
15.2: Vibraciones libres viscosas amortiguadas
- Page ID
- 84057

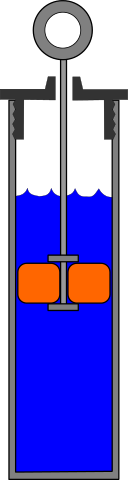
La amortiguación viscosa es una amortiguación que es proporcional a la velocidad del sistema. Es decir, cuanto más rápido se mueve la masa, más fuerza de amortiguación resiste ese movimiento. Los fluidos como el aire o el agua generan fuerzas de arrastre viscosas.
Solo consideraremos amortiguadores viscosos lineales, es decir donde la fuerza de amortiguación es linealmente proporcional a la velocidad. La ecuación para la fuerza o momento producido por el amortiguador, en cualquiera\(x\) o\(\theta\), es:
\[ \vec{F}_c = c \vec{\dot{x}}, \]
\[ \vec{M}_c = c \vec{\dot{\theta}}, \]
donde\(c\) esta la constante de amortiguacion. Esta es una propiedad física del amortiguador basada en el tipo de fluido, tamaño del pistón, etc. Tenga en cuenta que las unidades de\(c\) cambio dependiendo de si se trata de amortiguar el movimiento lineal (N-S/m) o el movimiento rotacional (N-m s/rad).
Cuando el sistema está en reposo en la posición de equilibrio, el amortiguador no produjo fuerza sobre el sistema (sin velocidad), mientras que el resorte puede producir fuerza sobre el sistema, como en la masa colgante que se muestra arriba. Recordemos que esta es la posición de equilibrio, pero el resorte NO está en su longitud no estirada, ya que la masa estática produce una extensión del resorte.
