas de energía con el movimiento que hacen que el sistema deje de moverse eventualmente.
“Libre” significa que, después de la perturbación inicial, las únicas fuerzas que actúan sobre el sistema son internas al sistema (resortes, amortiguadores) y/o gravedad. Un diapasón continúa vibrando después de la perturbación inicial de ser golpeado. En contraste, “forzado” significa que hay una fuerza externa, típicamente periódica, que actúa sobre el sistema. Un martillo neumático vibra debido a tener un suministro de aire comprimido que fuerza continuamente la broca hacia arriba y hacia abajo, y deja de vibrar muy rápidamente sin ese forzamiento periódico externo.
“Un grado de libertad” significa que solo consideraremos sistemas con una masa que vibra a lo largo de una dirección (por ejemplo, use variable\(x\)) o alrededor de un eje (por ejemplo, use variable\(\theta\)). Los sistemas que tienen más de una masa o que vibran a lo largo o alrededor de dos o más ejes tienen más de un grado de libertad.
Podemos derivar la ecuación del sistema configurando un diagrama de cuerpo libre. Considera una masa sentada sobre una superficie sin fricción, unida a una pared a través de un resorte.
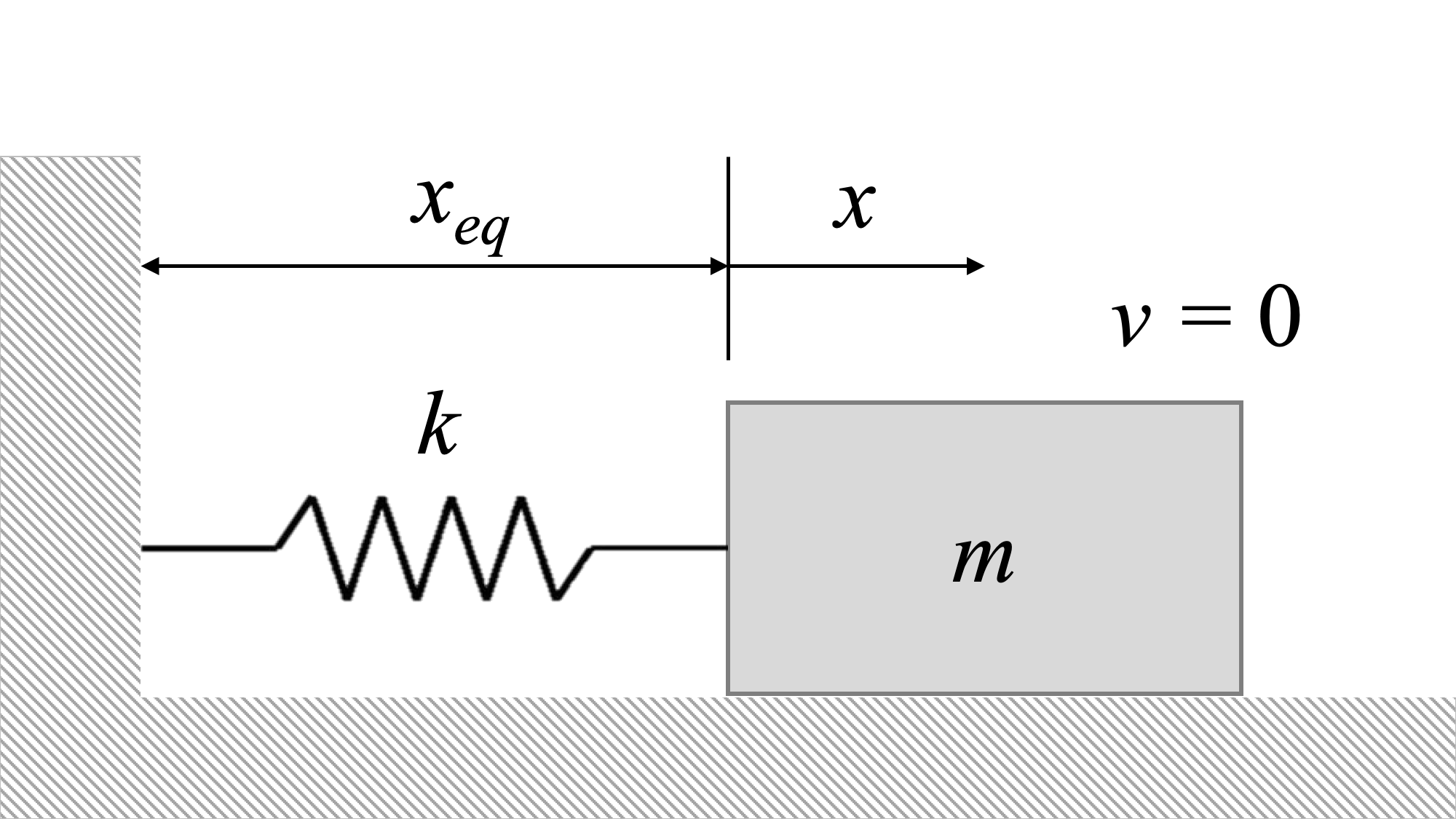
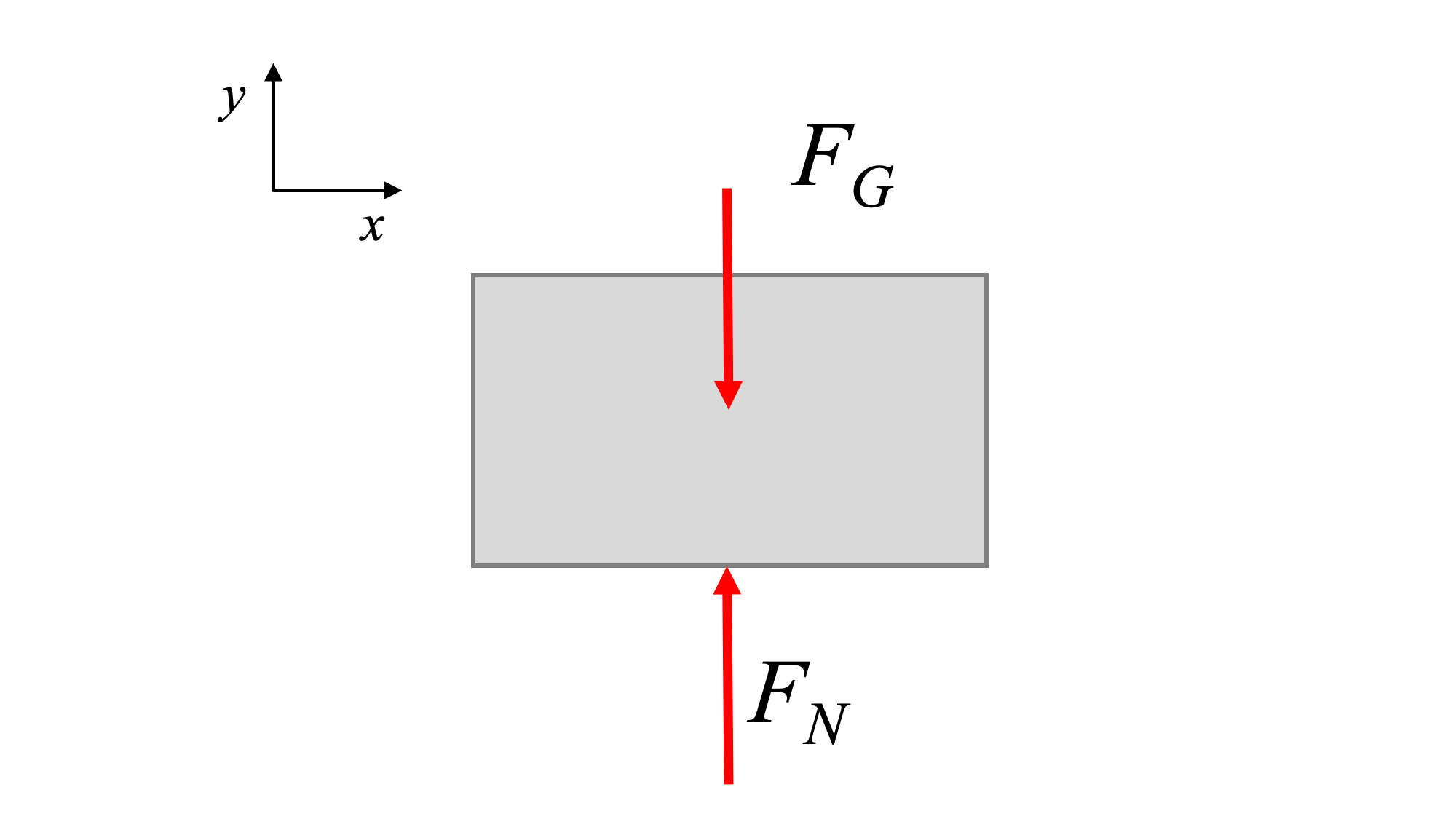
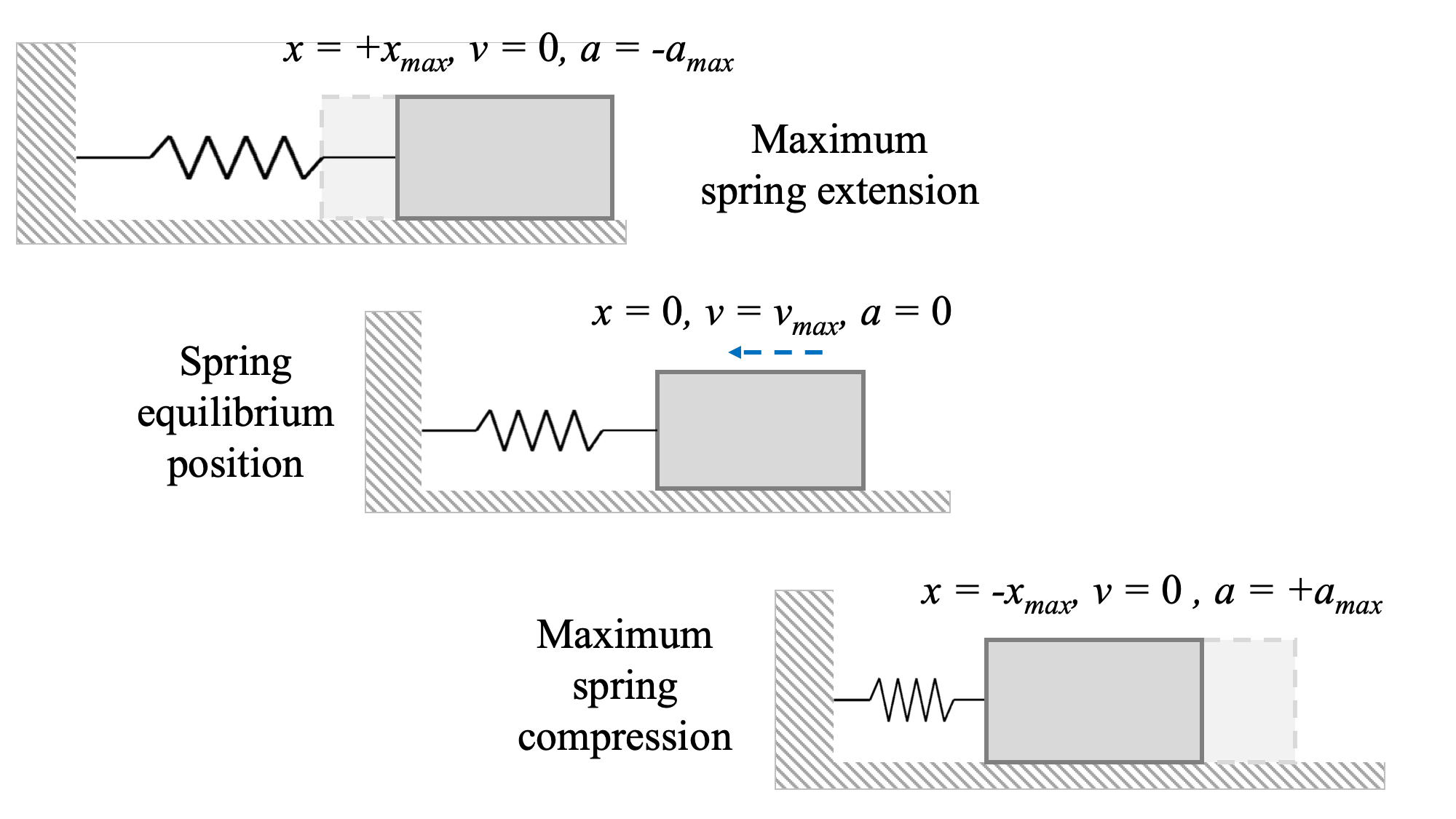
El sistema anterior está en equilibrio. Está en reposo, y permanecerá en reposo a menos que alguna otra fuerza actúe sobre ella.
Para iniciar el sistema vibrando, necesitamos perturbarlo. La perturbación está alejando el sistema del equilibrio en una pequeña cantidad.
