
5.8: Movimiento Rodante y Deslizante
- Page ID
- 129554
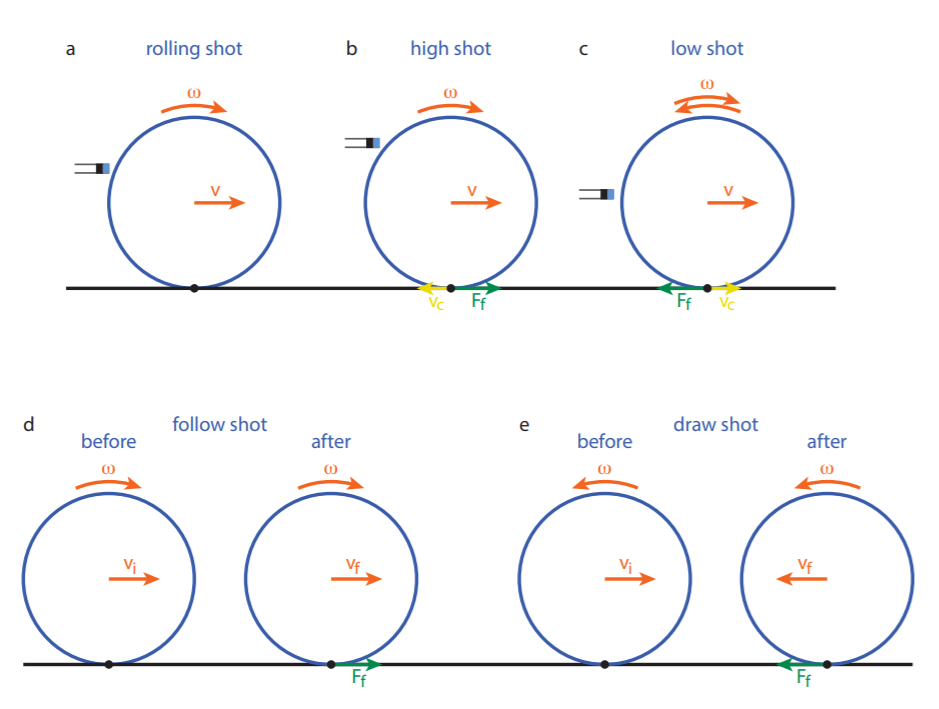
Cuando desliza un objeto sobre una superficie (digamos, un libro sobre una mesa), normalmente se ralentizará rápidamente, debido a las fuerzas de fricción. Cuando haces lo mismo con un objeto redondo, como una botella de agua, inicialmente puede deslizarse un poco (sobre todo si lo empujas con fuerza), pero rápidamente comenzará a girar. Se puede comprobar fácilmente que al girar, el objeto pierde mucha menos energía cinética para trabajar que cuando se desliza: toma la misma botella de agua, ya sea en su parte inferior (solo deslizante) o de costado (un poco deslizante más rodante), empujarla con la misma fuerza inicial, y suelte: la botella rodante llega mucho más lejos. No obstante, algo irónicamente, la botella sólo puede rodar gracias a la fricción. Para comenzar a rodar, necesita cambiar su momento angular, lo que requiere un par, el cual es proporcionado por la fuerza de fricción que actúa sobre la botella.
Cuando una botella (o bola, o cualquier objeto redondo) rueda, la velocidad instantánea del punto que toca la superficie sobre la que rueda es cero. En consecuencia, su velocidad de rotación\(\omega\) y la velocidad de traslación de su centro de rotación\(v_r\) (donde el subíndice r es para indicar balanceo) están relacionadas por\(v_r = \omega R\), con R el radio relevante de nuestro objeto. Si el centro de rotación del objeto se mueve más rápido que\(v_r\), la rotación no puede “mantenerse al día” y el objeto se desliza sobre la superficie. A este tipo de movimiento le llamamos deslizamiento. Debido a la fricción, los objetos que experimentan movimientos deslizantes suelen ralentizar rápidamente hasta\(v_r\), momento en el que ruedan sin deslizarse.