Si perturbimos el sistema (aplicando un desplazamiento inicial, una velocidad inicial, o ambos), el sistema tenderá a volver a su posición de equilibrio. El aspecto de ese movimiento dependerá de los parámetros del sistema (\(m\),\(c\), y\(k\)).
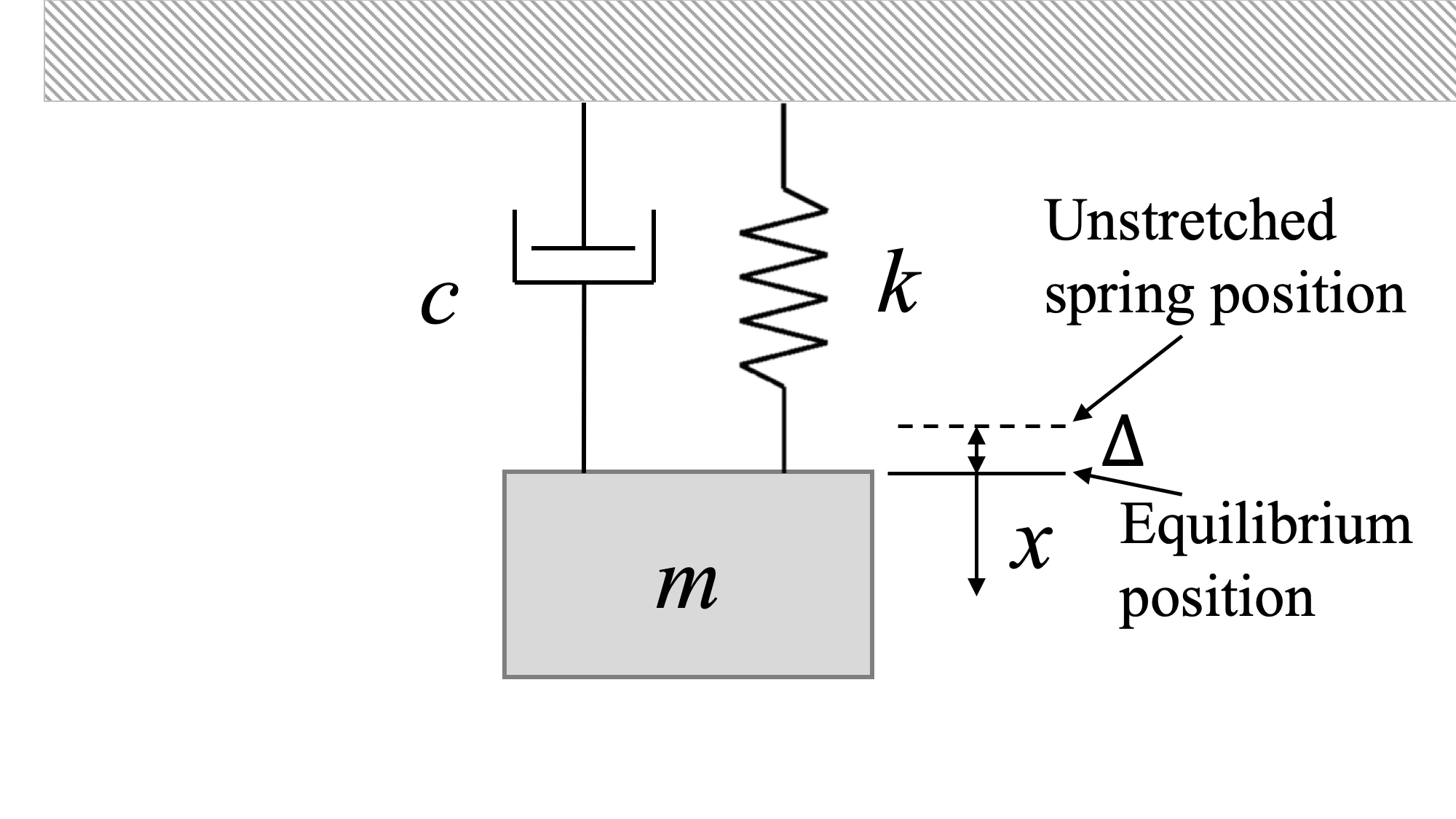
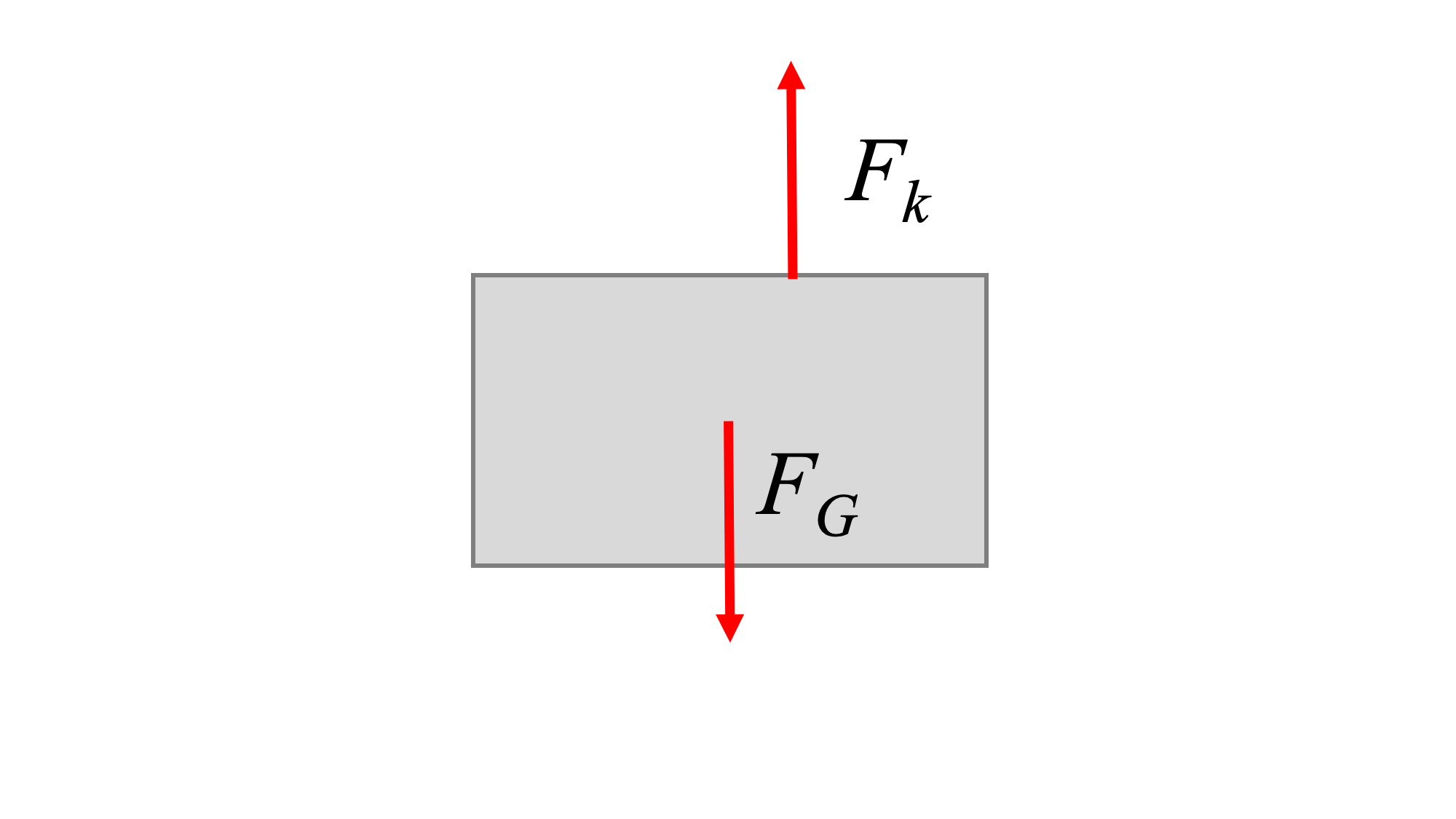
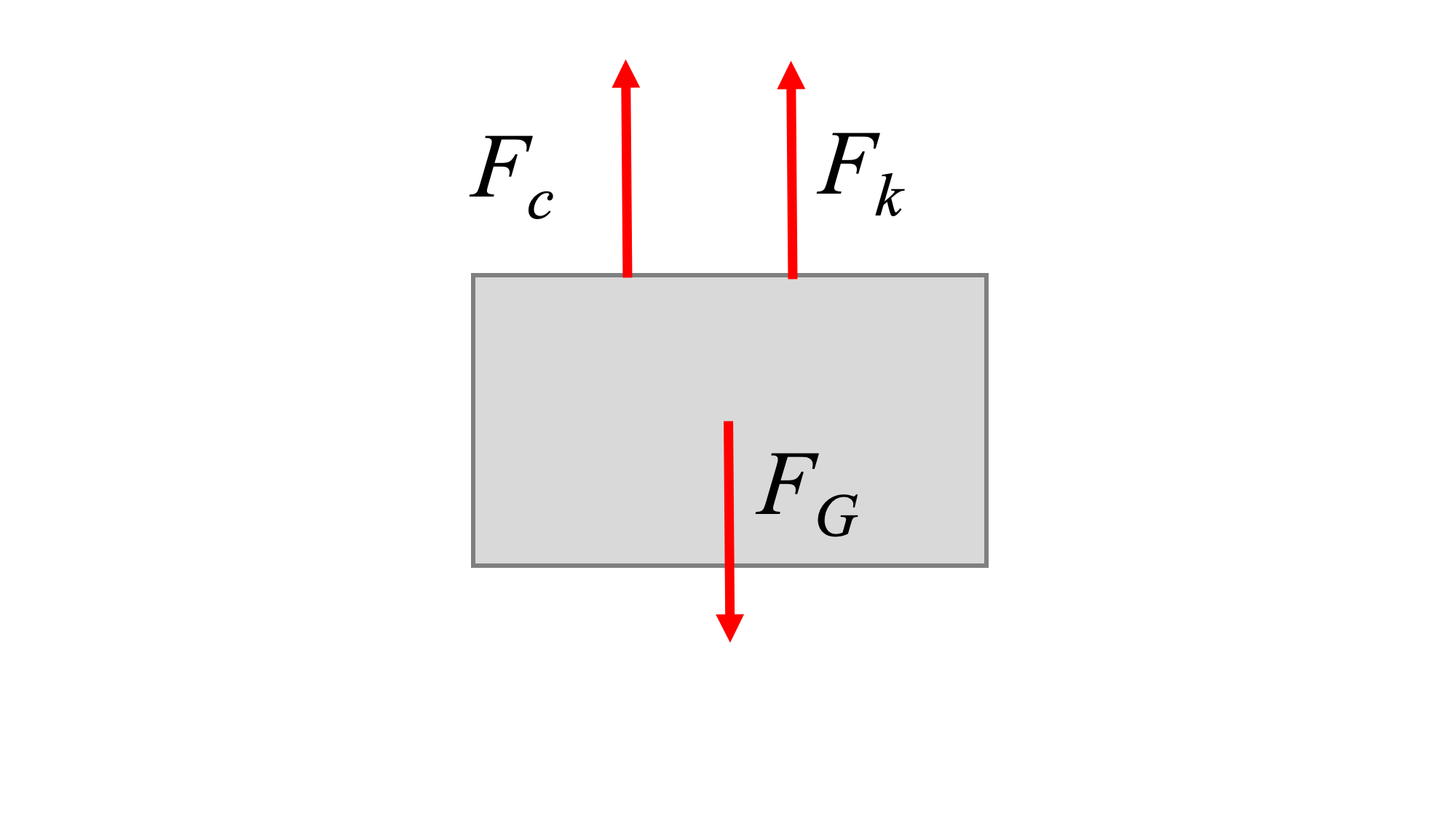
Para determinar la ecuación de movimiento del sistema, dibujamos un diagrama de cuerpo libre del sistema con perturbación y aplicamos la Segunda Ley de Newton.
El proceso para encontrar la ecuación de movimiento del sistema es nuevamente:
- Dibuje el sistema con una pequeña perturbación positiva (\(x\)o\(\theta\)).
- Dibuja el diagrama de cuerpo libre del sistema perturbado. Asegúrese de que la fuerza del resorte y la fuerza del amortiguador tengan direcciones opuestas a la perturbación.
- Encuentra la única ecuación de movimiento para el sistema en la coordenada perturbada usando la Segunda Ley de Newton. Mantenga la misma dirección positiva para la posición y asigne aceleración positiva en la misma dirección.
- Mueva todos los términos de la ecuación a un lado y verifique que todos los términos sean positivos. Si todos los términos no son positivos, hay un error en la dirección de desplazamiento, aceleración y/o fuerza del resorte o amortiguador.
