
2.1: Fundamentos de la Cinemática
- Page ID
- 127964

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Definición de Cinemática
La cinemática es el estudio del movimiento de puntos, objetos y grupos de objetos sin considerar las causas de su movimiento.
objetivos de aprendizaje
- Definir cinemática
La cinemática es la rama de la mecánica clásica que describe el movimiento de puntos, objetos y sistemas de grupos de objetos, sin referencia a las causas del movimiento (es decir, las fuerzas). El estudio de la cinemática a menudo se conoce como la “geometría del movimiento”.
Los objetos están en movimiento a nuestro alrededor. Todo, desde un partido de tenis hasta un sobrevuelo de sonda espacial del planeta Neptuno implica movimiento. Cuando estás descansando, tu corazón mueve la sangre por tus venas. Incluso en objetos inanimados hay movimiento continuo en las vibraciones de átomos y moléculas. Pueden surgir preguntas interesantes sobre el movimiento: ¿cuánto tiempo tardará una sonda espacial en viajar a Marte? ¿Dónde aterrizará un balompié si se lanza en cierto ángulo? La comprensión del movimiento, sin embargo, también es clave para comprender otros conceptos en física. Una comprensión de la aceleración, por ejemplo, es crucial para el estudio de la fuerza.
Para describir el movimiento, la cinemática estudia las trayectorias de puntos, líneas y otros objetos geométricos, así como sus propiedades diferenciales (como velocidad y aceleración). La cinemática se utiliza en astrofísica para describir el movimiento de cuerpos y sistemas celestes; y en ingeniería mecánica, robótica y biomecánica para describir el movimiento de sistemas compuestos por partes unidas (como un motor, un brazo robótico o el esqueleto del cuerpo humano).
Un estudio formal de la física comienza con la cinemática. La palabra “cinemática” proviene de una palabra griega “kinesis” que significa movimiento, y está relacionada con otras palabras inglesas como “cine” (películas) y “kinesiología” (el estudio del movimiento humano). El análisis cinemático es el proceso de medición de las cantidades cinemáticas utilizadas para describir el movimiento. El estudio de la cinemática se puede abstraer en expresiones puramente matemáticas, las cuales pueden ser utilizadas para calcular diversos aspectos del movimiento como la velocidad, la aceleración, el desplazamiento, el tiempo y la trayectoria.

Cinemática de una trayectoria de partículas: Las ecuaciones cinemáticas se pueden utilizar para calcular la trayectoria de partículas u objetos. Las cantidades físicas relevantes para el movimiento de una partícula incluyen: masa m, posición r, velocidad v, aceleración a.
Marcos de Referencia y Desplazamiento
Para describir el movimiento de un objeto, es necesario especificar su posición en relación con un marco de referencia conveniente.
objetivos de aprendizaje
- Evaluar el desplazamiento dentro de un marco de referencia.
Para describir el movimiento de un objeto, primero se debe describir su posición —donde se encuentra en un momento determinado. Más precisamente, debe especificar su posición en relación con un marco de referencia conveniente. La Tierra se utiliza a menudo como marco de referencia, y a menudo describimos la posición de los objetos relacionados con su posición hacia o desde la Tierra. Matemáticamente, la posición de un objeto generalmente está representada por la variable x.
Marcos de Referencia
Hay dos opciones que tienes que hacer para definir una variable de posición x. Hay que decidir dónde poner x = 0 y qué dirección será positiva. Esto se conoce como elegir un sistema de coordenadas o elegir un marco de referencia. Siempre y cuando seas consistente, cualquier marco es igualmente válido. Pero no se quiere cambiar los sistemas de coordenadas en medio de un cálculo. Imagínate sentado en un tren en una estación cuando de repente notas que la estación se mueve hacia atrás. La mayoría de la gente diría que simplemente no se dieron cuenta de que el tren se estaba moviendo —solo parecía que la estación se estaba moviendo. Pero esto demuestra que hay una tercera opción arbitraria que consiste en elegir un sistema de coordenadas: los marcos de referencia válidos pueden diferir entre sí al moverse unos con respecto a otros. Puede parecer extraño usar un sistema de coordenadas que se mueva con relación a la tierra, pero, por ejemplo, el marco de referencia que se mueve junto con un tren podría ser mucho más conveniente para describir las cosas que suceden dentro del tren. Los marcos de referencia son particularmente importantes a la hora de describir el desplazamiento de un objeto.
