
2.3: Momentos de inercia de algunas formas simples
- Page ID
- 131127

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Un estudiante bien puede preguntar: “¿Por cuántas formas diferentes de cuerpo debo comprometer a la memoria las fórmulas para sus momentos de inercia?” Yo estaría tentado a decir: “Ninguno”. No obstante, si alguno va a ser comprometido con la memoria, sugeriría que la lista a memorizar se limite a esos pocos cuerpos que probablemente se encuentren muy a menudo (sobre todo si pueden ser utilizados para determinar rápidamente los momentos de inercia de otros cuerpos) y para los cuales es más fácil recordar los fórmulas que derivarlas. Con eso en mente recomendaría aprender no más de cinco. A continuación, se supone que cada cuerpo es de masa\( m\) e inercia rotacional\( I\) .
Una varilla de longitud\( 2l \) alrededor de un eje a través del centro, y en ángulo recto con la varilla:
\[ I = \dfrac{1}{3}ml^{2} \tag{2.3.1}\label{eq:2.3.1} \]
Un disco circular uniforme del\(a\) about an axis through the center and perpendicular to the plano del radio del disco:
\[ I = \dfrac{1}{2}ma^{2} \tag{2.3.2}\label{eq:2.3.2} \]
Una lámina triangular uniforme en ángulo recto alrededor de uno de sus lados más cortos, es decir, no la hipotenusa. El otro lado no hipotenuso es de longitud\( a\):
\[ I = \dfrac{1}{6}ma^{2} \tag{2.3.3}\label{eq:2.3.3} \]
Una esfera sólida uniforme de radio\( a\) about an axis through the center.
\[ I = \dfrac{2}{5}ma^{2} \tag{2.3.4}\label{eq:2.3.4} \]
Un caparazón esférico uniforme de radio\( a\) about an axis through the center.
\[ I = \dfrac{2}{3}ma^{2} \tag{2.3.5}\label{eq:2.3.5} \]
Ahora voy a derivar los tres primeros de estos por cálculo. Las derivaciones para las esferas se dejarán para más tarde.
1.Varilla, longitud\( 2l \) (Figura II.2)

La masa de un elemento\(\delta x\) at a distance \( x \) desde la mitad de la varilla es\( \dfrac{m\delta x}{2l}\).
y su segundo momento de inercia es
\[ \dfrac{mx^{2}\delta x}{2l}. \nonumber \]
\[\dfrac{m}{2l} \int_{-l}^{l} x^{2} dx = \dfrac{m}{l} \int_0^l x^{2} dx = \dfrac{1}{3}ml^{2}. \nonumber \]
2. Disco, radio\( a\) . (Figura II.3)
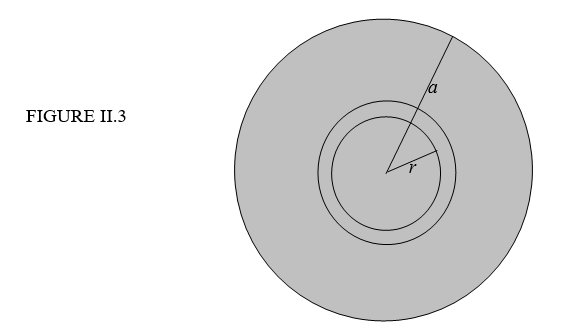
El área de un anillo elemental, radios \( r \) is \(r + \delta r \) is \(2 \pi r \delta r\).
The area of the entire disc is \(\pi a^{2} \).
Therefore the mass of the annulus is
\[\dfrac{2 \pi r \delta rm}{\pi a^{2}} = \dfrac{2mr\delta r}{a^{2} } . \nonumber \]
and its second moment of inertia is
\[\dfrac{2mr^{3}\delta r}{a^{2}}. \nonumber \]
The moment of inertia of the entire disc is
\[\dfrac{2m}{a^{2}} \int_{0}^{a} r^{3} dr = \dfrac{1}{2}ma^{2}. \nonumber \]
3. Right-angled triangular lamina. (Figure II.4)
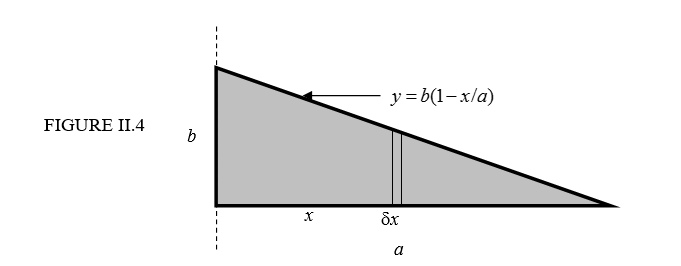
La ecuación a la hipotenusa es\(y = b(1 - x/a)\).
The area of the elemental strip is \(y \delta x = b(1 - x/a)\delta x \) and the area of the entire triangle is \( \dfrac{ab}{2} \).
Therefore the mass of the elemental strip is \( \dfrac{2m(a - x)\delta x}{a^{2}}\).
and its second moment of inertia is \( \dfrac{2mx^{2}(a - x)\delta x}{a^{2}}\).
The second moment of inertia of the entire triangle is the integral of this from \( x = 0 \) to \( x = a\) , which is \( \dfrac{ma^{2}}{6} \).
Uniform circular lamina about a diameter.
For the sake of one more bit of integration practice, we shall now use the same argument to show that the moment of inertia of a uniform circular disc about a diameter is \( \dfrac{ma^{2}}{4}\). However, we shall see later that it is not necessary to resort to integral calculus to arrive at this result, nor is it necessary to commit the result to memory. In a little while it will become immediately apparent and patently obvious, with no calculation, that the moment of inertia must be \( \dfrac{ma^{2}}{4}\). However, for the time being, let us have some more calculus practice. See Figure II.5.

El disco es de radio\( a \), and the area of the elemental strip is \( 2y \delta x\). But \( y \) and \( x \) are related through the equation to the circle, which is \( y=(a^{2}-x^{2})^{1/2}\). Therefore the area of the strip is \( 2(a^{2} - x^{x})^{1/2} \delta x \). El área de todo el disco es\(\pi a^{2}\), por lo que la masa de la tira es
\[m \times \dfrac{2(a^{2} - x^{2})^{1/2}\delta x}{\pi a^{2}} = \dfrac{2m}{\pi a^{2}} \times (a^{2} - x^{2})^{1/2}\delta x. \nonumber \]
El segundo momento de inercia alrededor del\(y\) eje es
\[\dfrac{2m}{\pi a^{2}} \times x^{2}(a^{2} - x^{2})^{1/2}\delta x. \nonumber \]
Para todo el disco, integramos desde\( x = -a \) to \( x = +a \), or, if you prefer, from \( x = 0 \) to \( x = a \) and then double it. The result \( \dfrac{ma^{2}}{4} \) should follow. If you need a hint about how to do the integration, let \( x = a cos \theta \) (which it is, anyway), and be sure to get the limits of integration with respect to \(\theta\) right.
El momento de inercia de una lámina de masa semicircular uniforme\( m \) and radius \( a \) about its base, or diameter, is also \( \dfrac{ma^{2}}{4} \), since the mass distribution with respect to rotation about the diameter is the same. \( \dfrac{ma^{2}}{4} \), since the mass distribution with respect to rotation about the diameter is the same.