Para el sistema de ejemplo anterior, con masa\(m\), constante de resorte\(k\) y constante de amortiguación\(c\), derivamos lo siguiente:
\[ \sum F_x = m a_x = m \ddot{x} \]
\[ -F_k - F_c = m \ddot{x} \]
\[ -kx - \dot{c(x)} = m \ddot{x} \]
\[ m \ddot{x} + \dot{c(x)} + kx = 0 \]
Esto nos da una ecuación diferencial que describe el movimiento del sistema. Podemos reescribirlo en forma normal:
\[ m \ddot{x} + c \dot{x} + kx = 0 \]
\[ \Rightarrow \ddot{x} + \frac{c}{m} \dot{x} + \frac{k}{m} x = 0 \]
\[ \Rightarrow \ddot{x} + 2 \zeta \omega_n \dot{x} + \omega_n^2 x = 0 \]
Como antes, al término\(\omega_n\) se le llama la frecuencia natural angular del sistema, y tiene unidades de rad/s.
\[ \omega_n ^2 = \frac{k}{m}\, ; \quad \omega_n = \sqrt{\frac{k}{m}} \]
\(\zeta\)(zeta) se llama la relación de amortiguación. Se trata de un término adimensional que indica el nivel de amortiguación, y por tanto el tipo de movimiento del sistema amortiguado.
\[ \zeta = \frac{c}{c_c} = \frac{\text{actual damping}}{\text{critical damping}} \]
La expresión para amortiguación crítica proviene de la solución de la ecuación diferencial. La solución a la ecuación diferencial del sistema es de la forma
\[ x(t) = a e^{rt}, \]
donde\(a\) es constante y el valor o valores de\(r\) pueden ser pueden obtenerse diferenciando esta forma general de la solución y sustituyéndola en la ecuación de movimiento.
