
14.1: Introducción a la Comunicación Digital
- Page ID
- 154589

En el diseño de sistemas digitales grandes y complejos, a menudo es necesario que un dispositivo comunique información digital hacia y desde otros dispositivos. Una ventaja de la información digital es que tiende a ser mucho más resistente a los errores transmitidos e interpretados que la información simbolizada en un medio analógico. Esto explica la claridad de las conexiones telefónicas codificadas digitalmente, los discos compactos de audio y gran parte del entusiasmo en la comunidad de ingeniería por la tecnología de comunicaciones digitales. Sin embargo, la comunicación digital tiene sus propias trampas únicas, y hay multitudes de formas diferentes e incompatibles en las que se puede enviar. Ojalá, este capítulo te ilumine en cuanto a los fundamentos de la comunicación digital, sus ventajas, desventajas y consideraciones prácticas.
Supongamos que se nos da la tarea de monitorear remotamente el nivel de un tanque de almacenamiento de agua. Nuestro trabajo es diseñar un sistema para medir el nivel de agua en el tanque y enviar esta información a un lugar distante para que otras personas puedan monitorearlo. Medir el nivel del tanque es bastante fácil y se puede lograr con varios tipos diferentes de instrumentos, como interruptores de flotador, transmisores de presión, detectores de nivel ultrasónicos, sondas de capacitancia, galgas extensométricas o detectores de nivel de radar.
Para esta ilustración, utilizaremos un dispositivo analógico de medición de nivel con una señal de salida de 4-20 mA. 4 mA representa un nivel de tanque de 0%, 20 mA representa un nivel de tanque de 100%, y cualquier cosa entre 4 y 20 mA representa un nivel de tanque proporcionalmente entre 0% y 100%. Si quisiéramos, simplemente podríamos enviar esta señal de corriente analógica de 4-20 miliamperios a la ubicación de monitoreo remoto por medio de un par de cables de cobre, donde conduciría un medidor de panel de algún tipo, cuya escala se calibró para reflejar la profundidad del agua en el tanque, en cualquier unidad de medida preferido.
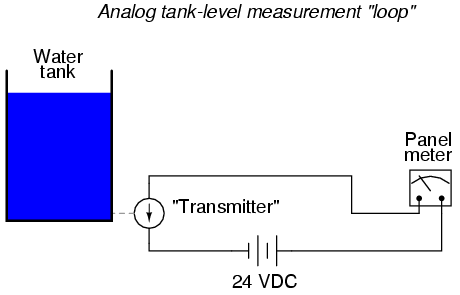
Este sistema de comunicación analógica sería sencillo y robusto. Para muchas aplicaciones, bastaría para nuestras necesidades perfectamente. Pero, no es la única manera de hacer el trabajo. Con el propósito de explorar técnicas digitales, exploraremos otros métodos de monitoreo de este hipotético tanque, aunque el método analógico que acabamos de describir podría ser el más práctico.
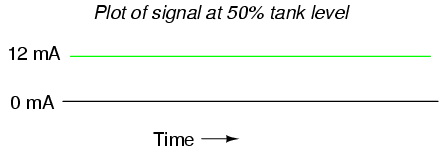
El sistema analógico, por sencillo que sea, sí tiene sus limitaciones. Uno de ellos es el problema de la interferencia de señal analógica. Dado que el nivel de agua del tanque está simbolizado por la magnitud de la corriente CC en el circuito, cualquier “ruido” en esta señal se interpretará como un cambio en el nivel del agua. Sin ruido, una gráfica de la señal de corriente a lo largo del tiempo para un nivel de tanque constante del 50% se vería así:
Si los cables de este circuito están dispuestos demasiado cerca de los cables que transportan una alimentación de CA de 60 Hz, por ejemplo, el acoplamiento inductivo y capacitivo puede crear una señal de “ruido” falsa para ser introducida en este circuito de CC de otro modo. Aunque la baja impedancia de un bucle de 4-20 mA (250 Ω, típicamente) significa que los pequeños voltajes de ruido se cargan significativamente (y por lo tanto se atenúan por la ineficiencia del acoplamiento capacitivo/inductivo formado por los cables de alimentación), dicho ruido puede ser lo suficientemente significativo como para causar problemas de medición:
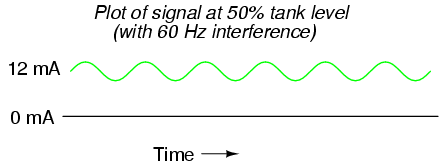
El ejemplo anterior es un poco exagerado, pero el concepto debe ser claro: cualquier ruido eléctrico introducido en un sistema de medición analógico se interpretará como cambios en la cantidad medida. Una forma de combatir este problema es simbolizar el nivel de agua del tanque por medio de una señal digital en lugar de una señal analógica. Podemos hacer esto realmente crudamente reemplazando el dispositivo transmisor analógico con un conjunto de interruptores de nivel de agua montados a diferentes alturas en el tanque:
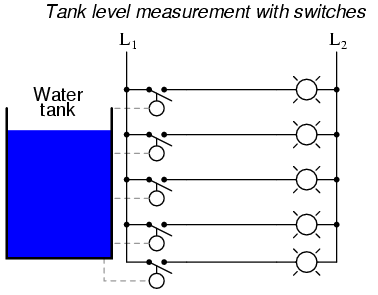
Cada uno de estos interruptores está cableado para cerrar un circuito, enviando corriente a lámparas individuales montadas en un panel en la ubicación de monitoreo. Al cerrarse cada interruptor, su respectiva lámpara se encendería, y quien mirara el panel vería una representación de 5 lámparas del nivel del tanque.