Supongamos que empezamos nuestro objeto con una velocidad\(v_0\). Si no hay rotación, la única fuerza que cambia su velocidad es la fuerza de fricción constante
\[F_{\text{friction}} = \mu _k FN = \mu _k mg\]
con\(m\) la masa del objeto (Ecuación 2.2.7). La fuerza constante da como resultado una disminución lineal en la velocidad de traslación (ver Sección 2.3):\(v(t) = v_0 −\mu _k gt\). Sin embargo, si nuestro objeto puede rodar, hay una segunda contribución al movimiento, debido al par\(\tau _{\text{friction}} = F_{\text{friction}} R\) de torsión de la fuerza de fricción. Usando el análogo rotacional de la segunda ley de Newton, Ecuación 5.4.1 (o escribiendo\(L = I \omega\) y usando la Ecuación 5.7.1), obtenemos una ecuación de movimiento para la velocidad de rotación:
\[I \alpha=I \frac{\mathrm{d} \omega}{\mathrm{d} t}=\tau_{\text { friction }}=F_{\text { friction }} R \label{ialpha}\]
Integrando la Ecuación\ ref {ialpha} con condición inicial\(\omega(t=0)=0\) obtenemos\(\omega(t)=\frac{\mu_{\mathrm{k}} m g R t}{I}\). Mientras el objeto experimenta un movimiento de deslizamiento, la velocidad de traslación disminuye linealmente con el tiempo, mientras que la velocidad de rotación aumenta linealmente. Para encontrar el tiempo y la velocidad a la que el objeto entra en un movimiento puramente rodante, simplemente nos equiparamos\(v(t)\) con\(\omega(t) R\), que da
\[t_{\mathrm{r}}=\frac{v_{0}}{\mu_{\mathrm{k}} g\left(1+\frac{m R^{2}}{I}\right)}\]
\[v_{\mathrm{r}}=\frac{v_0}{1+\frac{I}{m R^2}}\]
Tenga en cuenta que el tiempo\(t_r\) hasta que se alcanza el movimiento completamente rodante se escala inversamente con el coeficiente de fricción, pero la velocidad de laminación final\(v_r\) es independiente de la fuerza de fricción. La velocidad de rodadura sí depende del momento de inercia de tu objeto - para un cilindro hueco lo es\(v_{\mathrm{r}}=\frac{1}{2} v_{0}\), mientras que para un cilindro sólido lo es\(v_{\mathrm{r}}=\frac{2}{3} v_{0}\). Una vez que el objeto está rodando, su superficie ya no se mueve con respecto a la superficie sobre la que está rodando (ya que su velocidad instantánea en el punto de tocar es cero). En consecuencia, la fuerza de fricción se reduce mucho, y el objeto puede rodar una gran distancia antes de que se detenga; de hecho, la fuerza principal que lo ralentiza una vez que está rodando es el arrastre con el aire ambiente, lo que podríamos ignorar con seguridad cuando la fricción (cinética) aún estaba en la imagen.
5.8.1 Ejemplo trabajado: Un cilindro rodando por una pendiente
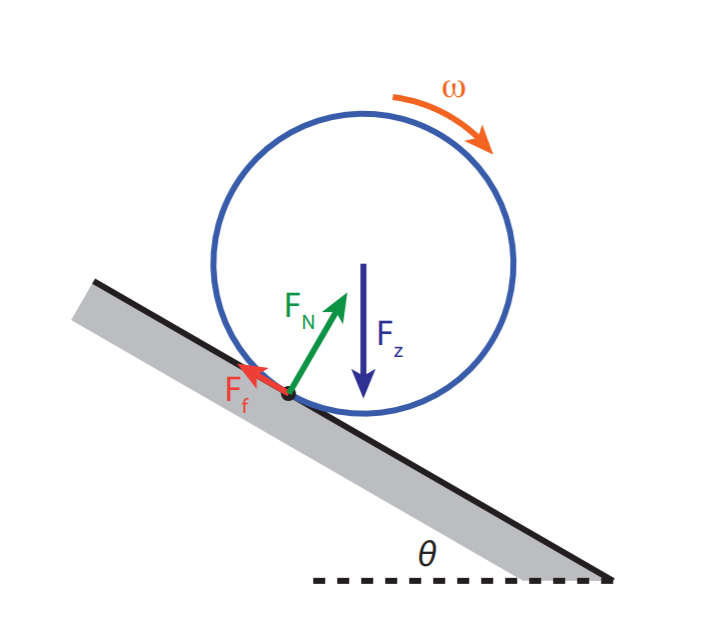
Un cilindro masivo con masa m y radio R rueda sin deslizarse por un plano inclinado en ángulo\(\theta\). El coeficiente de fricción (estática) entre el cilindro y el plano es\(\mu\). Encuentra la aceleración lineal del cilindro.