\[ m r^2 e^{rt} + c r e^{rt} + k e^{rt} = 0 \]
\[ \Rightarrow (mr^2 + cr + k) e^{rt} = 0 \]
Debido a que el término exponencial nunca es cero, podemos dividir ambos lados por ese término y obtener:
\[ m r^2 + cr + k = 0. \]
Usando la fórmula cuadrática, podemos encontrar las raíces de la ecuación:
\[ r_{1,2} = \frac{-c \pm \sqrt{c^2 - 4mk}}{2m} \]
La amortiguación crítica ocurre cuando el término bajo el signo de raíz cuadrada es igual a cero:
\[ c_c ^2 = 4 mk \]
\[ c_c = 2 \sqrt{mk} = 2 m \omega_n \]
Cuatro estuches viscosos de amortiguación:
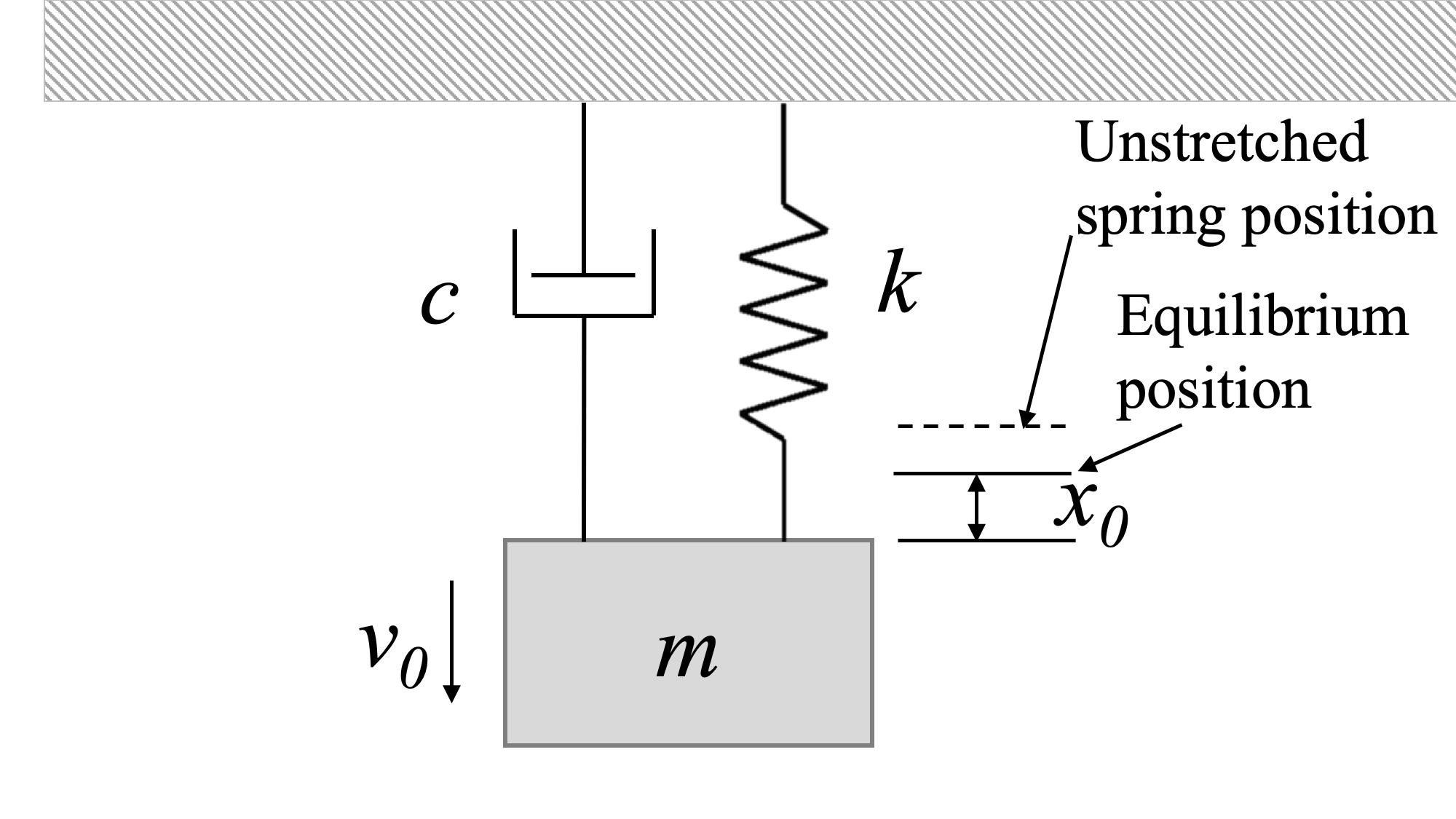
Hay cuatro casos básicos para la relación de amortiguación. Para las soluciones que siguen en cada caso, asumiremos que el desplazamiento de perturbación inicial del sistema es\(x_0\) y la velocidad de perturbación inicial del sistema es\(v_0\).