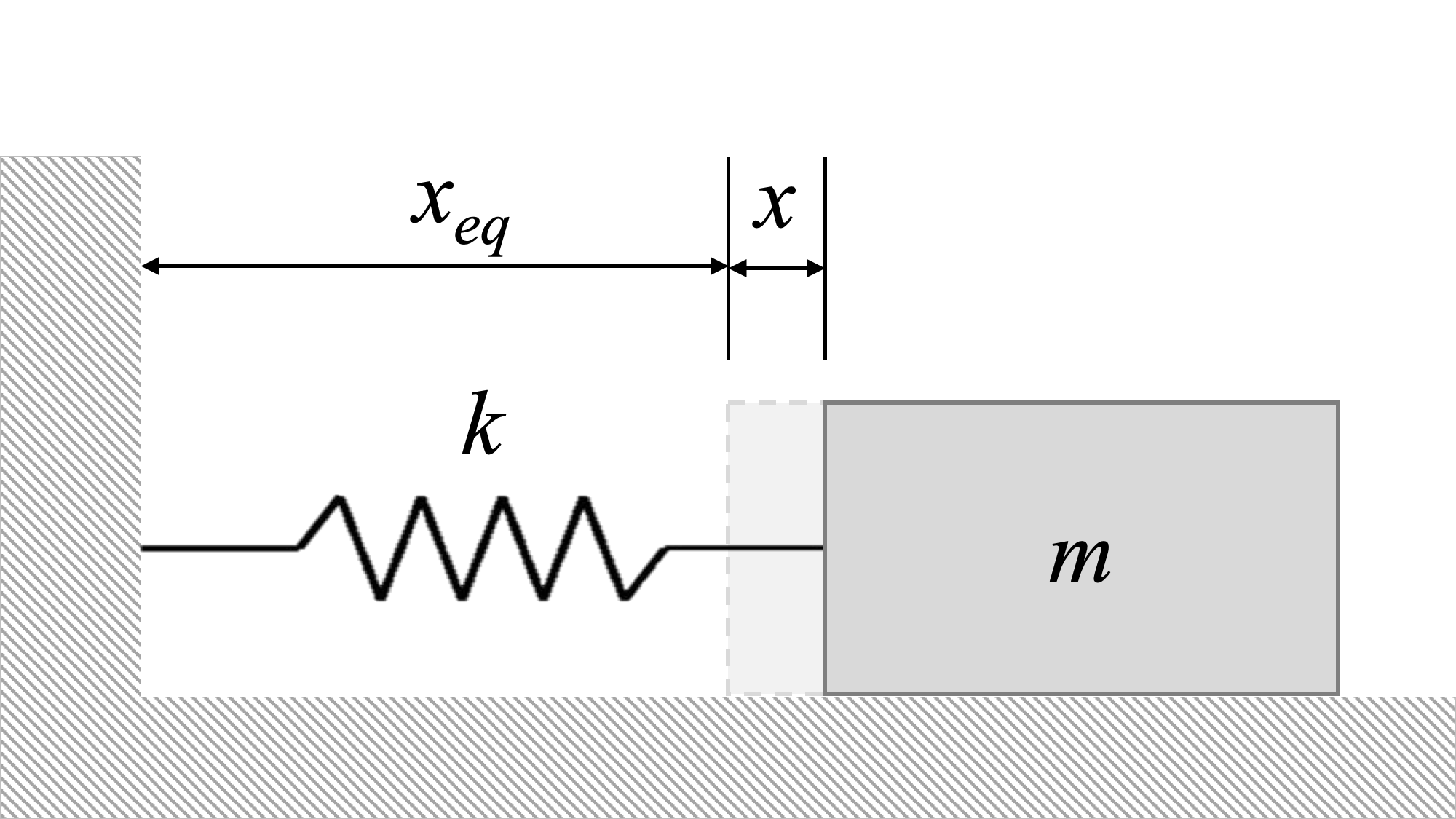
Cuando perturbimos este sistema, estiramos o comprimimos el resorte. Esto genera una fuerza de resorte, y la fuerza del resorte siempre está en una dirección que tiende a tirar del sistema hacia el equilibrio.
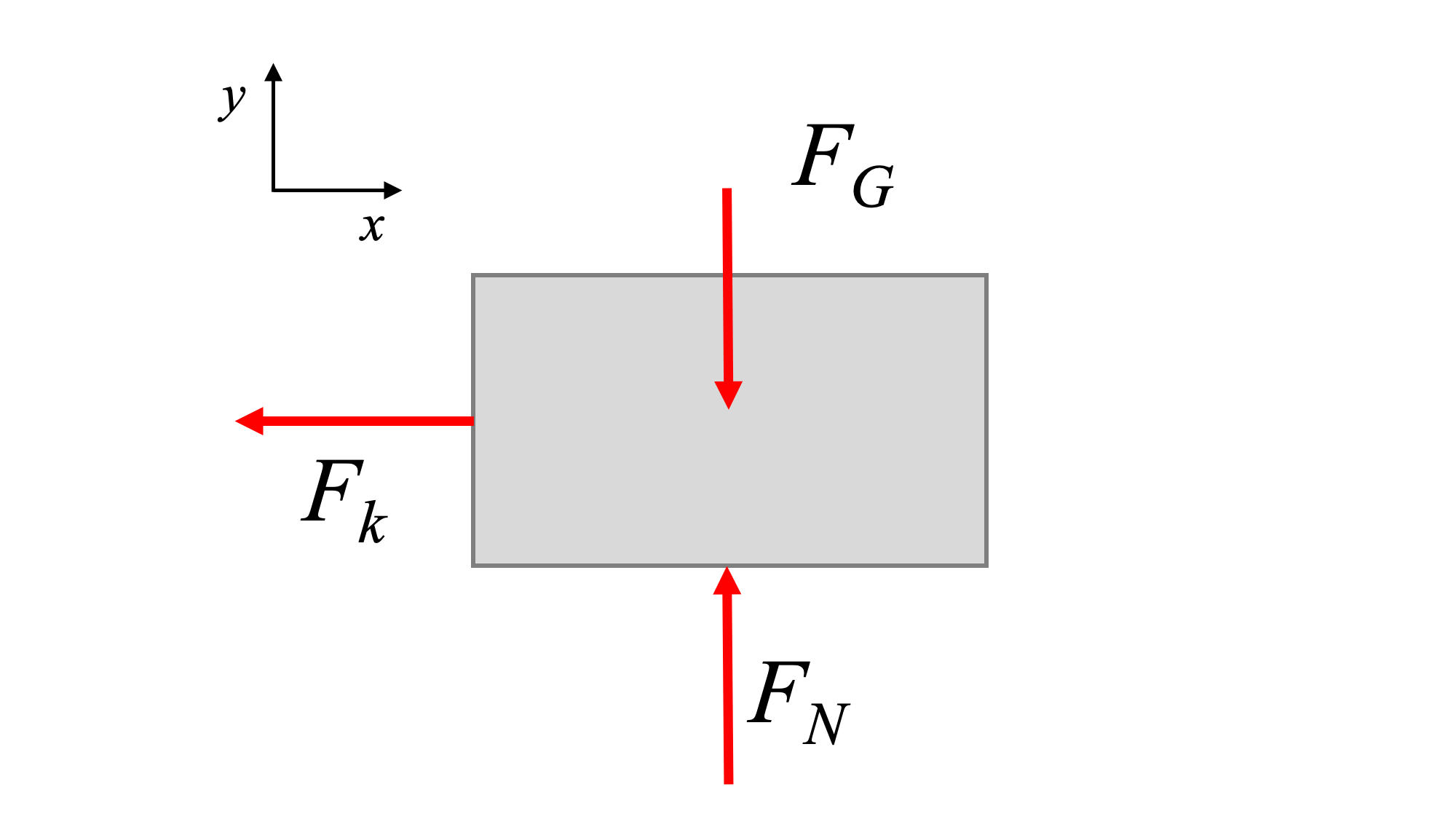
Podemos generar la ecuación de movimiento del sistema, y determinar los detalles de cómo vibrará, analizando este estado perturbado. Recordemos que la fuerza o momento del resorte es:
\[ \vec{F}_k = k \vec{x} \]
\[ \vec{M}_k = k \vec{\omega} \]
Tenga en cuenta que las constantes de resorte en las ecuaciones anteriores tienen diferentes unidades, dependiendo de si el resorte es lineal (Newton/metro) o torsional (Newton-metros/radianes), y que se\(\theta\) debe dar en radianes. La magnitud de la fuerza del resorte depende de\(x\), la distancia perturbada desde la longitud no estirada del resorte (no necesariamente la posición de equilibrio del sistema), y lo mismo es cierto para el momento de un resorte torsional. La fuerza o momento del resorte está en la dirección/orientación opuesta a la del desplazamiento. Es decir, si se tira de la masa hacia la derecha, la fuerza del resorte apunta hacia la izquierda.
El proceso para encontrar la ecuación de movimiento del sistema es el siguiente:
- Esboce el sistema con una pequeña perturbación positiva (\(x\)o\(\theta\)).
- Dibuja el diagrama de cuerpo libre del sistema perturbado. Asegúrese de que la fuerza del resorte tenga una dirección opuesta a la perturbación.
- Encuentra la única ecuación de movimiento para el sistema en la coordenada perturbada usando la Segunda Ley de Newton. Mantenga la misma dirección positiva para la posición y asigne aceleración positiva en la misma dirección.
- Mueva todos los términos de la ecuación a un lado y verifique que todos los términos sean positivos. Si todos los términos no son positivos, hay un error en la dirección de desplazamiento, aceleración y/o fuerza del resorte.
Para el sistema de ejemplo anterior, con constante de masa\(m\) y resorte\(k\), derivamos lo siguiente:
\[ \sum F_x = m a_x = m \ddot{x} \]
\[ -F_k = m \ddot{x} \]
\[ -kx = m \ddot{x} \]
\[ m \ddot{x} + kx = 0 \]
Esto nos da una ecuación diferencial que describe el movimiento del sistema. Podemos reescribirlo en forma normal:
\[ m \ddot{x} + kx = 0 \]
\[ \Rightarrow \ddot{x} + \frac{k}{m} x = 0 \]
\[ \Rightarrow \ddot{x} + \omega_n^2 x = 0 \]
El término\(\omega_n\) se denomina frecuencia natural angular del sistema, y tiene unidades de radianes/segundo.
