
3.2: Ecuaciones Autónomas de Primer Orden
- Page ID
- 118974

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En esta sección revisaremos las técnicas para estudiar la estabilidad de las ecuaciones autónomas no lineales de primer orden. Luego ampliaremos este estudio para observar familias de ecuaciones de primer orden que están conectadas a través de un parámetro
Recordemos que se da una ecuación autónoma de primer orden en la forma
\[\dfrac{dy}{dt} = f(y). \nonumber \]
Asumiremos que\(f\) y\(\dfrac{\partial f}{\partial y}\) son funciones continuas de\(y\), para que sepamos que existen soluciones de problemas de valor inicial y son únicas.
Recordaremos los métodos cualitativos para estudiar ecuaciones autónomas considerando el ejemplo
\[\dfrac{d y}{d t}=y-y^{2} \label{3.3} \]
Esto es sólo un ejemplo de una ecuación logística.
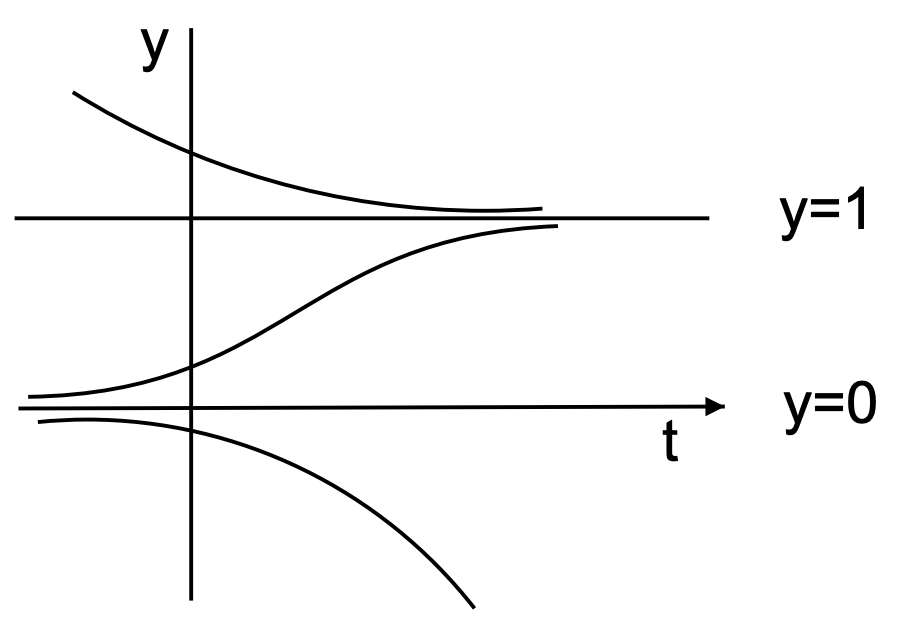
Primero, se determina el equilibrio, o constante, soluciones dadas por\(y^{\prime}= 0\). Para este caso, tenemos\(y-y^{2}=0\). Entonces, las soluciones de equilibrio son\(y=0\) y\(y=1\). Al esbozar estas soluciones, dividimos el\(t y\) plano en tres regiones. Las soluciones que se originan en una de estas regiones\(t=t_{0}\) permanecerán en esa región para todos\(t>t_{0}\) ya que las soluciones no pueden cruzarse. [Tenga en cuenta que si dos soluciones se cruzan entonces tienen valores comunes\(y_{1}\) a la vez\(t_{1}\). Usando esta información, podríamos establecer un problema de valor inicial para el cual es la condición inicial\(y\left(t_{1}\right)=y_{1}\). Dado que las dos soluciones diferentes se cruzan en este punto en el plano de fase, tendríamos un problema de valor inicial con dos soluciones diferentes correspondientes a la misma condición inicial. Esto contradice la suposición de singularidad señalada anteriormente. Dejaremos al lector para que explore esto más a fondo en la tarea.]
A continuación, determinamos el comportamiento de las soluciones en las tres regiones. Al señalar que\(d y / d t\) da la pendiente de cualquier solución en el plano, entonces encontramos que las soluciones son monótonas en cada región. Es decir, en regiones donde\(d y / d t>0\), tenemos funciones monótonamente crecientes. Esto lo determinamos desde el lado derecho de nuestra ecuación.
Por ejemplo, en este problema\(y-y^{2}>0\) sólo para la región media y\(y-y^{2}<0\) para las otras dos regiones. Así, la pendiente es positiva en la región media, dando una solución ascendente como se muestra en la Figura 3.1. Tenga en cuenta que esta solución no cruza las soluciones de equilibrio. Se pueden hacer declaraciones similares sobre las soluciones en las otras regiones.
Observamos además que las soluciones a ambos lados de\(y = 1\) tienden a acercarse a esta solución de equilibrio para grandes valores de\(t\). De hecho, no importa lo cerca que esté uno\(y = 1\), eventualmente uno se acercará a esta solución como\(t → ∞\). Entonces, la solución de equilibrio es una solución estable. De igual manera, vemos que\(y = 0\) es una solución de equilibrio inestable.
Si solo nos interesa el comportamiento de las soluciones de equilibrio, podríamos simplemente construir una línea de fase. En la Figura 3.2 colocamos una línea vertical a la derecha de la gráfica\(ty\) -plano. En esta línea, primero se colocan puntos en las soluciones de equilibrio correspondientes y se etiquetan las soluciones. Estos puntos en las soluciones de equilibrio son puntos finales para tres intervalos. En cada intervalo se colocan entonces flechas apuntando hacia arriba (hacia abajo) indicando soluciones con pendientes positivas (negativas). Mirando la línea de fase, ahora se puede determinar si un equilibrio dado es estable (flechas apuntando hacia el punto) o inestable
(flechas que apuntan lejos del punto). En la Figura 3.3 dibujamos la línea de fase final por sí misma.