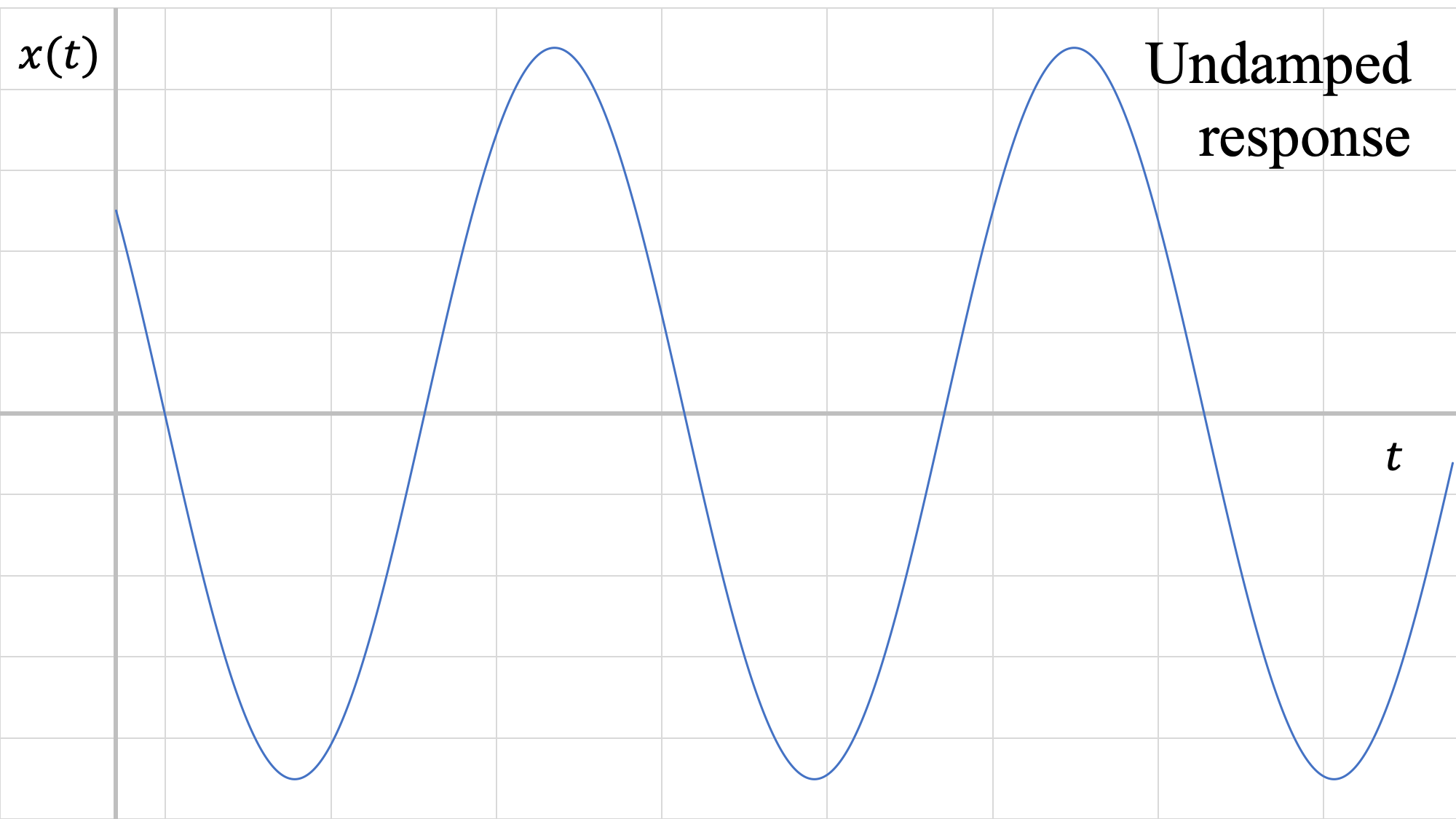
1. \(\zeta = 0\): Sin amortiguar
\[ c = 0 \]
Este es el caso cubierto en el apartado anterior. Los sistemas no amortiguados oscilan continuamente alrededor de la posición de equilibrio, a menos que se aplique alguna otra fuerza.
2. \(\zeta > 1\): Sobrehumedecido
\[ c^2 > 4 mk \]
Las raíces son tanto reales como negativas, pero no iguales entre sí. Los sistemas sobreamortiguados se mueven lentamente hacia el equilibrio sin oscilar.
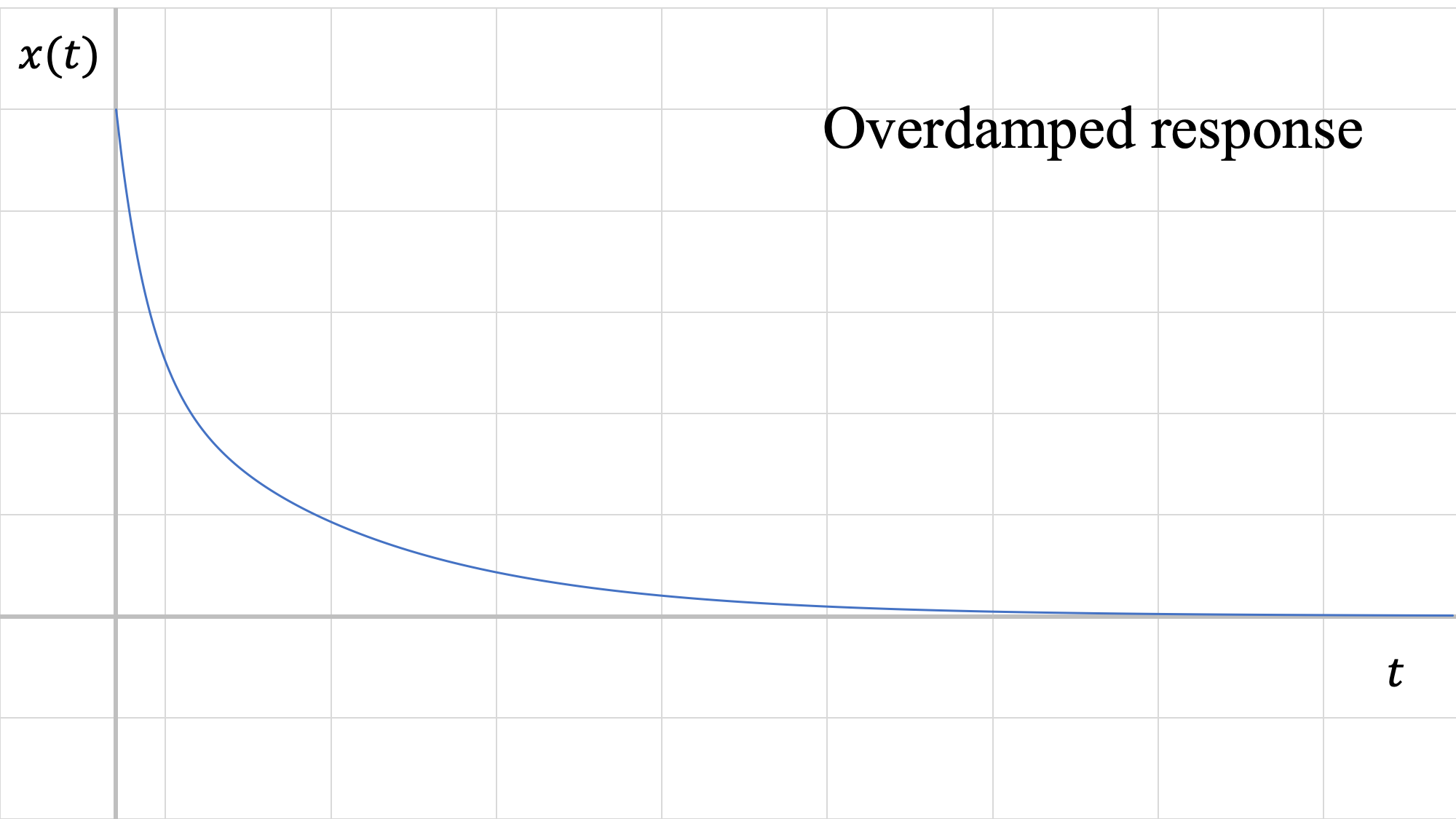
La respuesta para un sistema sobreamortiguado es:
\[ x(t) = a_1 e^{ \left( \frac{-c + \sqrt{c^2 - 4mk}}{2m} \right) t} + a_2 e^{ \left( \frac{-c - \sqrt{c^2 - 4mk}}{2m} \right) t}, \]
