
1.3: Regresar a las ecuaciones de Maxwell
- Page ID
- 127778

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
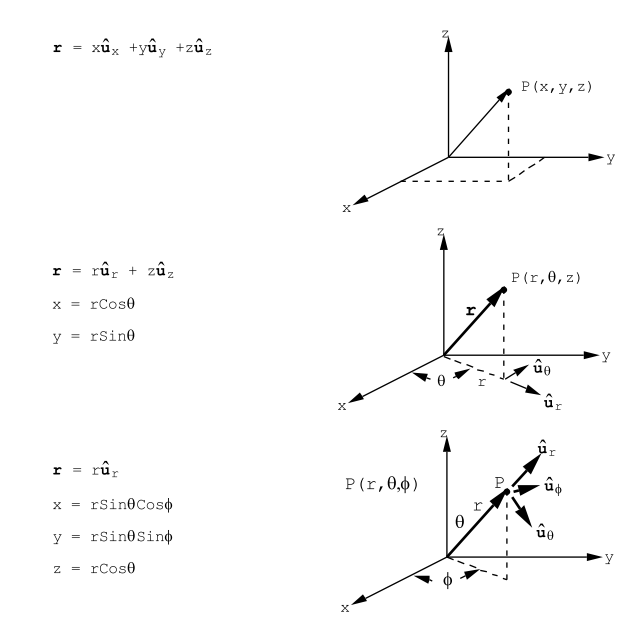
Las ecuaciones de Maxwell (1.2.1, 1.2.2, 1.2.3, 1.2.4) forman un sistema de ecuaciones diferenciales que se pueden resolver para los campos vectoriales\(\vec E\) y\(\vec B\) dada la variación de espacio y tiempo de los cuatro términos fuente ρ f\(\vec {J_{f}}\) (\(\vec r\)\(\vec r\), t),\(\vec P\) (\(\vec r\), t), y \(\vec M\)(\(\vec r\), t). Para resolver las ecuaciones de Maxwell para un problema específico, suele ser conveniente especificar cada campo vectorial en términos de componentes en uno de los tres sistemas de coordenadas principales: (a) coordenadas cartesianas (x, y, z), Figura (1.3.10); (b) coordenadas polares cilíndricas (r, θ, z), Figura (1.3.10); y (c) coordenadas polares esféricas (ρ, θ, φ), Figura (1.3.10).
También es necesario poder calcular el campo escalar generado por la divergencia de un campo vectorial en cada uno de los tres sistemas de coordenadas anteriores. Además, se deben poder calcular los tres componentes del rizo en los tres sistemas de coordenadas anteriores. Los derivados de vectores son revisados por M.R. Spiegel, Mathematical Handbook of Formulas and Table s, Schaum's Outline Series, McGraw-Hill, Nueva York, 1968, capítulo 22. También merece la pena leer la discusión contenida en The Feynman Lectures on Physics, de R.P. Feynman, R.B. Leighton, y M. Sands, Addison-Wesley, Reading, Mass., 1964, Tomo II, capítulos 2 y 3.
Los siguientes cuatro teoremas vectoriales deben ser leídos, entendidos y comprometidos con la memoria porque serán utilizados una y otra vez en el curso de la resolución de las ecuaciones de Maxwell.
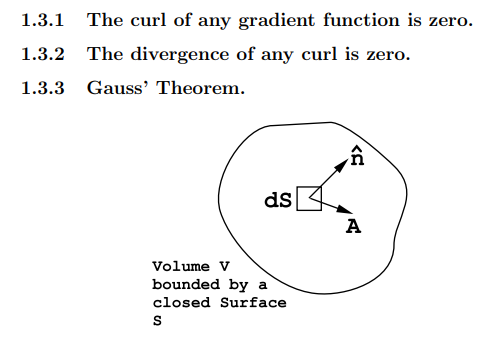
Considera un volumen V delimitado por una superficie cerrada S, ver Figura (1.3.11). Un elemento de área en la superficie S puede ser especificado por el vector d\(\vec S\) =\(\hat{n}\) dS donde dS es la magnitud del elemento de área y \(\hat{n}\)es un vector unitario dirigido a lo largo de la normal hacia afuera a la superficie en el elemento dS. Sea\(\vec A\) (\(\vec r\), t) un campo vectorial que en general puede depender de la posición y del tiempo. Entonces el teorema de Gauss afirma que
\[ \int \int_{S}(\vec{\mathrm{A}} \cdot \hat{\mathbf{n}}) d S=\int \int \int_{V} \operatorname{div}(\vec{\mathrm{A}}) d \tau \nonumber\]
donde d\(\tau\) es un elemento de volumen. Las integraciones deben llevarse a cabo en un tiempo fijo.
1.3.4 Teorema de Stokes.
Considera una superficie S delimitada por una curva cerrada C, ver Figura (1.3.12). \(\vec A\)(\(\vec r\), t) es cualquier campo vectorial que puede depender en general de la posición y del tiempo. En
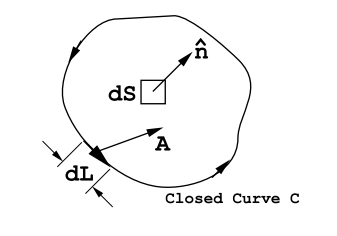
un tiempo fijo calcular la línea integral de\(\vec A\) alrededor de la curva C; el elemento de longitud a lo largo de la línea C es\(d\overrightarrow{\mathrm{L}}\). Entonces el teorema de Stokes afirma que
\[\int_{C} \overrightarrow{\mathrm{A}} \cdot \overrightarrow{d \mathbf{L}}=\iint_{S} \operatorname{curl}(\overrightarrow{\mathrm{A}}) \cdot \hat{\mathbf{n}} d S \nonumber \]
donde \(\hat{n}\)es un vector unitario normal al elemento de superficie dS cuya dirección está relacionada con la dirección de recorrido alrededor de la curva C por la regla de la derecha.