
13.3: Restricciones Holonómicas
- Page ID
- 130957

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)La descripción completa de un sistema de partículas\( N\) no restringidas requiere\( 3N\) coordenadas. Se puede pensar en el estado del sistema en cualquier momento como representado por un solo punto en el espacio\( 3N\) -dimensional. Si el sistema consiste en moléculas en un gas, o un cúmulo de estrellas, o un enjambre de abejas, las coordenadas van a cambiar continuamente, y el punto que describe el sistema se moverá, quizás completamente sin restricciones, en su espacio\( 3N\) -dimensional.
Sin embargo, en muchos sistemas, las partículas pueden no ser libres de vagar por cualquier parte a voluntad; pueden estar sujetas a diversas restricciones. Una restricción que puede describirse mediante una ecuación que relaciona las coordenadas (y quizás también el tiempo) se denomina restricción holonómica, y la ecuación que describe la restricción es una ecuación holonómica. Si un sistema de\( N\) partículas está sujeto a restricciones\( k\) holonómicas, el punto en el espacio\( 3N\) dimensional que describe el sistema en cualquier momento no es libre de moverse en cualquier lugar del espacio\( 3N\) dimensional, sino que está limitado a moverse sobre una superficie de dimensión\( 3N-k\). En efecto, solo se necesitan\( 3N-k\) coordenadas para describir el sistema, dado que las coordenadas están conectadas por ecuaciones\( k\) holonómicas.
Por cierto, busqué la palabra “holonómica” en The Oxford English Dictionary y decía que la palabra era del griego ő\( \lambda\omicron\varsigma\), que significa “entero” o “entero” y\( \nu\grave{\omicron}\mu-\omicron\varsigma\), que significa “ley”. También dijo “aplicado a un sistema restringido en el que las ecuaciones que definen las restricciones son integrables o ya libres de diferenciales, de manera que cada ecuación reduce efectivamente el número de coordenadas en una; también se aplica a las propias restricciones”.
Como ejemplo, considere una barra de jabón húmedo deslizándose alrededor en una cuenca hemisférica de radio\( a\). Se puede describir su posición en la cuenca por medio de los dos ángulos esféricos habituales\( (\theta, \phi)\); el movimiento se ve limitado por su permanencia en contacto con la cuenca; es decir, está sujeto a la restricción holonómica\( r=a\). Así, en lugar de necesitar tres coordenadas para describir la posición de una partícula totalmente sin restricciones, solo necesitamos dos coordenadas.
O de nuevo, consideremos el péndulo doble que se muestra en la Figura XIII.1, y supongamos que el péndulo está obligado a oscilar solo en el plano del papel —o de la pantalla del monitor de su computadora.
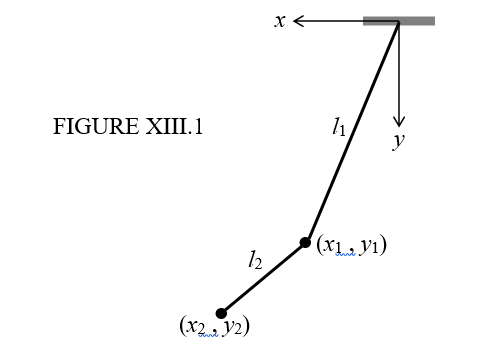
Dos partículas no restringidas requerirían seis coordenadas para especificar sus posiciones, pero este sistema está sujeto a cuatro restricciones holonómicas. Las ecuaciones holonómicas\( z_{1}=0\) y\( z_{2}=0\) limitan las partículas para que se muevan en un plano, y, si las cuerdas se mantienen tensas, tenemos las restricciones holonómicas adicionales\( x_{1}^{2}+y_{1}^{2}=l_{1}^{2}\) y\( (x_{2}-x_{1})^{2}+(y_{2}-y_{1})^{2}=l_{2}^{2}\). Por lo tanto, solo se necesitan dos coordenadas para describir el sistema, y convenientemente podrían ser los ángulos que las dos cuerdas hacen con la vertical.