
4.5: Tacto- La Piel
- Page ID
- 124516
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)El tacto puede venir de muchas formas: presión, vibración, estiramiento, movimiento, bordes, puntos, etc. Los receptores en la piel permiten la percepción de estas diferentes características, y cuando esta información se combina en el sistema nervioso central, somos capaces de determinar la ubicación, fuerza, duración, movimiento, forma, y textura del objeto interactuando con la piel.
Receptores
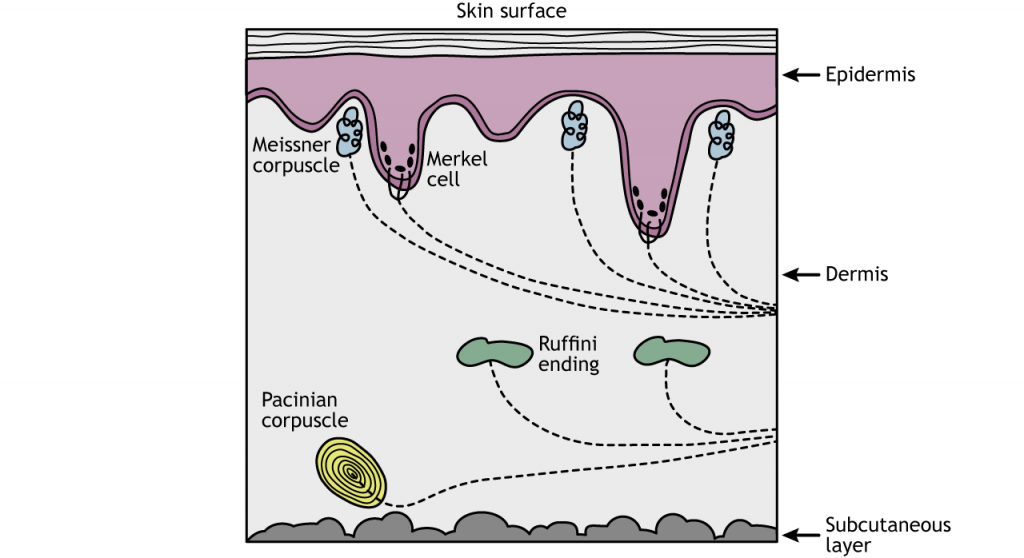
Podemos sentir diferentes modalidades de tacto por la presencia de receptores sensoriales especializados, llamados mecanorreceptores, ubicados en la piel.
Los corpúsculos pacinianos se localizan profundamente en la dermis de la piel y son responsables de la percepción de la vibración.
Las terminaciones Ruffini detectan estiramiento de la piel y también se localizan dentro de la capa dérmica de la piel.
Los corpúsculos Meissner son estimulados por el movimiento de la piel y se localizan en la capa de la epidermis.
Las células de Merkel se encuentran en el límite entre la dermis y la epidermis y están especializadas para detectar bordes y puntos.
