
10.1: Señales y Ruido
- Page ID
- 69353

Cuando hacemos una medición es la suma de dos partes, una contribución determinada o fija que surge del analito y una contribución indeterminada, o aleatoria, que surge de la incertidumbre en el proceso de medición. Llamamos al primero de estos la señal y llamamos a este último el ruido. Hay dos categorías amplias de ruido: la asociada con la obtención de muestras y la asociada con la realización de mediciones. Nuestro interés aquí está en este último.
¿Qué es el ruido?
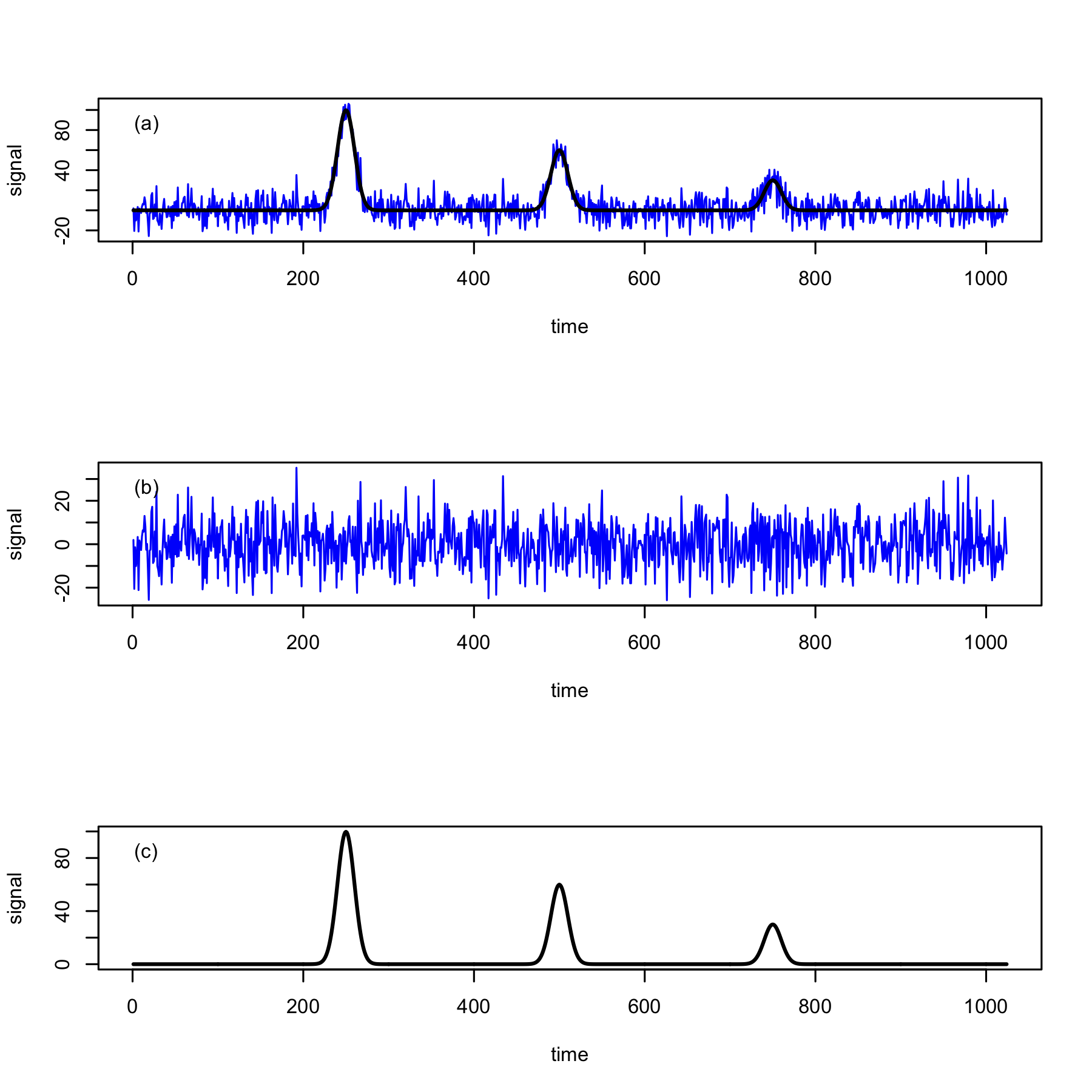
El ruido es un evento aleatorio caracterizado por una media y desviación estándar. Hay muchos tipos de ruido, pero nos limitaremos por ahora al ruido que es estacionario, en que su media y su desviación estándar son independientes del tiempo, y eso es heteroscedástico, en que su media y su varianza (y desviación estándar) son independientes de la magnitud de la señal. La figura\(\PageIndex{1a}\) muestra un ejemplo de una señal ruidosa que cumple con estos criterios. El eje x aquí se muestra como tiempo, tal vez un cromatograma, pero otras unidades, como la longitud de onda o el potencial, son posibles. La figura\(\PageIndex{1b}\) muestra el ruido subyacente y la figura\(\PageIndex{1c}\) muestra la señal subyacente. Obsérvese que el ruido en la Figura\(\PageIndex{1b}\) aparece consistente en su tendencia central (media) y su dispersión (varianza) a lo largo del eje x y es independiente de la intensidad de la señal.
¿Cómo caracterizamos la señal y el ruido?
Aunque caracterizamos el ruido por su media y su desviación estándar, el punto de referencia más importante es la relación señal/ruido\(S/N\), que definimos como
\[S/N = \frac{S_\text{analyte}}{s_\text{noise}} \nonumber\]
donde\(S_\text{analyte}\) es el valor de la señal en una ubicación particular en el eje x y\(s_\text{noise}\) es la desviación estándar del ruido usando una porción libre de señal de los datos. Como regla general, podemos medir la señal con cierta confianza cuando\(S/N \ge 3\) y podemos detectar la señal con cierta confianza cuando\(3 \ge S/N \ge 2\). Para los datos de la Figura\(\PageIndex{1}\), y utilizando la información en el subtítulo de la figura, las relaciones señal/ruido son, de izquierda a derecha, 10, 6 y 3.
Medir la señal con confianza implica que podemos usar el valor de la señal en un cálculo, como construir una curva de calibración. Detectar la señal con confianza significa que estamos seguros de que una señal está presente (y que está presente un analito responsable de la señal) aunque no podamos medir la señal con suficiente confianza para permitir un cálculo significativo.
¿Cómo podemos mejorar la\(S/N\) relación?
Hay dos enfoques amplios que podemos usar para mejorar la relación señal/ruido: hardware y software. Los enfoques de hardware están integrados en el instrumento e incluyen decisiones sobre cómo se configura el instrumento para realizar mediciones (por ejemplo, la elección de una velocidad de escaneo o un ancho de hendidura) y cómo procesa la señal por el instrumento (por ejemplo, usando filtros electrónicos); tales soluciones no son de interés para nosotros aquí en un libro de texto con enfoque en quimiometría. Las soluciones de software son enfoques computacionales en los que manipulamos los datos ya sea mientras los estamos recopilando o después de que se complete la adquisición de datos.