Siendo que cada circuito de lámpara es de naturaleza digital, ya sea 100% encendido o 100% apagado, la interferencia eléctrica de otros cables a lo largo de la carrera tiene mucho menos efecto en la precisión de la medición en el extremo de monitoreo que en el caso de la señal analógica. Se requeriría una gran cantidad de interferencia para hacer que una señal de “apagado” se interpretara como una señal “activada” o viceversa. La resistencia relativa a la interferencia eléctrica es una ventaja que disfrutan todas las formas de comunicación digital sobre la analógica.
Ahora que sabemos que las señales digitales son mucho más resistentes al error inducido por el “ruido”, mejoremos este sistema de medición de nivel de tanque. Por ejemplo, podríamos aumentar la resolución de este sistema de medición de tanques agregando más interruptores, para una determinación más precisa del nivel de agua. Suponga que instalamos 16 interruptores a lo largo de la altura del tanque en lugar de cinco. Esto mejoraría significativamente nuestra resolución de medición, pero a expensas de aumentar en gran medida la cantidad de cables que se necesitan ensartar entre el tanque y la ubicación de monitoreo. Una forma de reducir este gasto de cableado sería usar un codificador de prioridad para tomar los 16 conmutadores y generar un número binario que representara la misma información:
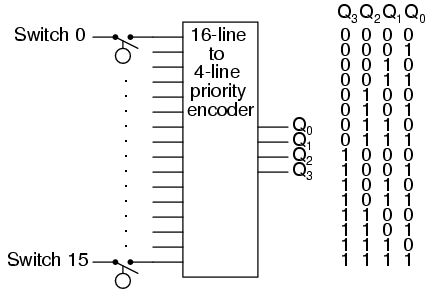
Ahora, solo se necesitan 4 cables (más los cables de tierra y de alimentación necesarios) para comunicar la información, a diferencia de 16 cables (más cualquier cable de tierra y de alimentación). En la ubicación de monitoreo, necesitaríamos algún tipo de dispositivo de visualización que pudiera aceptar los datos binarios de 4 bits y generar una pantalla fácil de leer para que una persona la vea. Un decodificador, cableado para aceptar los datos de 4 bits como su entrada y lámparas de salida de luz de 1 de 16, podría usarse para esta tarea, o podríamos usar un circuito decodificador/controlador de 4 bits para controlar algún tipo de visualización de dígitos numéricos.
Aún así, una resolución de 1/16 de altura del tanque puede no ser lo suficientemente buena para nuestra aplicación. Para resolver mejor el nivel del agua, necesitamos más bits en nuestra salida binaria. Podríamos agregar aún más interruptores, pero esto se vuelve poco práctico con bastante rapidez. Una mejor opción sería volver a conectar nuestro transmisor analógico original al tanque y convertir electrónicamente su salida analógica de 4-20 miliamperios en un número binario con muchos más bits de lo que sería práctico usando un conjunto de interruptores de nivel discretos. Dado que el ruido eléctrico que estamos tratando de evitar se encuentra a lo largo del largo recorrido del cable desde el tanque hasta la ubicación de monitoreo, esta conversión A/D puede tener lugar en el tanque (donde tenemos una señal “limpia” de 4-20 mA). Hay una variedad de métodos para convertir una señal analógica a digital, pero nos saltaremos una discusión en profundidad de esas técnicas y nos concentraremos en la comunicación de señal digital en sí.
El tipo de información digital que se envía desde la instrumentación de nuestro tanque a la instrumentación de monitoreo se conoce como datos digitales paralelos. Es decir, cada bit binario se envía a lo largo de su propio cable dedicado, de modo que todos los bits llegan a su destino simultáneamente. Esto obviamente requiere el uso de al menos un cable por bit para comunicarse con la ubicación de monitoreo. Podríamos reducir aún más nuestras necesidades de cableado enviando los datos binarios a lo largo de un solo canal (un cable + tierra), de modo que cada bit se comunique uno a la vez. Este tipo de información se conoce como datos digitales en serie.
Podríamos usar un multiplexor o un registro de desplazamiento para tomar los datos paralelos del convertidor A/D (en el transmisor del tanque) y convertirlos a datos en serie. En el extremo receptor (la ubicación de monitoreo) podríamos usar un demultiplexor u otro registro de desplazamiento para convertir los datos en serie a paralelos nuevamente para su uso en los circuitos de visualización. Los detalles exactos de cómo se mantienen sincronizados los pares mux/demux o registro de turnos es, como la conversión A/D, un tema para otra lección. Afortunadamente, existen chips IC digitales llamados UArts (Universal Asynchronous Receiver-Transmisores) que manejan todos estos detalles por su cuenta y simplifican mucho la vida del diseñador. Por ahora, debemos seguir enfocando nuestra atención en el asunto que nos ocupa: cómo comunicar la información digital desde el tanque hasta la ubicación de monitoreo.