8.4: Partículas cargadas en un campo eléctrico y uno magnético
- Page ID
- 131889

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
La fuerza sobre una partícula cargada en un campo eléctrico y un campo magnético es
\[\textbf{F} = q(\textbf{E} +\textbf{v} \times \textbf{B})\].
Como ejemplo, investiguemos el movimiento de una partícula cargada en campos eléctricos y magnéticos uniformes que están en ángulo recto entre sí. Específicamente, escojamos ejes para que el campo magnético\(\textbf{B}\) se dirija a lo largo del\(z\) eje positivo y el campo eléctrico se dirija a lo largo del\(y\) eje positivo. (¡Dibuja esto en un diagrama grande!) Intenta imaginar cómo sería la moción. Supongamos, por ejemplo, que el movimiento está todo en el\(yz\) plano -. Quizás la partícula se moverá redonda y redonda en círculo alrededor de un eje paralelo al campo magnético, pero el centro de este círculo acelerará en la dirección del campo eléctrico. Bueno, tienes razón en que la partícula sí se mueve en círculo alrededor de un eje paralelo a\(\textbf{B}\), y también que el centro del círculo efectivamente se mueve. Pero el resto no está del todo bien. Antes de embarcarse en un análisis matemático, vea si puede imaginar el movimiento con un poco más de precisión.
Supondremos que en algún instante los\(x\),\(y\) y\(z\) los componentes de la velocidad de la partícula son\(u\),\(v\) y\(w\). Supondremos que estos componentes de velocidad son todos no relativistas, lo que significa que m es constante y no una función de la velocidad. Los tres componentes de la ecuación de movimiento (ecuación 8.4.1) son entonces
\[m\dot u = qBv,\]
\[m \dot v = -qBu + qE\]
y\[m \dot w = 0.\]
Para abreviar, escribiré\(q \ B/m = \omega\) (la velocidad angular del ciclotrón) y, señalando que las dimensiones de\(E/B\) son las dimensiones de la velocidad (¡verifica esto!) , escribiré\(E/B = V_D\), donde la significación del subíndice se\(D\) hará evidente en su momento. Las ecuaciones del movimiento se convierten entonces
\[\ddot x = \dot u = \omega v,\]
\[\ddot y = \dot v = -\omega (u-V_D)\]
y\[\ddot z = \dot w =0.\]
Para encontrar las soluciones generales a estos, podemos, por ejemplo, dejar\(X = u − V_D\). Entonces las ecuaciones 8.4.5 y 8.4.6 se convierten\(\dot X =\omega v\) y\(\dot v =-\omega X\). De estos, obtenemos\(\ddot X = -\omega^2 X\). La solución general de esto es\(X = A \sin (\omega t + \alpha)\), y así\(u=A \sin (\omega t + \alpha)+V_D\). Por integración y diferenciación con respecto al tiempo podemos encontrar\( x\) y\(\ddot x\) respectivamente. Así obtenemos:
\[x = -\frac{A}{\omega} \cos (\omega t +\alpha) +V_Dt + D,\]
\[u= \dot x = A \sin (\omega t +\alpha) + V_D\]
y\[\ddot x = A \omega \cos (\omega t +\alpha).\]
Del mismo modo podemos resolver para y y z de la siguiente manera:
\[y=\frac{A}{\omega}\sin (\omega t + \alpha) + F,\]
\[v = \dot y = A\cos (\omega t + \alpha),\]
\[\ddot y = -A\omega \sin (\omega t +\alpha),\]
\[z=w_0t+ z_0,\]
\[w=\dot z = w_0\]
y\[\ddot z=0.\]
Existen seis constantes arbitrarias de integración, a saber\(A\),\(D\),\(F\)\(\alpha\),\(z_0\) y\(w_0\), cuyos valores dependen de las condiciones iniciales (posición y velocidad at\(t = 0\)). De estos,\(z_0\) y\(w_0\) son solo los valores iniciales de\(z\) y\(w\). Supongamos que estos son ambos cero y que todo el movimiento tiene lugar en el\(xy\) plano -plano.
