
21A: Vectores - El Producto Cruzado y Torque



- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
No use su mano izquierda cuando aplique ya sea la regla de la mano derecha para el producto cruzado de dos vectores (discutida en este capítulo) o la regla de la derecha para “algo rizado algo recto” discutida en el capítulo anterior.
Existe un operador relacional para vectores que nos permite eludir el cálculo del brazo de momento. El operador relacional se llama producto cruzado. Se representa por el símbolo “×” leer “cruz”. El par→τ puede expresarse como el producto cruzado del vector de posición→r para el punto de aplicación de la fuerza, y el vector de fuerza→F en sí mismo:
→τ=→r×→F
Antes de comenzar nuestra discusión matemática de lo que queremos decir con el producto cruzado, algunas palabras sobre el vector→r están en orden. Es importante que puedas distinguir entre el vector de posición→r para la fuerza, y el brazo de momento, por lo que los presentamos a continuación en un mismo diagrama. Usamos el mismo ejemplo que hemos usado antes:
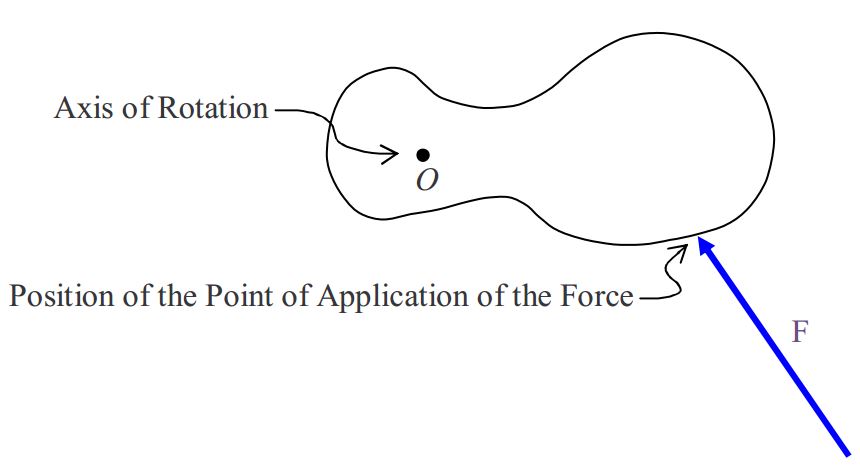
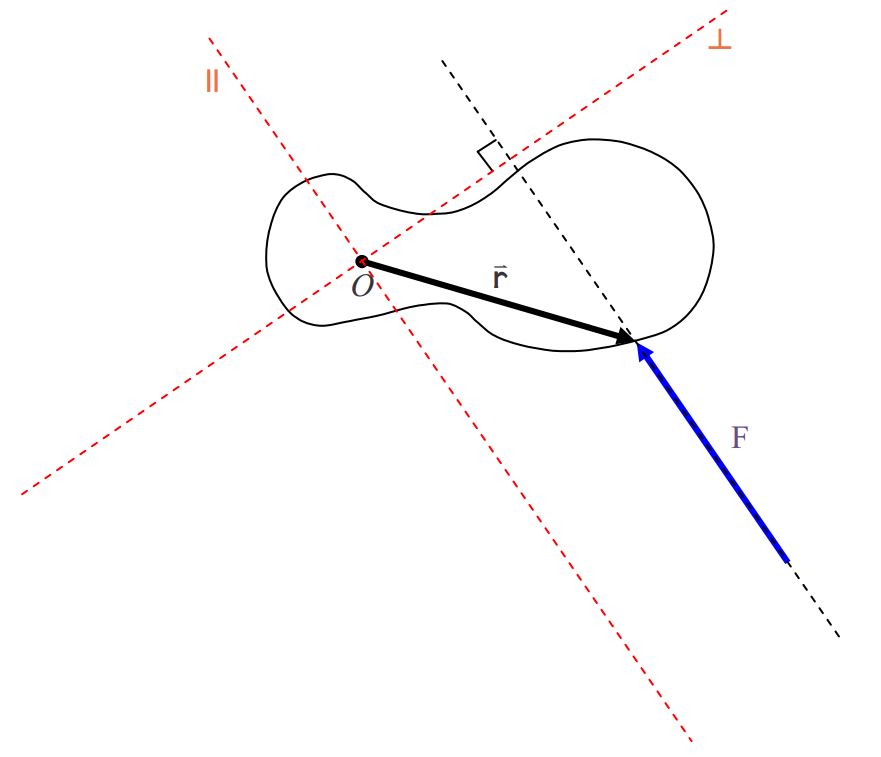
en el que estamos mirando directamente a lo largo del eje de rotación (por lo que parece un punto) y la fuerza se encuentra en un plano perpendicular a ese eje de rotación. Utilizamos la convención diagramática de que, el punto en el que se aplica la fuerza al cuerpo rígido es el punto en el que un extremo de la flecha en el diagrama toca el cuerpo rígido. Ahora agregamos la línea de acción de la fuerza y el brazo de momentor⊥ al diagrama, así como el vector→r de posición del punto de aplicación de la fuerza.