Solución
Hay al menos tres formas de abordar este problema. Para los tres, ayuda (como siempre) a hacer un boceto, indicando las fuerzas relevantes - ver Figura 5.8.2.
- Método 1: Fuerzas y pares de torsión.
Deje que la fuerza de fricción\(F_f\) sea positiva en la dirección hacia arriba del plano. Entonces tenemos:
\[\begin{aligned} F=m a & \Rightarrow m g \sin \theta-F_{\mathrm{f}}=m a \\ \tau=I \alpha & \Rightarrow F_{\mathrm{f}} R=\frac{1}{2} m R^{2} \alpha \\ \text { no slipping } & \Rightarrow a=\alpha R \end{aligned}\]
Las dos últimas ecuaciones dan\(F_f = \frac{1}{ 2}ma\). Al enchufar esto a la primera ecuación da
\[a=\frac{g \sin \theta}{1+\frac{1}{2}}=\frac{2}{3} g \sin \theta\]
- Método 2: Energía.
La energía total del sistema viene dada por
\[E_{\mathrm{tot}}=K+V=\frac{1}{2} m v^{2}+\frac{1}{2} I \omega^{2}+m g h\]
Si el cilindro rueda hacia abajo de la pendiente sin deslizarse, sus velocidades angulares y lineales están relacionadas a través de\(v=\omega R\). Además, si se mueve una distancia\(\Delta x\), su altura disminuye en\(\Delta x \cdot \sin \theta\). La conservación de la energía da entonces:
\[\begin{aligned} 0 &=\frac{\mathrm{d} E_{\mathrm{tot}}}{\mathrm{d} t}=\frac{\mathrm{d}}{\mathrm{d} t}\left[\frac{1}{2} m v^{2}+\frac{1}{2} I\left(\frac{v}{R}\right)^{2}-m g x \sin \theta\right] \\ &=m v \dot{v}+I \frac{v \dot{v}}{R^{2}}-m g v \sin \theta \\ &=\left[a+\frac{1}{2} a-g \sin \theta\right] m v \end{aligned}\]
donde usamos\(I = \frac{1}{2}mR^2\) para un cilindro masivo en la última línea. La aceleración lineal a es así dada por\(a=\frac{2}{3} g \sin \theta\).
- Método 3: Versión rotacional de la segunda ley de Newton.
En un momento dado, podemos aplicar la versión rotacional de la segunda ley de Newton a las rotaciones alrededor del punto donde el cilindro toca la superficie (ya que el cilindro está rodando sin resbalar, este es el único movimiento en ese punto). De las tres fuerzas en el sistema, dos actúan en ese punto, por lo que no tienen brazo de palanca. Solo la gravedad tiene un brazo de palanca distinto de cero de longitud\(R \sin \theta\), lo que lleva a un par dado por\(\tau_{z}=m g R \sin \theta\). Por la versión rotacional de la segunda ley de Newton, tenemos\(\tau= I \alpha\), donde yo es el momento de inercia sobre el pivote. Aplicando el teorema de ejes paralelos, nos encontramos\(I=I_{\mathrm{cm}}+m d^{2}=\frac{3}{2} m R^{2}\) en este caso, por lo que obtenemos una aceleración angular de
\[\alpha=\frac{\tau_{z}}{I}=\frac{m g R \sin \theta}{\frac{3}{2} m R^{2}}=\frac{2 g}{3 R} \sin \theta\]
La aceleración lineal del centro del cilindro debido a la 'rotación' alrededor de este pivote viene dada por\(a=R \alpha=\frac{2}{3} g \sin \theta\).