Campos Receptivos
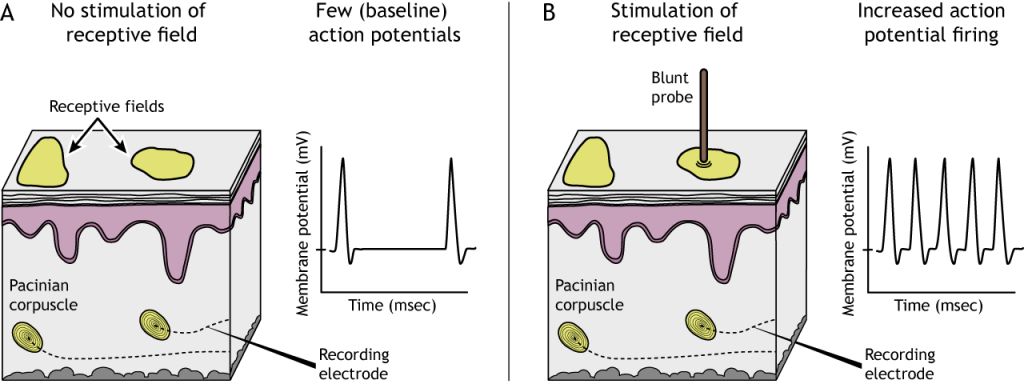
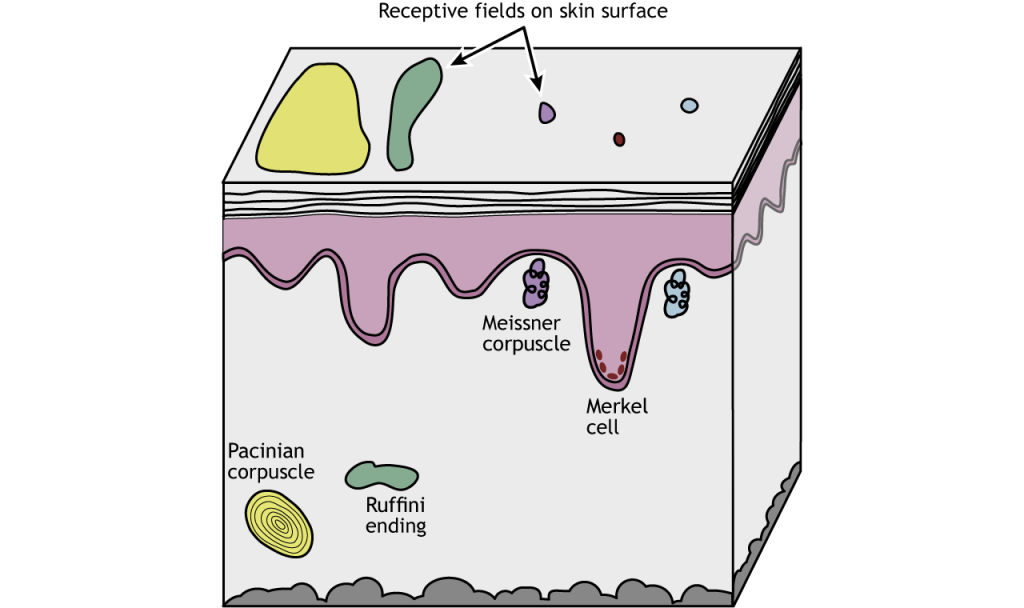
Cada mecanorreceptor responde a un estímulo táctil en una zona específica de la piel, una región llamada campo receptivo del receptor. Cuando se toca el campo receptivo, se activará el mecanorreceptor.
Tamaño de Campo Receptivo
Las células de Merkel y los corpúsculos de Meissner, ambos ubicados cerca de la superficie de la piel, tienen pequeños campos receptivos. Las terminaciones de ruffini y los corpúsculos pacinianos, localizados más profundamente en las capas de la piel, tienen campos receptivos más grandes que las células de Merkel y los corpúsculos de Meissner.
