
2.3: Sidebar- Ley de Moore
- Page ID
- 155575
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)La tecnología avanza y las computadoras son cada vez más rápidas cada año. Los consumidores a menudo no están seguros de comprar el modelo actual de teléfonos inteligentes, tabletas o PC porque pronto saldrá un modelo más avanzado, dejándolos con pesar de que ya no será el más avanzado. Gordon Moore, cofundador de Fairchild y uno de los fundadores de Intel, reconoció este fenómeno en 1965, señalando que los recuentos de transistores de microprocesador se habían duplicado cada año. Su perspicacia finalmente se convirtió en la Ley de Moore, que establece que el número de transistores en un chip se duplicará cada dos años. (Moore, 1965). Esto se ha generalizado en el concepto de que la potencia informática se duplicará cada dos años por el mismo precio. Otra forma de ver esto es pensar que el mismo precio de la potencia informática se reducirá a la mitad cada dos años. Aunque muchos han pronosticado su desaparición, la Ley de Moore se ha mantenido durante más de cincuenta y cinco años. La tecnología está cambiando con la innovación en diseño y soporte de IA. Los expertos ahora creen,
“El nombre del juego ahora es la tecnología puede no ser transistores de silicio tradicionales; ahora puede ser la computación cuántica, que es una estructura diferente y nano-biotecnología, que consiste en proteínas y enzimas que son orgánicas”.
Por lo tanto es como ly en los próximos cinco años, cambiará el énfasis de la Ley de Moore. Los expertos creen que la ley de Moore no podrá continuar indefinidamente debido a los límites físicos para reducir continuamente el tamaño de los componentes en un chip. Actualmente, los miles de millones de transistores en los chips no son visibles a simple vista. Se piensa que si la ley de Moore continuara hasta 2050, los ingenieros tendrían que diseñar transistores a partir de componentes que son más pequeños que un solo átomo de hidrógeno.
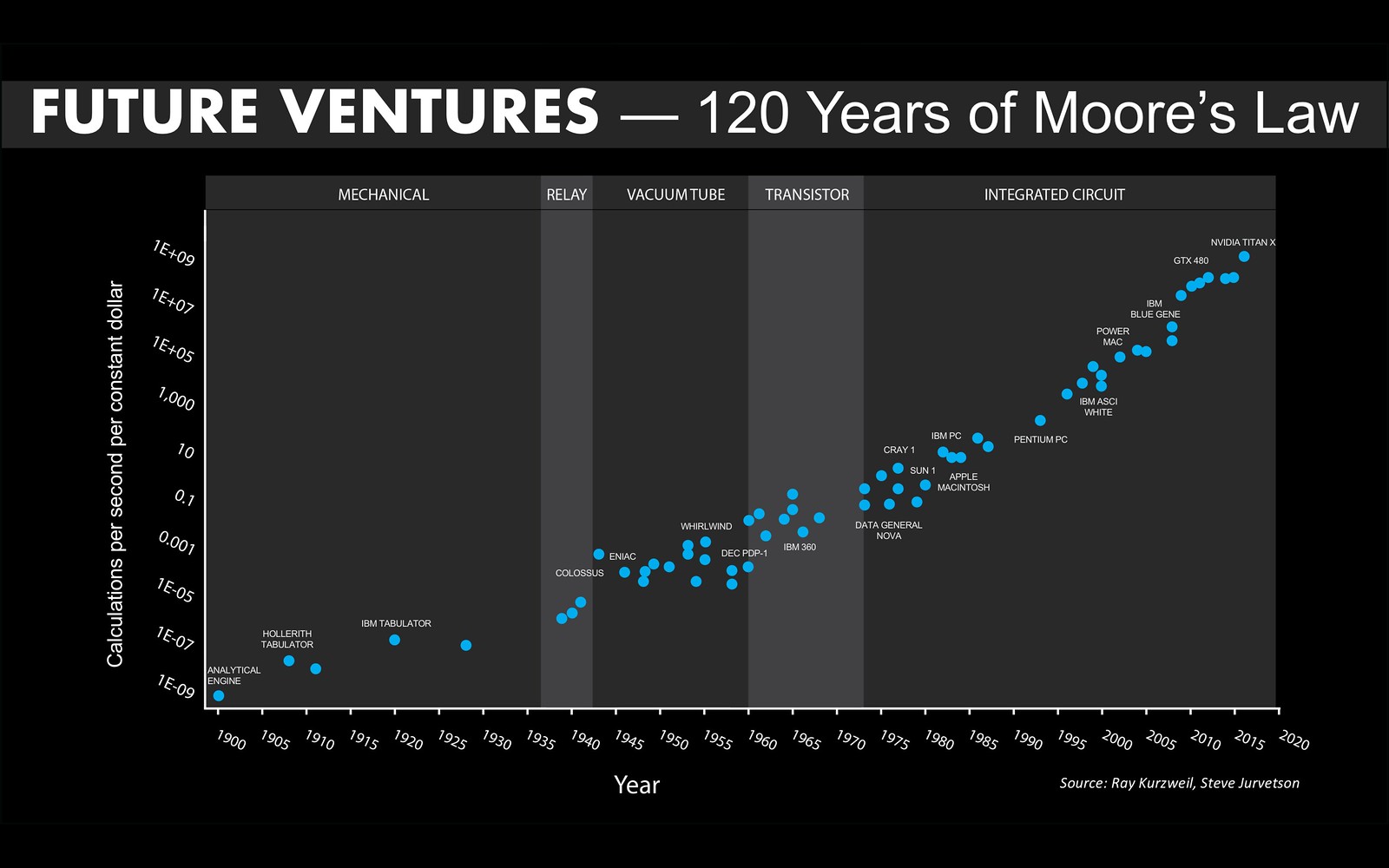
Esta cifra representa la relación empírica de la ley de Moore vinculada al número de transistores en un circuito integrado denso que se duplica aproximadamente cada dos años.
