
2.7: Centro de masa de un sistema de muchos cuerpos
- Page ID
- 126794
Un cuerpo de tamaño finito necesita un punto de referencia con respecto al cual se pueda describir el movimiento. Por ejemplo, hay 8 esquinas de un cubo que podrían servir como puntos de referencia, pero el movimiento de cada esquina es complicado si el cubo se traslada y gira a la vez. El tratamiento del comportamiento de cuerpos de tamaño finito, o sistemas de muchos cuerpos, se simplifica enormemente utilizando el concepto de centro de masa. El centro de masa es un punto fijo particular en el cuerpo que tiene una propiedad especialmente valiosa; es decir, el movimiento de traslación de un cuerpo de tamaño finito puede tratarse como el de una masa puntual ubicada en el centro de masa. Además, el movimiento de traslación es separable del movimiento rotacional-vibracional de un sistema de muchos cuerpos cuando se describe el movimiento con respecto al centro de masa. Así es conveniente en esta coyuntura introducir el concepto de centro de masa de un sistema de muchos cuerpos.
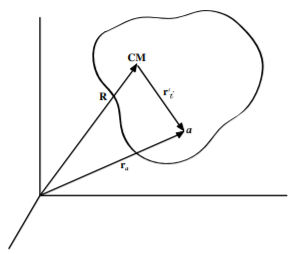
Para un sistema de muchos cuerpos, el vector de posición\(\mathbf{r}_i\), definido en relación con el sistema de laboratorio, está relacionado con el vector de posición\(\mathbf{r}_i^\prime\) con respecto al centro de masa, y la ubicación del centro de masa en\(\mathbf{R}\) relación con el sistema de laboratorio. Es decir, como se muestra en la Figura\(\PageIndex{1}\)
\[\label{2.22}\mathbf{r}_i = \mathbf{R} +\mathbf{r}^\prime_i\]
Esta relación vectorial define la transformación entre los sistemas de laboratorio y centro de masa. Para sistemas discretos y continuos respectivamente, la ubicación del centro de masa se define únicamente como donde
\[ \label{eq:Center of mass definition}\tag{Center of mass definition}\sum^n_i m_i \mathbf{r}^\prime_i = \int \mathbf{r}^\prime \rho dV = 0\]
Definir la masa total
\[\label{eq:Total mass}\tag{Total mass}M=\sum_i^n m_i = \int_{body}\rho dV\]
La ubicación promedio del sistema corresponde a la ubicación del centro de masa ya\( \frac{1}{M}\sum_im_i\mathbf{r}^\prime_i = 0\) que es
\[\label{eq:2.23}\frac{1}{M}\sum_im_i\mathbf{r}_i =\mathbf{R} + \frac{1}{M}\sum_im_i\mathbf{r}^\prime_i = \mathbf{R}\]
El vector\(\mathbf{R}\) que describe la ubicación del centro de masa, depende del origen y del sistema de coordenadas elegido. Para una distribución de masa continua, el vector de ubicación del centro de masa viene dado por
\[\label{eq:2.24}\mathbf{R}=\frac{1}{M}\sum_im_i\mathbf{r}_i=\frac{1}{M}\int\mathbf{r}\rho dV\]
El centro de masa se puede evaluar calculando los componentes individuales a lo largo de tres ejes ortogonales.
El marco de referencia del centro de masa se define como el marco para el que el centro de masa es estacionario. Este marco de referencia es especialmente valioso para dilucidar la física subyacente que involucra solo el movimiento relativo de los muchos cuerpos. Es decir, el movimiento traslacional trivial del marco del centro de masa, que no influye en el movimiento relativo de los cuerpos, se factoriza y puede ignorarse. Por ejemplo, una pelota de tenis que\( (0.06 \ kg ) \) se aproxima a la tierra\( ( 6 \times 10^{24} \ kg ) \) con velocidad\( v \) podría tratarse en tres cuadros, (a) asumir que la tierra está estacionaria, (b) asumir que la pelota de tenis es estacionaria, o (c) el marco del centro de masa. Este último marco ignora el movimiento del centro de la masa que no influye en el movimiento relativo de la pelota de tenis y la tierra. El centro de momento lineal y los marcos de coordenadas del centro de masa son idénticos en la mecánica newtoniana pero no en la mecánica relativista como se describe en el capítulo\(17.4.3\).