
17.5: Péndulo Doble
- Page ID
- 131405

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Este es otro problema similar, sin embargo, en lugar de asumir la ley de Hooke, asumiremos que los ángulos son pequeños (\( \sin \theta \approx \theta , \cos \theta \approx 1 - \frac{1}{2} \theta^2\)). Para mayor claridad de dibujo, sin embargo, he dibujado grandes ángulos en la Figura XVIII.4.
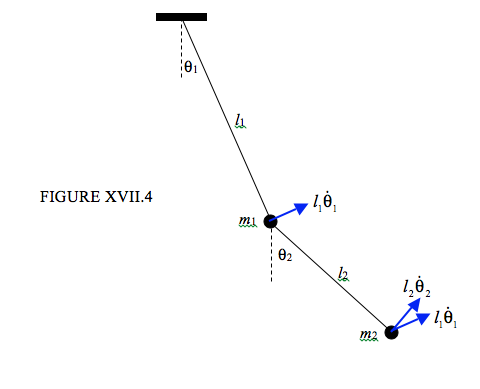
Porque voy a usar las ecuaciones lagrangianas del movimiento, no he marcado en las fuerzas y aceleraciones; más bien, he marcado en las velocidades. Espero que los dos componentes de la velocidad de la\(m_{2} \) que he marcado sean autoexplicativos; la velocidad de la\(m_{2} \) viene dada por\( v^2_{2} = l^2_{1}\dot{\theta}^2_{1} + l^2_{2}\dot{\theta}^2_{2} + 2 l_{1}l_{2}\dot{\theta}_1 \dot{\theta}_2 \cos(\theta_2- \theta_1) \). Las energías cinéticas y potenciales son
\ [T =\ frac {1} {2} m_1l^2_1\ punto {\ theta} ^2_1 +\ frac {1} {2} m_1
[l^2_1\ punto {\ theta} ^2_1 + l^2_2\ punto {\ theta} ^2_2 + 2l_1l_2\ punto {\ theta} _1\ punto {\ theta} _2\ cos (\ theta_2 -\ theta_1)],\ label {17.5.1}\]
\[ V = constant - m_1gl_1 \cos \theta_1 - m_2g(l_1\cos \theta_1 + l_2 \cos \theta_2). \label{17.5.2} \]
Si ahora hacemos la aproximación de ángulo pequeño, estos se convierten
\[ T = \frac{1}{2} m_1l^2_1 \dot{\theta}^2_1 + \frac{1}{2} m_2(l_1 \dot{\theta}_1 + l_2 \dot{\theta}_2)^2 \label{17.5.3} \]
y
\[ V = contant + \frac{1}{2}m_1gl_1\theta^2_1 + \frac{1}{2}m_1g(l_1\theta^2_1 + l_2\theta^2_2) - m_1gl_1 - m_2gl_2. \label{17.5.4} \]
Aplicar la ecuación lagrangiana a su vez a\( \theta_1\) y\( \theta_2\):
\[ (m_1 + m_2)l^2_1\ddot{\theta}_1 + m_2l_1l_2\ddot{\theta} = -(m_1 + m_2)gl_1 \theta_1 \label{17.5.5} \]
y
\[ m_2l_1l_2 \ddot{\theta}_1 + m_2l^2_2 \ddot{\theta}_2 = -m_2gl_2\theta_2. \label{17.5.6} \]
Buscar soluciones en la forma de\( \dot{\theta}_1 = - \omega \theta_1 \) y\( \dot{\theta}_2 = - \omega^2 \theta_2 \).
Entonces
\[ (m_1 + m_2)(l_2 \omega^2 -g)\theta_1 + m_2l_1l_2 \omega^2 \theta_2 = 0 \label{17.5.7} \]
y
\[ l_1 \omega^2\theta_1 + (l_2\omega^2 - g)\theta_2 =0. \label{17.5.8} \]
Cualquiera de estos da la relación de desplazamiento\( \theta_2/\theta_1 \). Equiparar las dos expresiones para la relación\( \theta_2/\theta_1 \), o poner el determinante de los coeficientes a cero, da la siguiente ecuación para las frecuencias de los modos normales:
\[ m_1l_1l_2\omega^4 - (m_1+m_2)g(l_1+l_2)\omega^2 + (m_1+m_2)g^2 = 0. \label{17.5.9} \]
Como en los ejemplos anteriores, hay un modo lento en fase y un modo rápido fuera de fase.
Por ejemplo, supongamos\(m_1\) = 0.01 kg,\(m_2\) = 0.02 kg,\(l_1 \) = 0.3 m,\(l_2\) = 0.6 m,\(g\) = 9.8 m s −2.
Entonces\( 0.0018\omega^4 - 0.02446\omega^2 = 0\). La solución lenta es\( \omega \) = 3.441 rad s −1 (\( P \)= 1.826 s), y la solución rápida es\(\omega \) = 11.626 rad s −1 (\(P\)=0.540 s). Si ponemos la primera de éstas (la solución lenta) en cualquiera de las ecuaciones 17.5.7 u 8 (o ambas, como comprobación contra errores) obtenemos la relación de desplazamiento\( \theta_2 / \theta_1 \) = 1.319, que es un modo en fase. Si ponemos la segunda (la solución rápida) en cualquiera de las dos ecuaciones, obtenemos\( \theta_2 / \theta_1 \) = −0.5689, que es un modo fuera de fase. Si comenzaras con\( \theta_2 / \theta_1 \) = 1.319 y lo soltaras, el péndulo oscilaría en el modo lento en fase. Si comenzaras con\( \theta_2 / \theta_1 \) = −0.5689 y lo soltaras, el péndulo oscilaría en el modo rápido fuera de fase. De lo contrario el movimiento sería una combinación lineal de los modos normales, con la fracción de cada uno determinada por las condiciones iniciales, como en el ejemplo de la Sección 17.3.