Habrá un punto, algún día, en el que lleguemos a la cúspide de la tecnología de procesamiento a medida que se presenten desafíos para avanzar para reducir los circuitos en el momento de crecimiento exponencial se volverán más caros. La Ley de Moore quedará entonces desactualizada debido a la innovación tecnológica. Los ingenieros continuarán esforzándose por nuevas formas de aumentar el rendimiento (Moore, 1965).
Placa base
La placa base es el concentrador principal de la placa de circuito del compu ter. El concentrador conecta las entradas y componentes de la computadora. También controla la potencia recibida por el disco duro y la tarjeta de video. La placa base es un componente crucial, que alberga la unidad central de procesamiento (CPU), la memoria y los conectores de entrada y salida. Los componentes de CPU, memoria y almacenamiento, entre otras cosas, se conectan a la placa base. Las placas base vienen en diferentes formas y tamaños; los precios de las placas base también varían dependiendo de la complejidad. La complejidad depende de cuán compacta o expandible esté diseñada para ser la computadora. La mayoría de las placas base modernas tienen muchos componentes integrados, como el procesamiento de video y sonido, que requieren componentes separados.
Memoria de Acceso Aleatorio
Cuando se inicia una computadora, comienza a cargar información del disco duro a su memoria de trabajo. La memoria a corto plazo de su computadora se llama memoria de acceso aleatorio (RAM), que transfiere datos mucho más rápido que el disco duro. Cualquier programa que esté ejecutando en la computadora se carga en la RAM para su procesamiento. La RAM es un componente de alta velocidad que almacena toda la información que la computadora necesita para su uso actual y futuro cercano. Acceder a la RAM es mucho más rápido que recuperarla del disco duro. Para que una computadora funcione de manera efectiva, se debe instalar una cantidad mínima de RAM. En la mayoría de los casos, agregar más RAM permitirá que la computadora funcione más rápido. Al aumentar el tamaño de la RAM, se reduce el número de veces que se lleva a cabo esta operación de acceso, haciendo que la computadora funcione más rápido. Otra característica de la RAM es que es memoria volátil o temporal. Esto significa que puede almacenar datos siempre y cuando reciba energía; cuando la computadora está apagada, se pierde cualquier dato almacenado en la RAM. Es por ello que necesitamos discos duros y SSD que retengan la información cuando apagamos el sistema.
La RAM generalmente se instala en una computadora personal mediante el uso de un módulo de memoria dual en línea (DIMM). El tipo de DIMM aceptado en una computadora depende de la placa base. Como lo describe la Ley de Moore, la cantidad de memoria y las velocidades de los DIMM han aumentado drásticamente a lo largo de los años.
Disco Duro y Disco Duro
Si bien la RAM se usa como memoria de trabajo, la computadora también necesita un lugar para almacenar datos a largo plazo. La mayoría de las computadoras personales actuales utilizan un disco duro para el almacenamiento de datos a largo plazo. Un disco duro es un disco de material magnético; una unidad de disco duro o HDD es el dispositivo para almacenar los datos en un disco duro. El disco es donde se almacenan los datos cuando la computadora se apaga y se recupera de cuando la computadora está encendida. El HDD proporciona mucho almacenamiento a un costo económico en comparación con el SSD.
Unidades de estado sólido
SSD es un dispositivo de nueva generación que reemplaza los discos duros. Son mucho más rápidos y utilizan memoria basada en flash. Los chips semiconductores se utilizan para almacenar datos, no medios magnéticos. Un procesador integrado (o cerebro) lee y escribe datos. El cerebro, llamado controlador, es un factor importante para determinar la velocidad de lectura y escritura. Los SSD están disminuyendo de precio, pero son caros. Los SSD no tienen partes móviles, a diferencia del HDD, que se ocupa del desgaste del giro y se descompone.
Comparación de SSD frente a HDD
Las marcas de verificación representan la mejor selección de la categoría.
|
Atributo |
SSD (unidad de estado sólido) |
HDD (unidad de disco duro) |
|---|---|---|
|
Consumo de energía/duración de la batería |
|
Más consumo de energía— promedia de 6 a 7 vatios y por lo tanto utiliza más batería. |
|
Costo |
Caro, aproximadamente $0.20 por gigabyte (basado en comprar una unidad de 1TB). |
|
|
Capacidad |
Por lo general, no es mayor de 1 TB para unidades de tamaño portátil; 4 TB como máximo para computadoras de escritorio. |
|
|
Tiempo de arranque del sistema operativo |
|
Alrededor de 30-40 segundos promedio de tiempo de arranque. |
|
Ruido |
|
Se pueden escuchar clics audibles y giratorios. |
|
Vibración |
|
El giro de los platos a veces puede resultar en vibración. |
|
Calor Producido |
|
HDD no produce mucho calor, pero tendrá una cantidad medible más calor que un SSD debido a las partes móviles y mayor consumo de energía. |
|
Tasa de Fallos |
|
Tiempo medio entre tasa de fallas de 1.5 millones de horas. |
|
Velocidad de copia/escritura de archivos |
|
El rango puede ser de 50 a 120 MB/s. |
|
Cifrado |
Cifrado de disco completo (FDE) Soportado en algunos modelos. |
|
|
Velocidad de apertura de archivos |
|
Más lento que el SSD. |
|
Magnetismo ¿Afectado? |
|
Los imanes pueden borrar datos. |

Referencia
Moore, Gordon E. (1965). “Acramming más componentes en circuitos integrados” (PDF). Revista Electrónica. p. 4. Recuperado 2012-10-18.