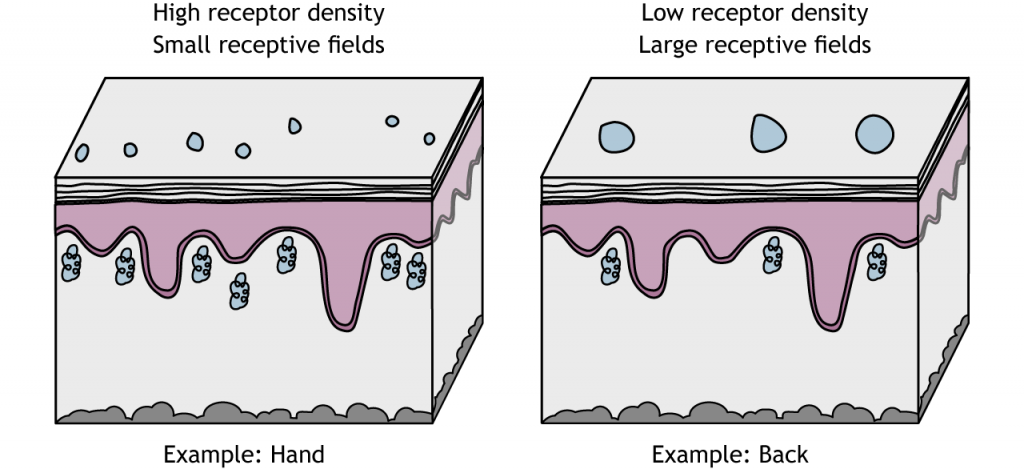
Los tamaños de campo receptivo son diferentes entre los diferentes mecanorreceptores, pero también varían entre las diferentes regiones del cuerpo. Incluso dentro de un tipo de receptor (por ejemplo, los corpúsculos de Meissner), los campos receptivos en regiones como los dedos o los labios son más pequeños que en regiones como la espalda o la pierna. Esto nos permite tener una resolución espacial más fina con la localización e identificación de objetos usando nuestros dedos. Los campos receptivos más pequeños en estas regiones son el resultado de una mayor densidad de receptores en la piel.
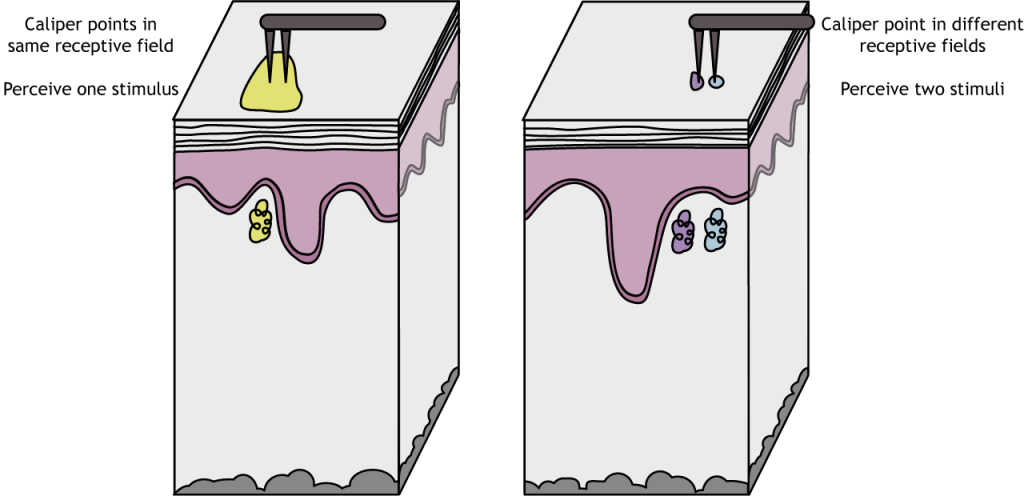
Discriminación de dos puntos
Los tamaños de campo receptivos son importantes porque nos permiten ubicar un estímulo en nuestro cuerpo. Los campos receptivos más grandes no son tan precisos como los campos receptivos más pequeños. Una medida del tamaño del campo receptivo es la discriminación de dos puntos (¡pruébalo en casa! ), que determina la distancia mínima necesaria entre dos estímulos para percibir dos puntos separados en la piel y no uno. La mano tiene un umbral menor para discernir entre dos puntos que el dorso, resultado de los diferentes tamaños en campos receptivos.
Tasa de Adaptación
Otra característica importante de los receptores sensoriales somáticos es la de la tasa de adaptación. Las fibras que se están adaptando lentamente muestran un potencial de acción disparando durante todo el tiempo que un estímulo está presente. Las células de Merkel y las terminaciones Ruffini son fibras que se adaptan lentamente. Las fibras de adaptación lenta son las más útiles para determinar la presión y la forma de un estímulo.