\[ \omega_n^2 = \frac{k}{m} \]
\[ \omega_n = \sqrt{\frac{k}{m}} \]
Suponiendo que la perturbación inicial del sistema puede ser descrita por la posición y velocidad de la masa en\(t=0\), entonces:
\[ x(0) = x_0 \]
\[ v(0) = \dot{x}(0) = v_0. \]
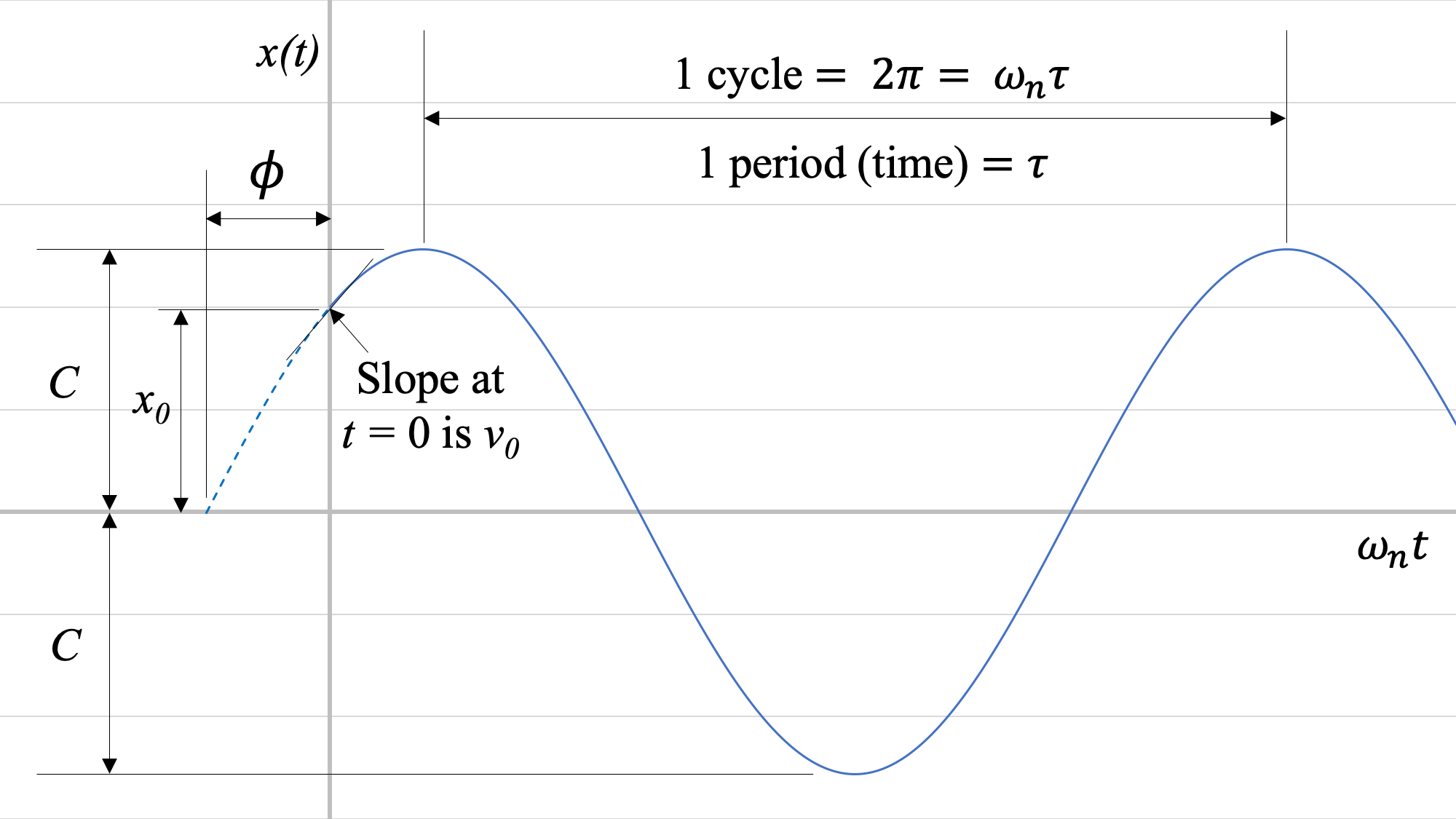
La solución a la ecuación diferencial, que proporciona la posición\(x(t)\) del sistema en el momento\(t\), es:
\[ x(t) = C \sin \left( \omega_n t + \phi \right), \]
\[ \text{where:} \quad \omega_n = \sqrt{\frac{k}{m}}, \,\, C = \sqrt{ \left( \frac{v_0}{\omega_n} \right)^2 + x_0^2 }, \,\, \phi = \tan ^{-1} \left( \frac{x_0 \omega_n}{v_0} \right). \]
La amplitud\(C\) describe el desplazamiento máximo durante las oscilaciones (i.e.\(x_{max}\)), y la fase\(\phi\) describe cómo se desplaza la función sinusoidal en el tiempo.
