7.6: Computadoras Reversibles y Ruido
- Page ID
- 84447
Sin embargo, las computadoras reversibles siguen siendo extremadamente controvertidas en los círculos de ingeniería La captura es el ruido. El teorema de Shannon, por ejemplo, requiere\(E_{min} = k_{B}T\ln(2)\) para la transmisión de un bit de información en un canal ruidoso. Esto se aplica incluso en un sistema reversible como la puerta de colisión de bolas de billar. De hecho, las puertas de bola de billar son extremadamente sensibles a los errores. Ante un ligero error en la trayectoria o sincronización de una pelota y una computadora de bola de billar acumularía una gran cantidad de errores.
Una computadora de bola de billar podría hacerse más robusta y resistente al ruido al incluir trincheras para guiar las bolas. Pero la trinchera guía las bolas disipando ese componente del impulso de la pelota que de otro modo la alejaría de su trayectoria diseñada. Así, las trincheras conducen inevitablemente a la disipación de energía.
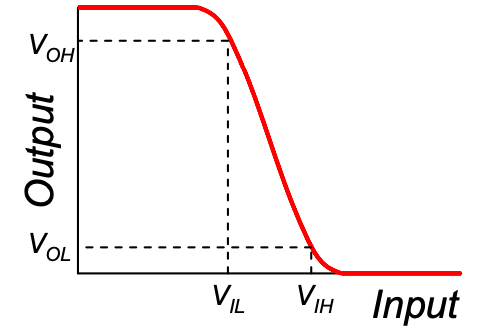
Por el contrario, veamos brevemente el ruido en los circuitos CMOS. La función de transferencia de un inversor CMOS se muestra en la Figura\(\PageIndex{1}\). Vemos que cerca del voltaje de conmutación, el inversor tiene ganancia muy grande,\(A_{V}\):
\[ A_{V} = \frac{dV_{out}}{dV_{in}} \gg 1 \label{7.6.1} \]
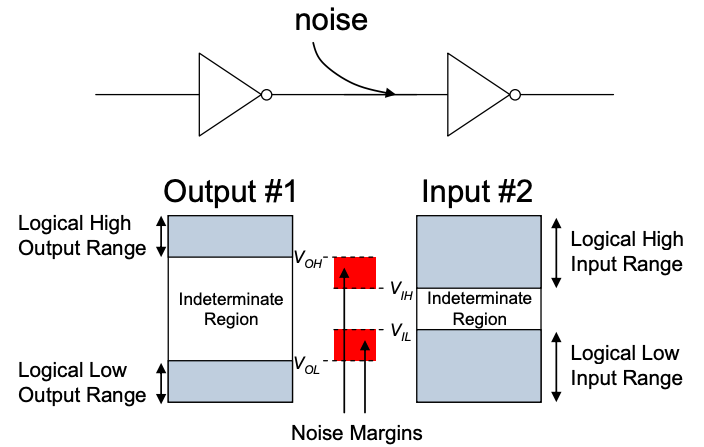
La ganancia protege el inversor contra el ruido. Por ejemplo, considere dos inversores en cascada. Supongamos que se agrega algo de ruido a la salida del primer inversor. El margen de ruido nos indica la cantidad mínima de ruido requerida para provocar un error en la salida del segundo inversor; ver Figura\(\PageIndex{2}\).
Así, muchos ingenieros de dispositivos argumentan que sin ganancia ningún sistema de cómputos es práctico. Y dado que las computadoras reversibles no disipan la energía no está claro cómo pueden amplificar una señal, haciéndolas siempre sujetas a los efectos adversos del ruido.