Animación 22.1. Adaptación lenta de mecanorreceptores continuando disparando potenciales de acción a lo largo de la duración de un estímulo. A medida que el estímulo pasa de no presente, a débil, a fuerte, la acción potencial de disparo de los Ruffini poniendo fin a los incendios a lo largo de todo el estímulo. 'Receptor de adaptación lenta' por Casey Henley está bajo una Licencia Creative Commons Atribución No Comercial Compartir Igual (CC BY-NC-SA) 4.0 Internacional. Ver imagen estática de animación.
Las fibras que se adaptan rápidamente disparan potenciales de acción cuando un estímulo cambia (p. ej., comienza, se detiene, se vuelve más fuerte o más débil) pero no cuando un estímulo es constante. Este disparo hace que las fibras de rápida adaptación estén especializadas para detectar movimiento y vibración. Los corpúsculos Meissner y Pacinian se están adaptando rápidamente.
Animación 22.2. Adaptación rápida de mecanorreceptores disparando potenciales de acción cuando cambia la fuerza del estímulo. A medida que el estímulo pasa de no presente, a débil, a fuerte, el disparo potencial de acción del corpículo paciniano solo se dispara cuando el estímulo cambia de fuerza. 'Receptor de Adaptación Rápida' por Casey Henley está bajo una Licencia Creative Commons Atribución No Comercial Compartir Igual (CC BY-NC-SA) 4.0 International License. Ver imagen estática de animación.
Transducción Sensorial
En capítulos anteriores discutimos los canales iónicos que están cerrados por cambios de voltaje en la neurona y canales que están cerrados por neurotransmisores. En el sistema somatosensorial, encontramos canales iónicos que están cerrados por distorsión física o estiramiento de la membrana. Estos canales pueden abrirse por estiramiento de la propia membrana o indirectamente a través del movimiento de proteínas intra o extracelulares que están unidas a los canales. El sodio y el calcio fluyen hacia la célula, provocando tanto una despolarización como la iniciación de cascadas de segundos mensajeros. Si se aplica suficiente estímulo, la despolarización alcanza el umbral del axón y se envía un potencial de acción hacia la médula espinal.
Animación 22.3. Los mecanorreceptores responden a estímulos táctiles a través de canales catiónicos no selectivos regulados por estiramiento. Los canales pueden abrirse debido al estiramiento de la membrana misma que estira el canal abierto o debido a proteínas asociadas con los canales que tiran del canal abierto. 'Stretch-Gated Ion Channels' por Casey Henley está bajo una Licencia Creative Commons Atribución No Comercial Compartir Igual (CC BY-NC-SA) 4.0 Internacional. Ver imagen estática de animación.
Claves para llevar
- Existen múltiples tipos de mecanorreceptores en la piel que son activados por diferentes tipos de estímulos táctiles
- El tamaño del campo receptivo difiere entre los tipos de mecanorreceptores
- La tasa de adaptación difiere entre los tipos de mecanorreceptores
- El campo receptivo es una región de la piel que activa un mecanorreceptor dado
- El tamaño del campo receptivo para un tipo específico de mecanorreceptor puede variar en tamaño en todo el cuerpo
- Los mecanorreceptores expresan canales iónicos no selectivos regulados por estiramiento que despolarizan la célula durante la transducción sensorial
¡Ponte a prueba!
Un elemento H5P interactivo ha sido excluido de esta versión del texto. Puedes verlo en línea aquí:
https://openbooks.lib.msu.edu/neuroscience/?p=493#h5p-21
Revisión adicional
Describir la relación entre densidad de receptores, campos receptivos y discriminación de dos puntos.
RESPUESTAS
Versión en video de la lección

Un elemento de YouTube ha sido excluido de esta versión del texto. Puedes verlo en línea aquí: https://openbooks.lib.msu.edu/neuroscience/?p=493