Para un sistema donde hay vibración torsional (es decir, la oscilación implica una rotación), las ecuaciones son de manera similar:
\[ I \ddot{\theta} + k \theta = 0 \]
\[ \Rightarrow \ddot{\theta} + \frac{k}{I} \theta = 0 \]
\[ \Rightarrow \ddot{\theta} + \omega_n^2 \theta = 0, \]
\[ \text{where} \,\, \omega_n = \sqrt{\frac{k}{I}}. \]
Suponiendo que la perturbación inicial del sistema puede describirse por la posición y velocidad de la masa en\(t=0\),
\[x(0) = x_0 \]
\[ v(0) = \dot{x}(0) = v_0. \]
La solución a la ecuación diferencial, que proporciona la posición\(x(t)\) del sistema en el momento\(t\), es:
\[ x(t) = C \sin (\omega_n t + \phi) \]
\[ \text{where:} \quad \omega_n = \sqrt{\frac{k}{I}}, \,\, C = \sqrt{ \left( \frac{\omega_0}{\omega_n} \right) ^2 + \theta_0^2 }, \,\, \phi = \tan ^{-1} \left( \frac{\theta_0 \omega_n}{\omega_0} \right). \]
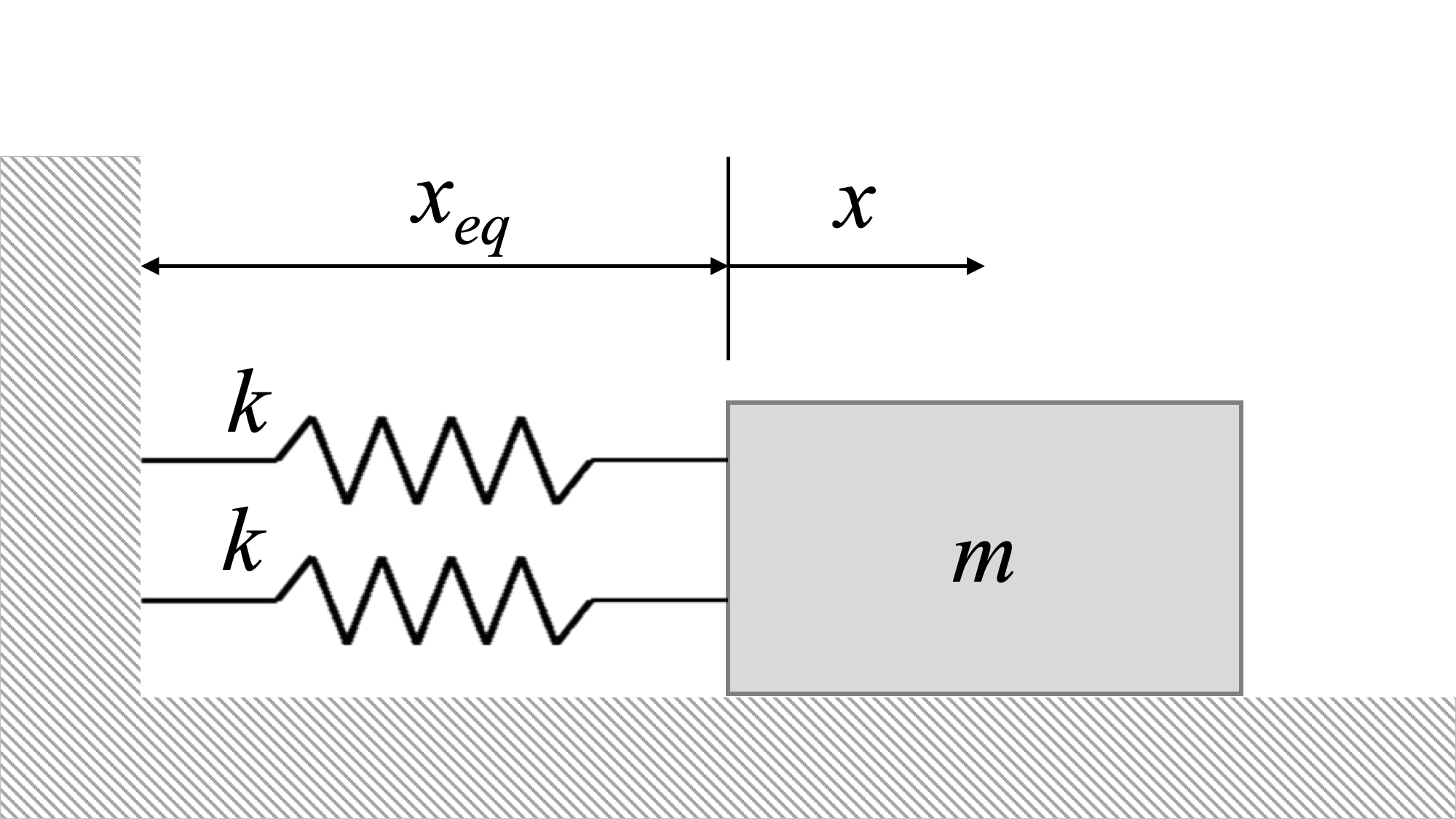
Encuentra una expresión para la frecuencia natural angular del siguiente sistema, y encuentra la amplitud máxima de vibración del sistema con masa\(m\) = 10 kg y constante de resorte\(k\) = 200 N/m cuando se le da un desplazamiento inicial de\(x_0\) = 0.1 m y una velocidad inicial de\(v_0\) = 0.3 m/ s.