\[ \text{where} \,\, a_1 = \frac{-v_0 + r_2 x_0}{r_2 - r_1} \,\, \text{and} \,\, a_2 = \frac{v_0 + r_1 x_0}{r_2 - r_1}. \]
3. \(\zeta = 1\): Amortiguado críticamente
\[ c^2 = 4 mk ( = c_c^2) \]
Las raíces son reales y ambas iguales a\(- \omega_n\). Los sistemas amortiguados críticamente permitirán el retorno más rápido al equilibrio sin oscilación.
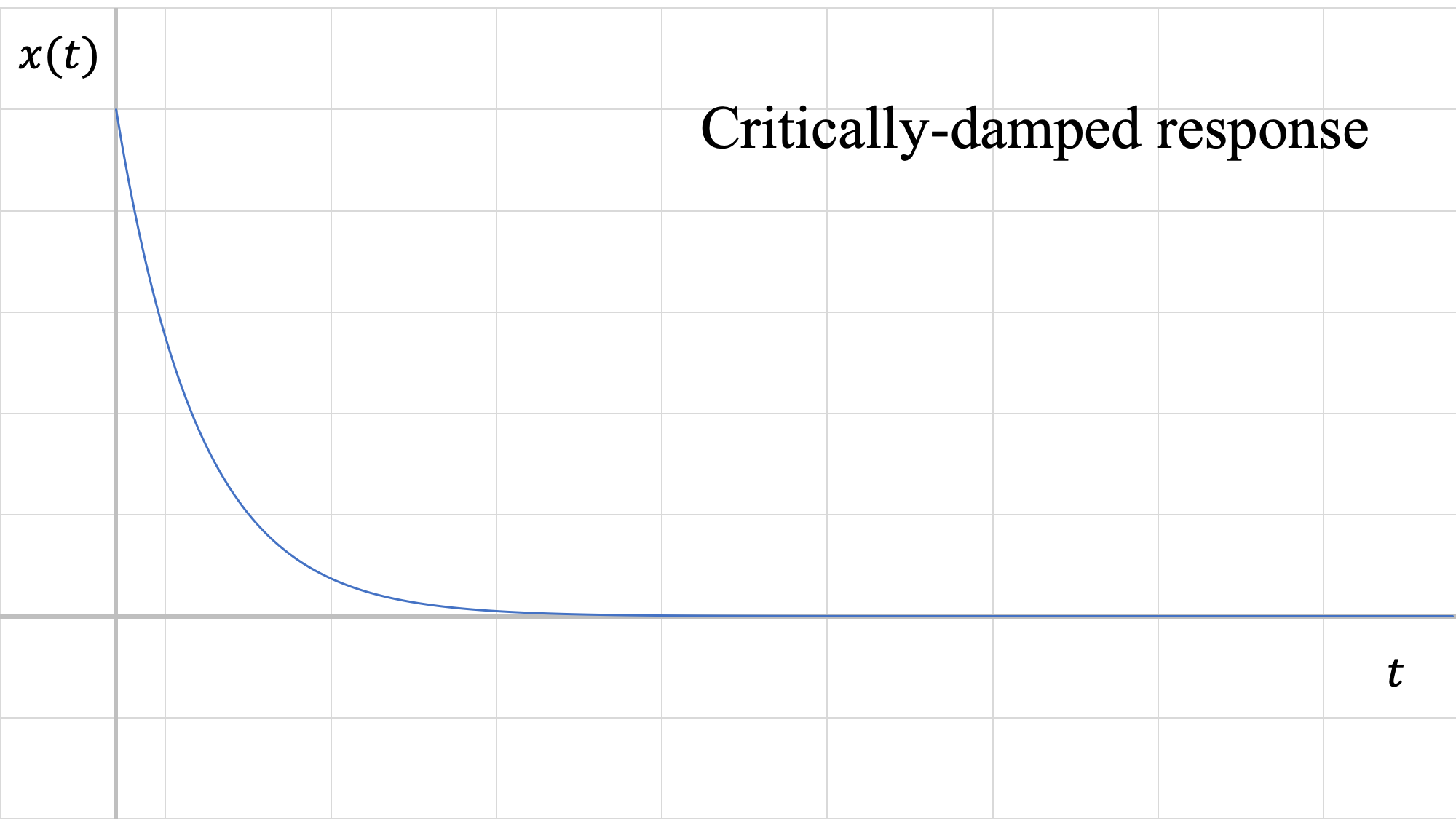
La solución para un sistema amortiguado críticamente es:
\[ x(t) = (A + Bt) e^{-\omega_n t} , \]
\[ \text{where} \,\, A = x_0 \,\, \text{and} \,\, B = v_0 + x_0 \omega_n. \]
4. \(\zeta < 1\): Subamortiguado
\[ c^2 < 4 mk \]
Las raíces son números complejos. Los sistemas subamortiguados oscilan alrededor del punto de equilibrio; a diferencia de