MARCOS DE REFERENCIA por el Profesor Hume y el Profesor Donald Ivey de la Universidad de Toronto
En esta película clásica, los profesores Hume e Ivey ilustran inteligentemente marcos de referencia y distinguen entre marcos de referencia fijos y móviles.
Marcos de referencia (1960) Película educativa: Marcos de referencia es una película educativa de 1960 del Comité de Estudios de Ciencias Físicas. El filme se realizó para ser exhibido en los cursos de física de secundaria. En la película Los profesores de física de la Universidad de Toronto Patterson Hume y Donald Ivey explican la distinción entre marcos de referencia inerciales y no interciales, al tiempo que demuestran estos conceptos a través de trucos de cámara humorísticos. Por ejemplo, la película se abre con el Dr. Hume, quien parece estar boca abajo, acusando al Dr. Ivey de estar boca abajo. Sólo cuando el par voltea una moneda se hace evidente que el Dr. Ivey —y la cámara— están realmente invertidos. El humor de la película sirve tanto para mantener el interés de los estudiantes como para demostrar los conceptos que se discuten. Esta película PSSC utiliza un conjunto fascinante que consiste en una mesa giratoria y muebles que ocupan lugares sorprendentemente impredecibles dentro del área de visualización. La fina cinematografía de Abraham Morochnik, y la divertida narración de los profesores de la Universidad de Toronto Donald Ivey y Patterson Hume es un maravilloso ejemplo de la diversión que puede tener un equipo creativo de cineastas con un tema que otros tipos menos imaginativos podrían encontrar peatonal. Productor: Richard Leacock Compañía Productora: Educational Development Corp. Patrocinador: Eric Prestamon
Desplazamiento
El desplazamiento es el cambio de posición de un objeto en relación con su marco de referencia. Por ejemplo, si un automóvil se mueve de una casa a una tienda de comestibles, su desplazamiento es la distancia relativa de la tienda de comestibles al marco de referencia, o la casa. La palabra “desplazamiento” implica que un objeto se ha movido o ha sido desplazado. El desplazamiento es el cambio de posición de un objeto y se puede representar matemáticamente de la siguiente manera:
\[\mathrm{Δx=x_f−x_0}\]
donde\(\Delta x\) es el desplazamiento,\(x_f\) es la posición final, y\(x_0\) es la posición inicial.
muestra la importancia de utilizar un marco de referencia al describir el desplazamiento de un pasajero en un avión.
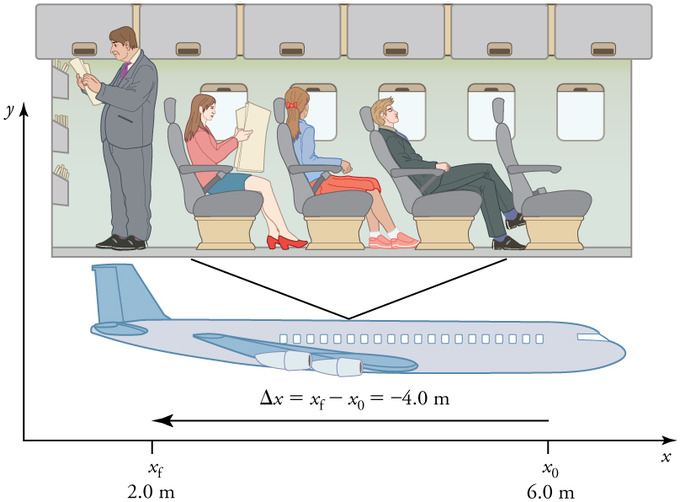
Desplazamiento en Términos de Referencia: Un pasajero se mueve de su asiento a la parte trasera del avión. Su ubicación relativa al avión viene dada por x. El desplazamiento de -4.0m del pasajero con respecto al avión está representado por una flecha hacia la parte trasera del avión. Observe que la flecha que representa su desplazamiento es el doble de larga que la flecha que representa el desplazamiento del profesor (se mueve el doble de distancia).