El brazo de momento en realidad se puede definir en términos del vector de posición para el punto de aplicación de la fuerza. Considera un sistema dey coordenadas inclinadasx, que tenga un origen en el eje de rotación, con un eje paralelo a la línea de acción de la fuerza y un eje perpendicular a la línea de acción de la fuerza. Etiquetamos elx eje⊥ para “perpendicular” y ely eje‖ para “paralelo”.
Ahora dividimos el vector de posición→r en sus vectores componentes a lo largo de los‖ ejes⊥ y.
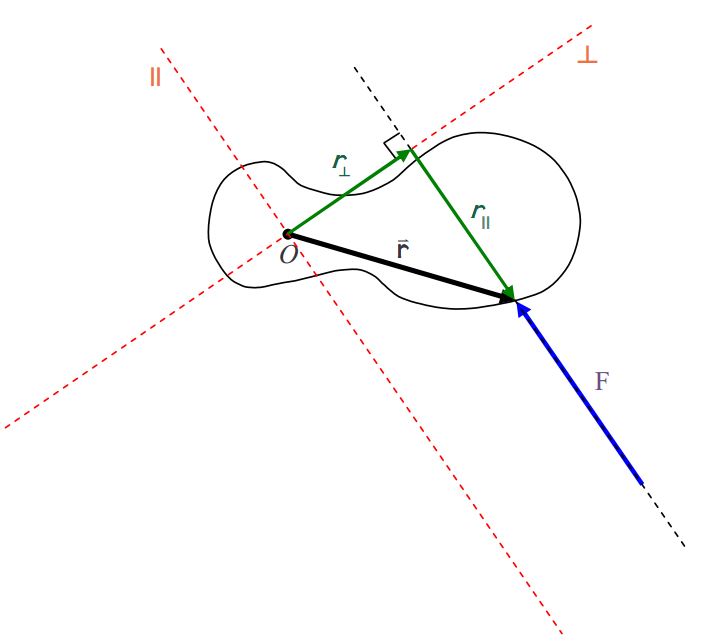
Del diagrama queda claro que el brazo de momentor⊥ es solo la magnitud del vector componente, en la dirección perpendicular a la fuerza, del vector de posición del punto de aplicación de la fuerza.
Ahora vamos a discutir el producto cruzado en términos generales. Considera dos vectores,→A y (\ vec {B}\) que no son ni paralelos ni antiparalelos entre sí. Dos de esos vectores definen un plano. Que ese plano sea el plano de la página y definaθ que sea el más pequeño de los dos ángulos entre los dos vectores cuando los vectores se dibujan cola a cola.
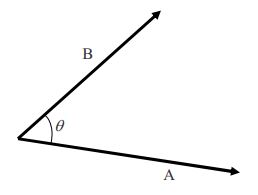
|→A×→B|=ABsinθ
Manteniendo los dedos alineados con el antebrazo, apunte los dedos en la dirección del primer vector (el que aparece antes del “×” en la expresión matemática para el producto cruzado; por ejemplo, el→A invecA×→B).
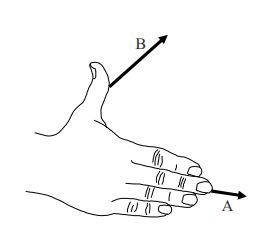
Ahora gira tu mano, según sea necesario, alrededor de un eje imaginario que se extiende a lo largo de tu antebrazo y a lo largo de tu dedo medio, hasta que tu mano esté orientada de tal manera que, si cerraras los dedos, apuntarían en la dirección del segundo vector.
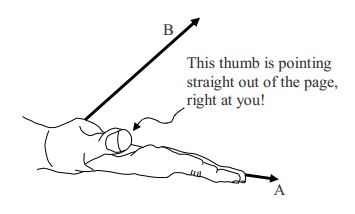
Su pulgar ahora apunta en la dirección del vector de producto cruzado. →C=→A×→B. El vector de producto cruzado siempre→C es perpendicular a ambos vectores que están en el producto cruzado (el→A y el→B en el caso en cuestión). De ahí que si los dibujas de manera que ambos vectores que están en el producto cruzado estén en el plano de la página, el vector de producto cruzado siempre será perpendicular a la página, ya sea directamente dentro de la página, o directamente fuera de la página. En el caso que nos ocupa, es sacado directamente de la página.