los sistemas no amortiguados, la amplitud de las oscilaciones disminuye hasta que el sistema finalmente deja de moverse en la posición de equilibrio.
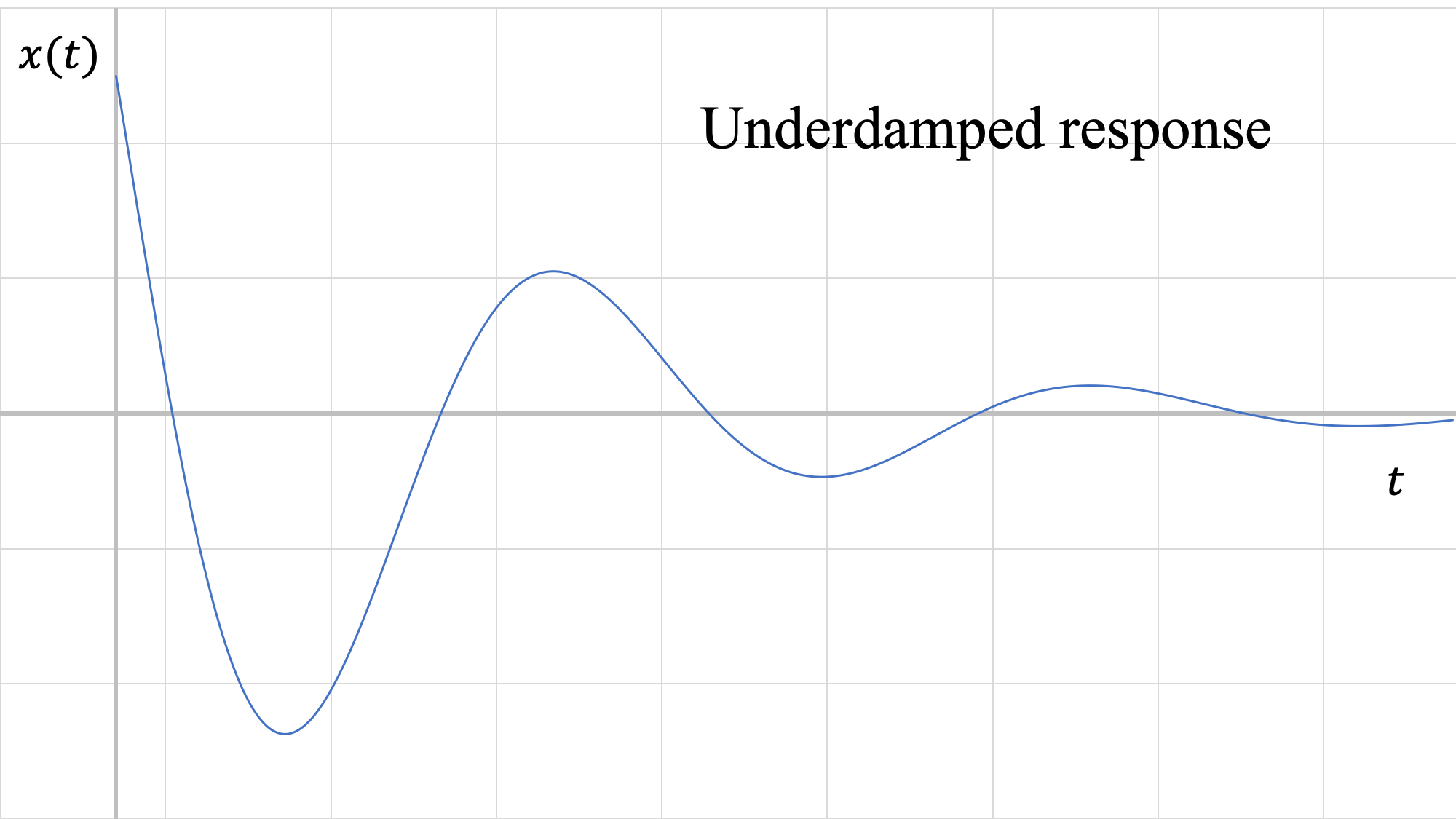
La solución para un sistema de amortiguación insuficiente es:
\[ x(t) = [ C_1 \sin (\omega_d t) + C_2 \cos (\omega_d t) ] e^{- \omega_n \zeta t} , \]
\[ \text{where} \,\, C_1 = \frac{v_0 + \omega_n \zeta x_0}{\omega_d}, \,\, C_2 = x_0, \,\, \text{and} \,\, \zeta = \frac{c}{2 m \omega_n}. \]
\(\omega_d\)se llama la frecuencia natural amortiguada del sistema. Siempre es menor que\(\omega_n\):
\[ \omega_d = \omega_n \sqrt{1 - \zeta^2}. \]
El período de la respuesta subamortiguada también difiere de la respuesta no amortiguada.