Introducción a Escalares y Vectores
Un vector es cualquier cantidad que tenga tanto magnitud como dirección, mientras que un escalar solo tiene magnitud.
objetivos de aprendizaje
- Distinguir la diferencia entre escalares y vectores
¿Cuál es la diferencia entre distancia y desplazamiento? Mientras que el desplazamiento se define tanto por la dirección como por la magnitud, la distancia se define solo por la magnitud. El desplazamiento es un ejemplo de una cantidad vectorial. La distancia es un ejemplo de una cantidad escalar. Un vector es cualquier cantidad con magnitud y dirección. Otros ejemplos de vectores incluyen una velocidad de 90 km/h al este y una fuerza de 500 newtons en línea recta hacia abajo.
Escalares y Vectores: El señor Andersen explica las diferencias entre cantidades escalar y vectores. También utiliza una demostración para mostrar la importancia de los vectores y la adición de vectores.
En matemáticas, física e ingeniería, un vector es un objeto geométrico que tiene una magnitud (o longitud) y dirección y se puede agregar a otros vectores de acuerdo con el álgebra vectorial. La dirección de un vector en movimiento unidimensional viene dada simplemente por un signo más (+) o menos (−). Un vector se representa frecuentemente por un segmento de línea con una dirección definida, o gráficamente como una flecha, conectando un punto inicial A con un punto terminal B, como se muestra en.

Representación vectorial: Un vector se representa frecuentemente por un segmento de línea con una dirección definida, o gráficamente como una flecha, conectando un punto inicial A con un punto terminal B.
Algunas cantidades físicas, como la distancia, o bien no tienen dirección o ninguna dirección especificada. En física, un escalar es una cantidad física simple que no se cambia por rotaciones o traslaciones del sistema de coordenadas. Se trata de cualquier cantidad que se pueda expresar por un solo número y que tenga una magnitud, pero ninguna dirección. Por ejemplo, una temperatura de 20ºC, las 250 kilocalorías (250 Calorías) de energía en una barra de caramelo, un límite de velocidad de 90 km/h, la altura de 1.8 m de una persona y una distancia de 2.0 m son todos escalares, o cantidades sin dirección especificada. Tenga en cuenta, sin embargo, que un escalar puede ser negativo, como una temperatura de −20ºC. En este caso, el signo menos indica un punto en una escala en lugar de una dirección. Los escalares nunca son representados por flechas. (Se muestra una comparación de escalares frente a vectores en.)
Escalares vs. vectores: Una breve lista de cantidades que son escalares o vectores.
Puntos Clave
- Para describir el movimiento, la cinemática estudia las trayectorias de puntos, líneas y otros objetos geométricos.
- El estudio de la cinemática puede ser abstraído en expresiones puramente matemáticas.
- Las ecuaciones cinemáticas se pueden utilizar para calcular diversos aspectos del movimiento, como la velocidad, la aceleración, el desplazamiento y el tiempo.
- Elegir un marco de referencia requiere decidir dónde está la posición inicial del objeto y qué dirección se considerará positiva.
- Los marcos de referencia válidos pueden diferir entre sí al moverse uno con respecto al otro.
- Los marcos de referencia son particularmente importantes a la hora de describir el desplazamiento de un objeto.
- El desplazamiento es el cambio de posición de un objeto en relación con su marco de referencia.
- Un vector es cualquier cantidad que tenga magnitud y dirección.
- Un escalar es cualquier cantidad que tenga magnitud pero no dirección.
- El desplazamiento y la velocidad son vectores, mientras que la distancia y la velocidad son escalares.
Términos Clave
- cinemática: La rama de la mecánica que se ocupa de los objetos en movimiento, pero no de las fuerzas involucradas.
- desplazamiento: Una cantidad vectorial que denota la distancia con un componente direccional.
- marco de referencia: Un sistema de coordenadas o conjunto de ejes dentro del cual medir la posición, orientación y otras propiedades de los objetos en él.
- escalar: Una cantidad que tiene magnitud pero no dirección; comparar vector.
- vector: Una cantidad dirigida, una con magnitud y dirección; la entre dos puntos.