Cuando utilizamos el producto cruzado para calcular el par debido a una fuerza→F cuyo punto de aplicación tiene un vector de posición→r, relativo al punto sobre el que estamos calculando el par, obtenemos un vector de par axial→τ. Para determinar el sentido de rotación al que correspondería dicho vector de par, alrededor del eje definido por el propio vector de par, utilizamos La regla de la mano derecha para algo rizado Algo recto. Tenga en cuenta que estamos calculando el par con respecto a un punto en lugar de un eje, el eje alrededor del cual actúa el par, sale en la respuesta.
Cálculo del Producto Cruzado de los Vectores que se dan enˆi,ˆj,ˆk Notación
Los vectores unitarios permiten un cálculo directo del producto cruzado de dos vectores incluso en las circunstancias más generales, por ejemplo, circunstancias en las que cada uno de los vectores apunta en una dirección arbitraria en un espacio tridimensional. Para aprovechar el método, necesitamos conocer el producto cruzado de los vectoresˆi, ˆj and ˆk unitarios del eje de coordenadas cartesianas entre sí.
En primer lugar, hay que señalar que cualquier vector cruzado en sí mismo da cero. Esto es evidente a partir de la ecuación???:
|→A×→B|=ABsinθ
porque si A y B van en la misma dirección, entoncesθ=0∘, y desde entoncessin0∘=0, tenemos|→A×→B|=0. En cuanto a los vectores unitarios, esto significa que:
ˆi׈i=0
ˆj׈j=0
ˆk׈k=0
A continuación observamos que la magnitud del producto cruzado de dos vectores que son perpendiculares entre sí es solo el producto ordinario de las magnitudes de los vectores. Esto también es evidente a partir de la ecuación???:
|→A×→B|=ABsinθ
porque si→A es perpendicular a→B entoncesθ=90∘ ysin90∘=1 así
|→A×→B|=AB
Ahora si→A y→B son vectores unitarios, entonces sus magnitudes son ambas 1, entonces, el producto de sus magnitudes también es 1. Además, los vectores unitariosˆi, ˆj and ˆk son todos perpendiculares entre sí por lo que la magnitud del producto cruzado de cualquiera de ellos con cualquier otro de ellos es el producto de las dos magnitudes, es decir, 1.
Ahora, ¿qué tal la dirección? Usemos la regla de la mano derecha para obtener la dirección deˆi׈j:
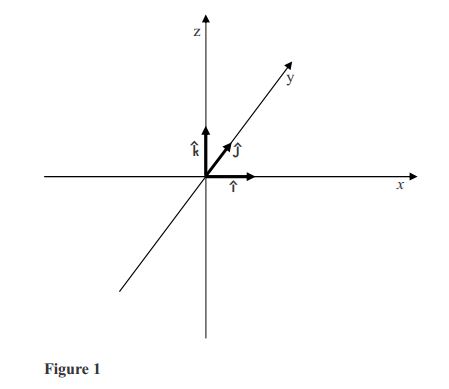
Con los dedos de la mano derecha apuntando directamente lejos del codo derecho, y en la misma dirección quehati, (el primer vector en 'ˆi׈j') para hacerlo de manera que si uno cerrara los dedos, apuntarían en la misma dirección queˆj, la palma debe estar orientada en la dirección +y. Siendo ese el caso, el pulgar extendido debe estar apuntando en la dirección +z. Al juntar la información de magnitud (la magnitud de cada vector unitario es 1) y dirección (+z), vemos queˆi׈j=ˆk. De igual manera:ˆj׈k=ˆiˆk׈i=ˆj,ˆj׈i=−ˆk,ˆk׈j=−ˆi,, yˆi׈k=−ˆj. Una forma de recordar esto es escribirˆi,ˆj,ˆk dos veces seguidas:
ˆi,ˆj,ˆk,ˆi,ˆj,ˆk
Luego, cruzando cualquiera de los tres primeros vectores en el vector inmediatamente a su derecha produce el siguiente vector a la derecha. Pero cruzar cualquiera de los tres últimos vectores en el vector inmediatamente a su izquierda produce el negativo del siguiente vector a la izquierda (“+ “de izquierda a derecha, pero de derecha a izquierda “- “).