\[ \text{Undamped:} \quad \tau_n = \frac{2 \pi}{\omega_n} \]
\[ \text{Underdamped:} \quad \tau_d = \frac{2 \pi}{\omega_d} \]
Comparación de Estuches de Amortiguación Viscosa:
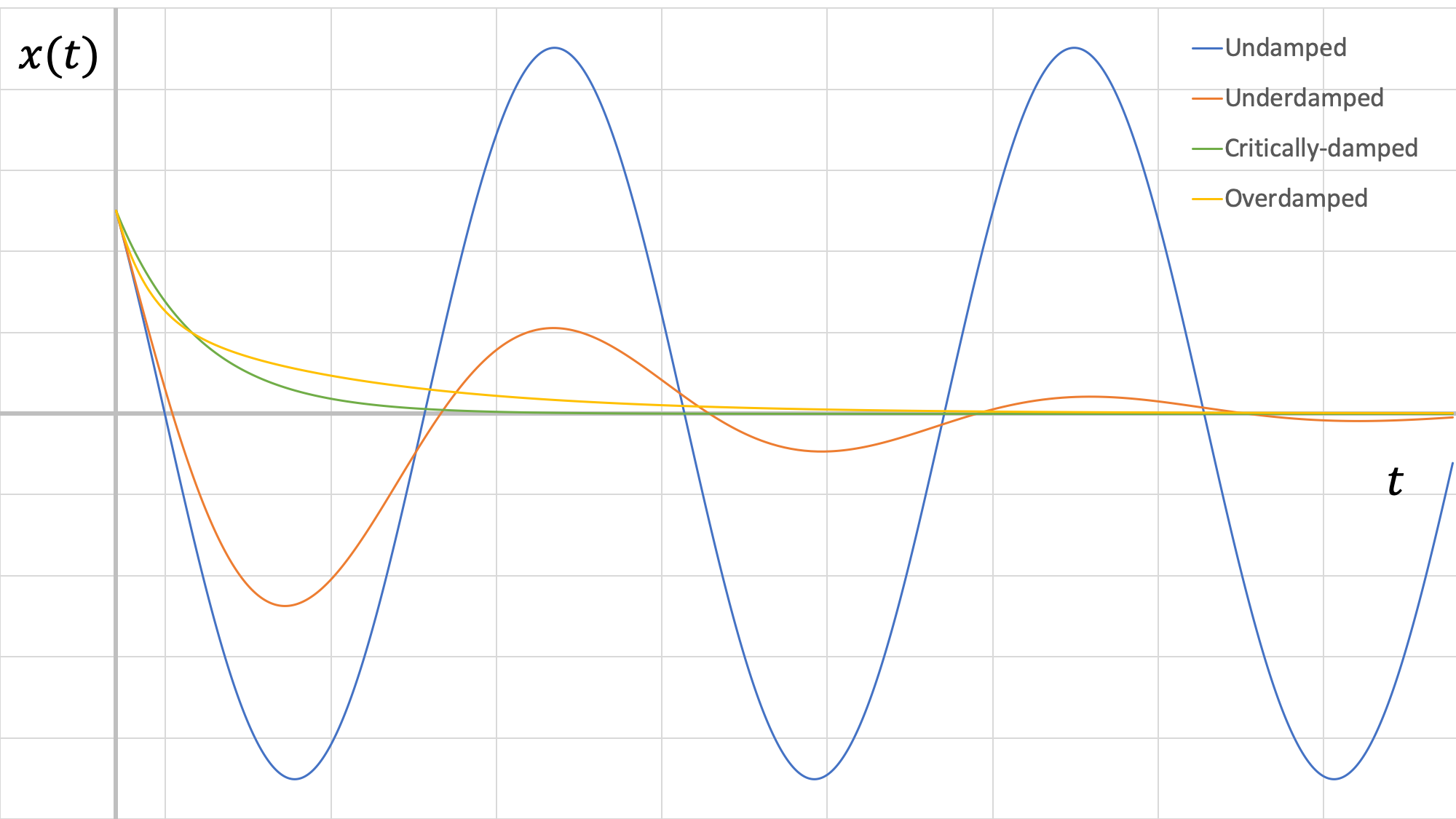
En la figura anterior, podemos ver que la respuesta críticamente amortiguada da como resultado que el sistema vuelva al equilibrio más rápido. Además, podemos ver que la amplitud del sistema subamortiguado está bastante atenuada en comparación con la caja no amortiguada.