
9.8: Resolución de problemas
- Page ID
- 128501
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
objetivos de aprendizaje
- Desarrollar y aplicar una estrategia sólida de resolución de problemas para la cinemática rotacional
Estrategia de resolución de problemas para cinemática rotacional
Al resolver problemas en cinemática rotacional:
- Examinar la situación para determinar que está involucrada la cinemática rotacional (movimiento rotacional). La rotación debe estar involucrada, pero sin la necesidad de considerar fuerzas o masas que afecten el movimiento.
- Identificar exactamente lo que hay que determinar en el problema (identificar las incógnitas). Un boceto de la situación es útil.
- Hacer una lista de lo que se da o se puede inferir del problema como se indica (identificar los conocimientos).
- Resolver la ecuación o ecuaciones apropiadas para la cantidad a determinar (la desconocida). Puede ser útil pensar en términos de un análogo traslacional porque a estas alturas ya estás familiarizado con tal movimiento.
- Sustituir los valores conocidos junto con sus unidades en la ecuación apropiada, y obtener soluciones numéricas completas con unidades. Asegúrese de usar unidades de radianes para los ángulos.
- Revisa tu respuesta para ver si es razonable: ¿Tiene sentido tu respuesta?
Ejemplo\(\PageIndex{1}\):
Supongamos que un tren de carga grande acelera desde el reposo, dando a sus ruedas de 0.350 m de radio una aceleración angular de 0.250 rad/s 2. Después de que las ruedas hayan hecho 200 revoluciones (supongamos que no hay deslizamiento): (a) ¿Hasta dónde se ha movido el tren por la vía? b) ¿Cuál es la velocidad angular final de las ruedas y la velocidad lineal del tren?
En la parte (a), se nos pide encontrar x, y en (b) se nos pide encontrar ω y v. Se nos da el número de revoluciones θ, el radio de las ruedas r, y la aceleración angular α.
La distancia x se encuentra muy fácilmente a partir de la relación entre distancia y ángulo de rotación:\(\mathrm{θ=\frac{x}{r}}\).
Resolviendo esta ecuación para x rendimientos\(\mathrm{x=rθ}\).
Antes de usar esta ecuación, debemos convertir el número de revoluciones en radianes, porque estamos ante una relación entre cantidades lineales y rotacionales:
\[\mathrm{θ=(200 rev)(\dfrac{2π \; rad}{1 \; rev})=1257 \; rad.}\]
Sustituya los valores conocidos\(\mathrm{x=rθ}\) para encontrar la distancia que el tren se movió por la vía:
\[\mathrm{x=rθ=(0.350 \;m)(1257 \; rad)=440 \; m.}\]
No podemos usar ninguna ecuación que incorpore t para encontrar ω, porque la ecuación tendría al menos dos valores desconocidos. La ecuación\(\mathrm{ω^2=ω_0^2+2 \alpha \theta}\) funcionará, porque conocemos los valores para todas las variables excepto ω. Tomando la raíz cuadrada de esta ecuación e ingresando los valores conocidos da
\[\begin{align} \mathrm{ω} & \mathrm{=\sqrt{0+2(0.250 \; rad/s^2)(1257 \; rad)}} \\ & \mathrm{=25.1 \; rad/s} \end{align}\]
Se puede encontrar la velocidad lineal del tren, v, a través de su relación con ω:
\[\mathrm{v=rω=(0.350 \; m)(25.1 \; rad/s)=8.77 \; m/s}\]
Movimiento rotacional: Parte de una serie de videos sobre resolución de problemas físicos. Los problemas son tomados de “La alegría de la física” Este trata del movimiento angular. Se exhorta al espectador a pausar el video en la declaración del problema y trabajar el problema antes de ver el resto del video.
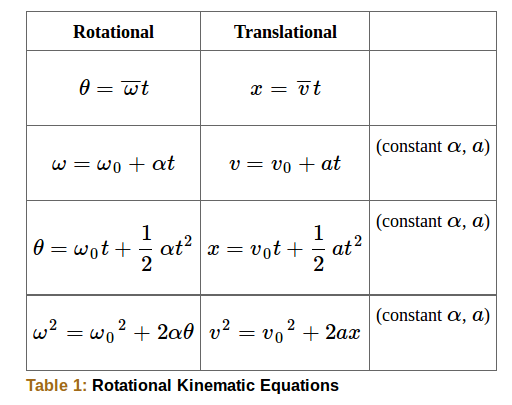
Listado de ecuaciones: Ecuaciones cinemáticas rotacionales y traslacionales.
Puntos Clave
- Examinar la situación para determinar que la cinemática rotacional (movimiento rotacional) está involucrada, e identificar exactamente lo que hay que determinar.
- Hacer una lista de lo que se da o se puede inferir del problema como se indica y resolver las ecuaciones correspondientes.
- Sustituir los valores conocidos junto con sus unidades en la ecuación apropiada, y obtener soluciones numéricas completas con unidades.
Términos Clave
- cinemática: La rama de la mecánica que se ocupa de los objetos en movimiento, pero no de las fuerzas involucradas.
LICENCIAS Y ATRIBUCIONES
CONTENIDO CON LICENCIA CC, COMPARTIDO PREVIAMENTE
- Curación y Revisión. Proporcionado por: Boundless.com. Licencia: CC BY-SA: Atribución-CompartirIgual
CC CONTENIDO LICENCIADO, ATRIBUCIÓN ESPECÍFICA
- OpenStax College, Cinemática del Movimiento Rotacional. 17 de septiembre de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42178/latest/. Licencia: CC BY: Atribución
- cinemática. Proporcionado por: Wikcionario. Ubicado en: es.wiktionary.org/wiki/cinemática. Licencia: CC BY-SA: Atribución-CompartirIgual
- Movimiento rotacional. Ubicado en: http://www.youtube.com/watch?v=FZ8U_3qZQqs. Licencia: Dominio Público: Sin Derechos de Autor Conocidos. Términos de licencia: Licencia estándar de YouTube
- OpenStax College, Cinemática del Movimiento Rotacional. 8 de febrero de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42178/latest/. Licencia: CC BY: Atribución