- Solución
-
Video\(\PageIndex{1}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\). Fuente de YouTube: https://youtu.be/J1TVxxVjV_c.
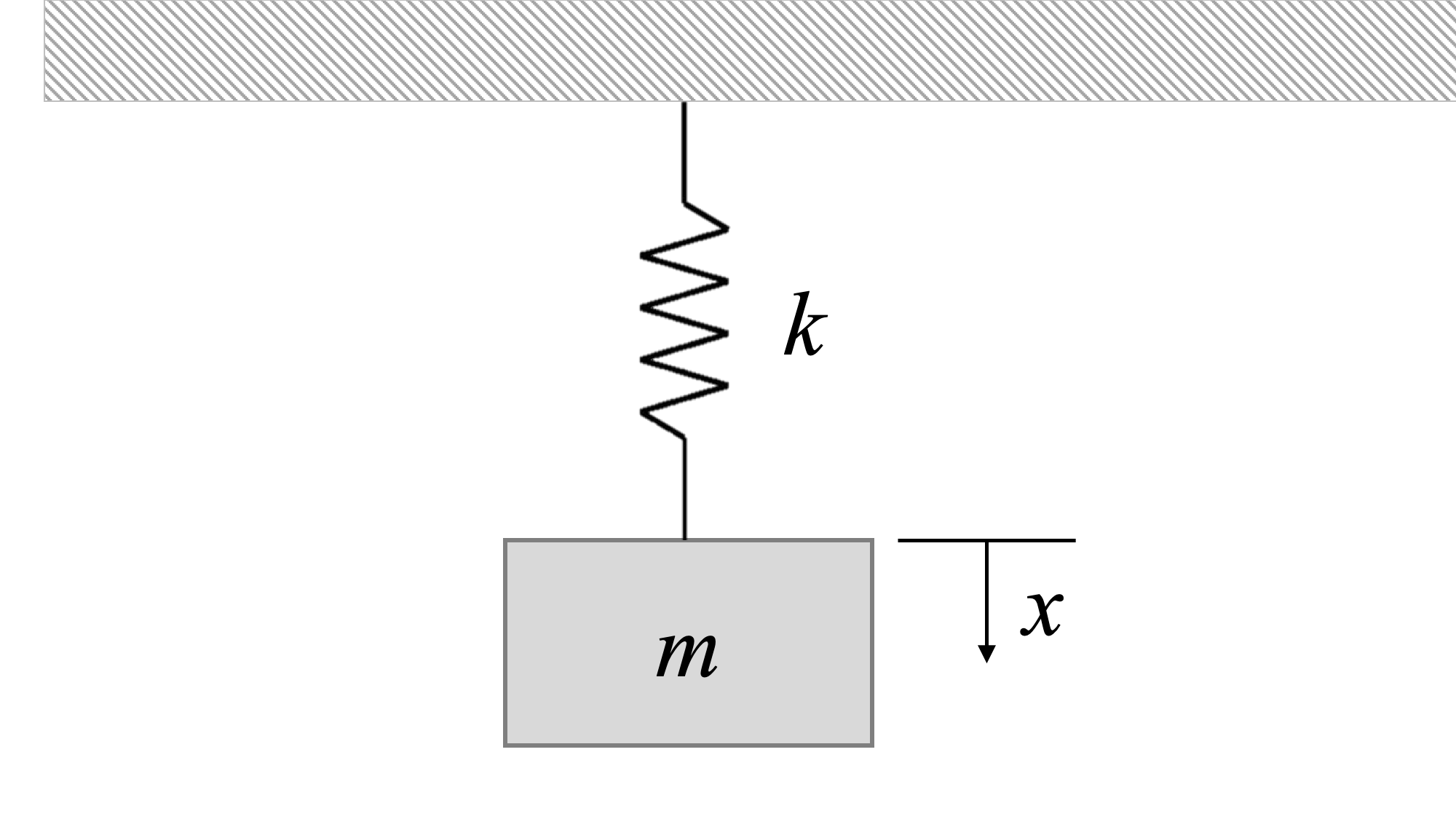
Determinar la ecuación de movimiento del sistema a partir de la Segunda Ley de Newton. Supongamos masa\(m\) = 5 kg y constante de resorte\(k\) = 500 N/m. Encuentre el desplazamiento inicial\(x_0\), de tal manera que la masa oscile en un rango total de 4 metros. Supongamos que la velocidad de perturbación inicial\(v_0\),, es de 10 m/s.
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\). Fuente de YouTube: https://youtu.be/TAy412iVvwE.