En estas ecuaciones\(A\) y\(\alpha\) siempre ocurren en las combinaciones\(A \sin \alpha\) y\(A \cos \alpha\), y por lo tanto por conveniencia voy a dejar\(A \sin \alpha = S\) y\(A \cos \alpha = C\), y voy a reescribir las ecuaciones 8.4.8, 8.4.9, 8.4.11 y 8.4.12 como
\[x=-\frac{1}{\omega} (C \cos \omega t - S \sin \omega t) + V_Dt+D,\]
\[u=C\sin \omega t +S\cos \omega t + V_D,\]
\[y=\frac{1}{\omega}(C\sin \omega t + S \cos \omega t) + F,\]
y\[v= C \cos \omega t - S \sin \omega t.\]
Supongamos que las condiciones iniciales son: a\(t = 0\),\(x = y = u = v = 0\). Es decir, la partícula parte del reposo en el origen. Si se ponen estas condiciones iniciales en las ecuaciones 8.4.17-20, nos encontramos con eso\(C = 0\),\(S = −V_D\),\(D = 0\) y\(F = V_D/\omega\). Las ecuaciones 8.4.17 y 8.4.19, que dan la ecuación a la trayectoria descrita por la partícula, se convierten en
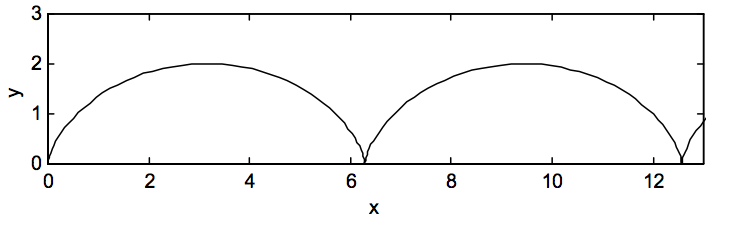
\[x=-\frac{V_D}{\omega} \sin \omega t + V_D t\]
y\[y=\frac{V_D}{\omega}(1-\cos \omega t).\]
Vale la pena recordarnos aquí que la velocidad angular del ciclotrón es\(\omega = qB/m\) y eso\(V_D = E/B\), y por lo tanto\(\frac{V_D}{\omega}=\frac{mE}{qB^2}\). Estas ecuaciones son las ecuaciones paramétricas de un cicloide. (Para más información sobre el cicloide, consulte el Capítulo 19 de las notas de Mecánica Clásica de esta serie.) El movimiento es un movimiento circular en el que el centro del círculo deriva (de ahí el subíndice\(D\)) en la\(x\) dirección -a la velocidad\(V_D\). El camino se muestra en la Figura\(\text{VIII.2}\), dibujado para distancias en unidades de\(\frac{V_D}{\omega}=\frac{mE}{qB^2}\).
\(\text{FIGURE VII.2}\)
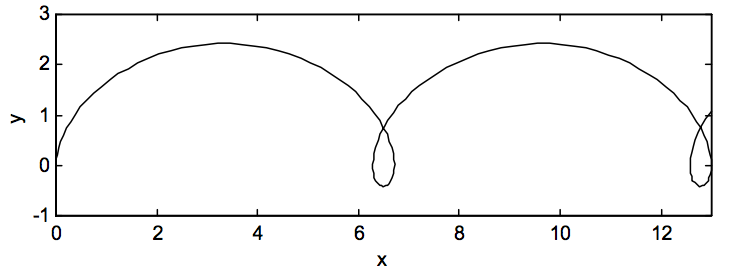
Dejo al lector probar diferentes condiciones iniciales, como una de\(u\) o\(v\) no inicialmente cero. Puedes probar con\(u_0\) o\(v_0\) igual a algún múltiplo de fracción de\(V_D\), y puedes hacer el\(u_0\) o\(v_0\) positivo o negativo. Calcular los valores de las constantes\(D\)\(F\),,\(C\)\(S\) y dibujar la ruta resultante. Siempre obtendrás algún tipo de cicloide. Puede que no sea un simple cicloide como en nuestro ejemplo, pero podría ser un cicloide expandido (es decir, pequeños bucles en lugar de cúspides) o un cicloide contraído, que no tiene bucles ni cúspides, sino que parece más o menos sinusoidal. Voy a probar sólo uno. Voy a dejar\(u_0 = 0\) y\(v_0 = +V_D\). Si hago eso, me sale
\[x=\frac{V_D}{\omega}(1-\cos \omega t - \sin \omega t)+V_Dt\]
y\[y=\frac{V_D}{\omega}(1-\cos \omega t + \sin \omega t).\]
Esto se ve así:
\(\text{FIGURE VII.3}\)