
4.1: Centro de Masa
- Page ID
- 129420
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Centro de masa de una colección de partículas
Hasta ahora solo hemos considerado dos casos: partículas individuales sobre las que actúa una fuerza (como una masa sobre un resorte), y pares de partículas que ejercen una fuerza unas sobre otras (como la gravedad). ¿Qué pasa si entran más partículas al juego? Bueno, entonces tenemos que calcular la fuerza total, por adición vectorial, y energía total, por adición regular. Etiquetemos las partículas con un número\(\alpha\), luego la fuerza total viene dada por:
\[F_{\text { total }}=\sum_{\alpha} \boldsymbol{F}_{\alpha}=\sum_{\alpha} m_{\alpha} \ddot{r}_{\alpha}=M \frac{\mathrm{d}^{2}}{\mathrm{d} t^{2}}\left(\frac{\sum_{\alpha} m_{\alpha} r_{\alpha}}{M}\right)=M \frac{\mathrm{d}^{2}}{\mathrm{d} t^{2}} r_{\mathrm{cm}}\]
donde hemos definido la masa total\(\sum_\alpha m_\alpha\) y el centro de masa\[r_{\mathrm{cm}}=\frac{1}{M} \sum_{\alpha} m_{\alpha} r_{\alpha} \label{cntrofmass}\]
Centro de masa de un objeto
La ecuación (\ ref {cntrofmass}) da el centro de masa de un conjunto discreto de partículas. Por supuesto, al final, cada objeto está construido a partir de un conjunto discreto de partículas, sus moléculas, pero sumarlas todas va a ser mucho trabajo. Intentemos hacerlo mejor. Considera una pequeña subunidad del objeto de volumen dV (mucho más pequeña que el objeto, pero mucho más grande que una molécula). Entonces la masa de esa subunidad es\(dm=\rho dV\), donde\(\rho\) está la densidad (masa por unidad de volumen) del objeto. La suma sobre todas estas masas nos da el centro de masa del objeto, por Ecuación (\ ref {cntrofmass}). Ahora tomando el límite de que el volumen de las subunidades va a cero, esto se convierte en una suma infinita sobre volúmenes infinitesimales, una integral. Entonces, para el centro de masa de un objeto continuo encontramos:
\[r_{\mathrm{cm}}=\frac{1}{M} \int_{V} \rho \cdot r \mathrm{d} V \label{intcm}\]
Tenga en cuenta que en principio ni siquiera necesitamos asumir que la densidad\(\rho\) es constante -si depende de la posición en el espacio, también podemos absorber eso en la discusión anterior, y terminar con la misma ecuación, pero ahora con\(\rho (r)\). Eso hará que la integral sea mucho más difícil de evaluar, pero no necesariamente imposible. También tenga en cuenta que la masa total M del objeto viene dada simplemente por\(\rho \cdot V\), donde V es el volumen total, si la densidad es constante, y por\(\int_V \rho (r) dV\) lo demás. Por lo tanto, si la densidad es constante, cae fuera de la Ecuación (\ ref {intcm}), y podemos reescribirla como
\[r_{\mathrm{cm}}=\frac{1}{V} \int_{V} r \mathrm{d} V \quad \text { for constant density } \rho\]
Desafortunadamente, muchos libros de texto introducen el concepto confuso de un elemento de masa infinitesimal dm, en lugar de un elemento de volumen dV con masa\(\rho dV\). Este extraño hábito muchas veces despide a los estudiantes, y el concepto es totalmente innecesario, así que no lo adaptaremos aquí.
La ecuación (\ ref {intcm}) es válida para cualquier objeto continuo, pero puede resultar confuso si se considera un objeto lineal o plano, ya que puede preguntarse cómo se definen el elemento de densidad\(\rho\) y volumen dV en una y dos dimensiones. Hay dos salidas. Una es decir que todos los objetos físicos son tridimensionales -incluso un palo muy delgado tiene una sección transversal. Si dices que la sección transversal tiene el área A (que es constante a lo largo del palo, o la aproximación de la barra delgada no sería válida), y la coordenada a lo largo de la barra es x, el elemento de volumen simplemente se convierte en dv=adX, y la integral en la ecuación (\ ref {intcm}) se reduce a una integral unidimensional. Puede acercarse a los objetos bidimensionales de la misma manera, dándoles un pequeño grosor\(\delta z\) y escribiendo el elemento volumen como\(dV=\delta z dA\). Alternativamente, se pueden definir análogos unidimensionales y bidimensionales de la densidad: la masa por unidad de longitud\(\lambda\) y la masa por unidad de área\(\sigma\), respectivamente. Con esos, los equivalentes unidimensionales y bidimensionales de la ecuación (\ ref {intcm}) están dados por
\[x_{\mathrm{cm}}=\frac{1}{M} \int_{0}^{L} \lambda x \mathrm{d} x, \text { and } r_{\mathrm{cm}}=\frac{1}{M} \int_{A} \rho \cdot r \mathrm{d} A \label{xcmrcm}\]
donde M sigue siendo la masa total del objeto.
4.1.3. Ejemplo trabajado: centro de masa de un hemisferio sólido
Solución
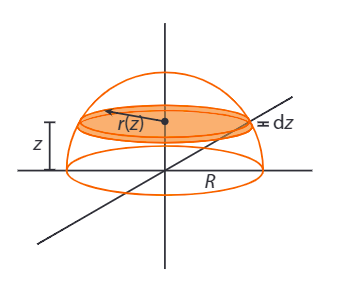
Por simetría, el centro de masa de una esfera sólida debe estar en su centro. El centro de masa de un hemisferio no se puede adivinar tan fácilmente, por lo que debemos calcularlo. Por supuesto, todavía debe estar sobre el eje de simetría, pero para calcular dónde en ese eje, usaremos la ecuación\ ref {xcmrcm}. Para llevar a cabo la integral, haremos uso de la simetría que aún tiene el sistema, y cortaremos nuestro hemisferio en rodajas finas de igual espesor dz, ver Figura 4.1.1. El volumen de tal corte dependerá entonces de su posición z, y estará dado por\(\mathrm{d} V=\pi r(z)^{2} \mathrm{d} z\), donde r (z) es el radio a la altura z. Poniendo el origen en la parte inferior del hemisferio, obtenemos fácilmente\(r(z)=\sqrt{R^{2}-z^{2}}\), donde R es el radio del hemisferio. El vector de posición r en la Ecuación\ ref {xcmrcm} simplemente se convierte en (0, 0, z), así obtenemos:
\[z_{\mathrm{cm}}=\frac{1}{\frac{2}{3} \pi R^{3}} \int_{0}^{R} z \pi\left(R^{2}-z^{2}\right) \mathrm{d} z=\frac{3}{2 R^{3}}\left[\frac{1}{2} z^{2} R^{2}-\frac{1}{4} z^{4}\right]_{0}^{R}=\frac{3}{8} R\]
El centro de masa del hemisferio sólido se encuentra así en\(r_{cm}=(0, 0, \frac{3R}{8})\)