Ahora estamos listos para ver el caso general. Cualquier vector se→A puede expresar en términos de vectores unitarios:
→A=Axˆi+Ayˆj+Azˆk
Hacer lo mismo para un vector→B entonces nos permite escribir el producto cruzado como:
→A×→B=(Axˆi+Ayˆj+Azˆk)×(Bxˆi+Byˆj+Bzˆk)
Usando la regla distributiva para la multiplicación podemos escribir esto como:
→A×→B=Axˆi×(Bxˆi+Byˆj+Bzˆk)+Ayˆj×(Bxˆi+Byˆj+Bzˆk)+Azˆk×(Bxˆi+Byˆj+Bzˆk)
→A×→B=Axˆi×Bxˆi+Axˆi×Byˆj+Axˆi×Bzˆk+Ayˆj×Bxˆi+Ayˆj×Byˆj+Ayˆj×Bzˆk+Azˆk×Bxˆi+Azˆk×Byˆj+Azˆk×Bzˆk
Usando, en cada término, la regla conmutativa y la regla asociativa para la multiplicación podemos escribir esto como:
→A×→B=AxBx(ˆi׈i)+AxBy(ˆi׈j)+AxBz(ˆi׈k)+AyBx(ˆj׈i)+AyBy(ˆj׈j)+AyBz(ˆj׈k)+AzBx(ˆk׈i)+AzBy(ˆk׈j)+AzBz(ˆk׈k)
Ahora evaluamos el producto cruzado que aparece en cada término:
→A×→B=AxBx(0)+AxBy(ˆk)+AxBz(−ˆj)+AyBx(−ˆk)+AyBy(0)+AyBz(ˆi)+AzBx(ˆj)+AzBy(−ˆi)+AzBz(0)
Eliminar los términos cero y agrupar los términos conˆi juntos, los términos conˆj juntos y los términos conˆk juntos rinde:
→A×→B=AyBz(ˆi)+AzBy(−ˆi)+AzBx(ˆj)+AxBz(−ˆj)+AxBy(ˆk)+AyBx(−ˆk)
La factorización de los vectores unitarios rinde:
→A×→B=(AyBz−AzBy)ˆi+(AzBx−AxBz)ˆj+(AxBy−AyBx)ˆk
que se puede escribir en una línea como:
→A×→B=(AyBz−AzBy)ˆi+(AzBx−AxBz)ˆj+(AxBy−AyBx)ˆk
Este es nuestro resultado final. Podemos llegar a este resultado mucho más rápido si tomamos prestada una herramienta de esa rama de las matemáticas conocida como álgebra lineal (las matemáticas de las matrices).
Formamos la3×3 matriz
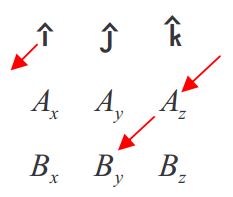
[ˆiˆjˆkAxAyAzBxByBz]
escribiendo\ hat {i},\ hat {j},\ hat {k} como la primera fila, luego los componentes del primer vector que aparece en el producto cruzado como la segunda fila, y finalmente los componentes del segundo vector que aparece en el producto cruzado como la última fila. Resulta que el producto cruzado es igual al determinante de esa matriz. Usamos signos de valor absoluto en toda la matriz para significar “el determinante de la matriz”. Así que tenemos:
→A×→B=|ˆiˆjˆkAxAyAzBxByBz|
Para tomar el determinante de una3×3 matriz se trabaja a su manera a través de la fila superior. Para cada elemento de esa fila tomas el producto de los elementos a lo largo de la diagonal que se extiende hacia abajo y hacia la derecha, menos el producto de los elementos hacia abajo y hacia la izquierda; y agregas los tres resultados (un resultado por cada elemento en la fila superior) juntos. Si no hay elementos hacia abajo y hacia el lado apropiado, se mueve hacia el otro lado de la matriz (ver abajo) para completar la diagonal.
Para el primer elemento de la primera fila, elˆi, bajar el producto y hacia la derecha,
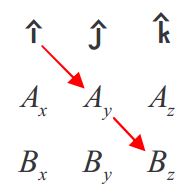
(esto rindeˆiAyBz)
menos el producto hacia abajo y hacia la izquierda
(el producto hacia abajo y hacia la izquierda esˆiAzBy)
Para el primer elemento de la primera fila, tenemos así:ˆiAyBz−ˆiAzBy que se puede escribir como:(AyBz−AzBy)ˆi. Repitiendo el proceso para el segundo y tercer elemento en la primera fila (laˆj y laˆk) obtenemos(AzBx−AxBz)ˆj y(AxBy−AyBx)ˆk respectivamente. Sumando los tres resultados, para formar el determinante de la matriz da como resultado:
→A×→B=(AyBz−AzBy)ˆi+(AzBx−AxBz)ˆj+(AxBy−AyBx)ˆk
como encontramos antes, “de la manera difícil”.