LICENCIAS Y ATRIBUCIONES
CONTENIDO CON LICENCIA CC, COMPARTIDO PREVIAMENTE
- Curación y Revisión. Proporcionado por: Boundless.com. Licencia: CC BY-SA: Atribución-CompartirIgual
CC CONTENIDO LICENCIADO, ATRIBUCIÓN ESPECÍFICA
- Colegio OpenStax, Colegio de Física. 17 de septiembre de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42122/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución
- Cinemática. Proporcionado por: Wikipedia. Ubicado en: es.wikipedia.org/wiki/Kinematics. Licencia: CC BY-SA: Atribución-CompartirIgual
- cinemática. Proporcionado por: Wikcionario. Ubicado en: es.wiktionary.org/wiki/cinemática. Licencia: CC BY-SA: Atribución-CompartirIgual
- Cinemática. Proporcionado por: Wikipedia. Ubicado en: es.wikipedia.org/wiki/Kinematics. Licencia: CC BY: Atribución
- Proporcionado por: Luz y Materia. Ubicado en: http://lightandmatter.com/lmb.pdf. Licencia: CC BY: Atribución
- Colegio OpenStax, Colegio de Física. 17 de septiembre de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42033/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución
- Proporcionado por: Luz y Materia. Ubicado en: http://lightandmatter.com/lmb.pdf. Licencia: CC BY: Atribución
- desplazamiento. Proporcionado por: Wikcionario. Ubicado en: es.wiktionary.org/wiki/displacement. Licencia: CC BY-SA: Atribución-CompartirIgual
- marco de referencia. Proporcionado por: Wikcionario. Ubicado en: es.wiktionary.org/wiki/frame_of_reference. Licencia: CC BY-SA: Atribución-CompartirIgual
- Cinemática. Proporcionado por: Wikipedia. Ubicado en: es.wikipedia.org/wiki/Kinematics. Licencia: CC BY: Atribución
- Colegio OpenStax, Colegio de Física. 25 de octubre de 2012. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42033/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución
- Marcos de Referencia (1960) Cine Educativo. Ubicado en: http://www.youtube.com/watch?v=aRDOqiqBUQY. Licencia: Dominio Público: Sin Derechos de Autor Conocidos. Términos de la licencia: Licencia estándar de YouTube
- Escalar (física). Proporcionado por: Wikipedia. Ubicado en: es.wikipedia.org/wiki/Scalar_ (física). Licencia: CC BY-SA: Atribución-CompartirIgual
- Colegio OpenStax, Colegio de Física. 17 de septiembre de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42124/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución
- Vector (física). Proporcionado por: Wikipedia. Ubicado en: es.wikipedia.org/wiki/Vector_ (física). Licencia: CC BY-SA: Atribución-CompartirIgual
- escalar. Proporcionado por: Wikcionario. Ubicado en: es.wiktionary.org/wiki/scalar. Licencia: CC BY-SA: Atribución-CompartirIgual
- vector. Proporcionado por: Wikcionario. Ubicado en: http://en.wiktionary.org/wiki/vector. Licencia: CC BY-SA: Atribución-CompartirIgual
- Cinemática. Proporcionado por: Wikipedia. Ubicado en: es.wikipedia.org/wiki/Kinematics. Licencia: CC BY: Atribución
- Colegio OpenStax, Colegio de Física. 25 de octubre de 2012. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42033/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución
- Marcos de Referencia (1960) Cine Educativo. Ubicado en: http://www.youtube.com/watch?v=aRDOqiqBUQY. Licencia: Dominio Público: Sin Derechos de Autor Conocidos. Términos de la licencia: Licencia estándar de YouTube
- Vector (física). Proporcionado por: Wikipedia. Ubicado en: es.wikipedia.org/wiki/Vector_ (física). Licencia: CC BY: Atribución
- Escalares y Vectores. Proporcionado por: Asociación Nacional del Aire y el Espacio. Ubicado en: http://www.grc.nasa.gov/WWW/k-12/airplane/vectors.html. Licencia: Dominio Público: No Conocido Derechos de Autor
- Escalares y Vectores. Ubicado en: http://www.youtube.com/watch?v=EUrMI0DIh40. Licencia: Dominio Público: Sin Derechos de Autor Conocidos. Términos de la licencia: Licencia estándar de YouTube