
2.8: Momentum lineal total de un sistema de muchos cuerpos
- Page ID
- 126827
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Descomposición del centro de masa
El momento lineal total\( \mathbf{P}\) para un sistema de\( n\) partículas viene dado por
\[ \label{eq:2.25} \mathbf{P}=\sum_i^n\mathbf{p}_i = \frac{d}{dt}\sum_i^nm_i\mathbf{r}_i\]
Es conveniente describir un sistema de muchos cuerpos mediante un vector de posición\( \mathbf{r}^\prime_i \) con respecto al centro de masa.
\[\label{eq:2.26}\mathbf{r}_i =\mathbf{R} + \mathbf{r}^\prime_i\]
Es decir,
\[\label{eq:2.27}\mathbf{P} = \sum_i^n\mathbf{p}_i = \frac{d}{dt}\sum_i^nm_i\mathbf{r}_i=\frac{d}{dt}M\mathbf{R}+ \frac{d}{dt}\sum_i^nm_i\mathbf{r}^\prime_i = \frac{d}{dt}M\mathbf{R}+0= M\mathbf{\dot R}\]
ya que\( \sum_i^nm_i\mathbf{r}^\prime_i=0 \) según lo dado por la definición del centro de masa. Es decir,
\[\label{eq:2.28}\mathbf{P}=M\mathbf{\dot R}\]
Así, el momento lineal total para un sistema es el mismo que el impulso de una sola partícula de masa\(M = \sum_i^n m_i\) ubicada en el centro de masa del sistema.
Ecuaciones de movimiento
La fuerza que actúa sobre la partícula\( i\) en un sistema de múltiples cuerpos de\(n\) partículas, se puede separar en una fuerza externa\(\mathbf{F}_i^{Ext}\) más fuerzas internas\(\mathbf{f}_{ij} \) entre las\(n\) partículas del sistema
\[\label{eq:2.29}\mathbf{F}_i=\mathbf{F}_i^E + \sum_{\substack{j \\ i \neq j}}^n \mathbf{f}_{ij}\]
El origen de la fuerza externa es desde el exterior del sistema mientras que la fuerza interna se debe a la interacción mutua entre las\( n\) partículas en el sistema. La Ley de Newton nos dice que
\[\label{eq:2.30} \mathbf{\dot p}_i=\mathbf{F}_i = \mathbf{F}_i^E + \sum_{\substack{j \\ i \neq j}}^n \mathbf{f}_{ij}\]
Por lo tanto, la tasa de cambio del impulso total es
\[\label{2.31}\mathbf{\dot{P}}=\sum_i^n\mathbf{\dot{p}}_i=\sum_i^n\mathbf{F}_i^E + \sum_i^n\sum_{\substack{j \\ i \neq j }}^n\mathbf{f}_{ij}\]
Tenga en cuenta que dado que los índices son ficticios entonces
\[\label{2.32}\sum_i\sum_{\substack{j \\ i\neq j}}^n\mathbf{f}_{ij}=\sum_j\sum_{\substack{i \\ i \neq j}}^n\mathbf{f}_{ji}\]
Sustituir la tercera ley de Newton\(\mathbf{f}_{ij} = -\mathbf{f}_{ji}\) en la Ecuación\ ref {2.32} implica que
\[\label{2.33}\sum_i\sum_{\substack{j \\ i \neq j }}^n\mathbf{f}_{ij}=\sum_{j}\sum_{\substack{i \\ i \neq j}}^n\mathbf{f}_{ji} = -\sum_i^n\sum_{\substack{j \\ i \neq j}}^n\mathbf{f}_{ij}=0\]
que se satisface únicamente para el caso en que las sumataciones sean iguales a cero. Es decir, por cada fuerza interna, hay una fuerza de reacción igual y opuesta que cancela esa fuerza interna.
Por lo tanto, la integral de primer orden para el momento lineal puede escribirse en formas diferenciales e integrales como
\[\label{2.34}\mathbf{\dot{P}}=\sum_i^n\mathbf{F}_I^E \hspace{5cm}\int_1^2\sum_i^n\mathbf{F}_i^Edt = \mathbf{P}_2 - \mathbf{P}_1\]
La reacción de un cuerpo a una fuerza externa es equivalente a una sola partícula de masa M localizada en el centro de masa asumiendo que las fuerzas internas cancelan debido a la tercera ley de Newton.
Tenga en cuenta que el momento lineal total\({\bf P}\) se conserva si la fuerza externa neta\({\bf F}^E\) es cero, es decir
\[\label{2.35} \mathbf{F}^E = \frac{d\mathbf{P}}{dt}= 0\]
Por lo tanto, el momento lineal total\({\bf P}\) del centro de masa es una constante. Además, si el componente de la fuerza a lo largo de cualquier dirección\({\bf \hat{e}}\) es cero, es decir,
\[\label{2.36}\mathbf{F}^E\cdot {\bf \hat{e}} = \frac{d\mathbf{P}\cdot {\bf \hat{e}}}{dt}=0\]
entonces\({\bf P \cdot \hat{e}}\) es una constante. Este hecho se utiliza frecuentemente para resolver problemas que involucran movimiento en un campo de fuerza constante. Por ejemplo, en el campo gravitacional de la tierra, el momento de un objeto que se mueve en vacío en la dirección vertical depende del tiempo debido a la fuerza gravitacional, mientras que la componente horizontal del momento es constante si ninguna fuerza actúa en la dirección horizontal.
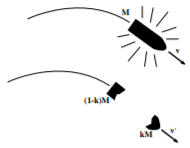
Ejemplo\(\PageIndex{1}\): Exploding cannon shell
Considere que un proyectil de cañón de masa\( M \) se mueve a lo largo de una trayectoria parabólica en el campo gravitacional de la tierra. Una explosión interna, que genera una cantidad\( E \) de energía mecánica, sopla el proyectil en dos partes. Una parte de la masa\( kM \), donde\( k < 1 \), continúa moviéndose a lo largo de la misma trayectoria con velocidad\( v^\prime \) mientras que la otra parte se reduce para descansar. Encuentra la velocidad de la masa\( kM \) inmediatamente después de la explosión.
Es importante recordar que la liberación de energía\( E \) se da en el centro de masa. Si la velocidad del proyectil inmediatamente antes de la explosión es\(v \) y\(v^\prime \) es la velocidad de la\( kM \) pieza inmediatamente después de la explosión, entonces la conservación de energía da eso\(\frac{1}{2}Mv^2 + E = \frac{1}{2}kMv^{\prime 2} T \). La conservación del impulso lineal da\(Mv = kMv^\prime \). Eliminando\(v \) de estas ecuaciones da
\[\nonumber v^\prime = \sqrt{\frac{2E}{ [ k (1-k) M ] }} \]
Ejemplo\(\PageIndex{2}\): Billiard-ball collisions
Una bola de billar con masa\(m \) y velocidad incidente\( v \) choca con una bola estacionaria idéntica. Supongamos que las bolas rebotan entre sí elásticamente de tal manera que la bola incidente se desvía en un ángulo de dispersión con respecto\( \theta \) a la dirección del incidente. Calcular las velocidades finales\(v_f \) y\( V_f \) de las dos bolas y el ángulo\( \phi \) de dispersión de la bola objetivo. La conservación del momento lineal en la dirección incidente\( x \), y la dirección perpendicular dan
\[ mv = mv_f \cos \theta + mV_f \cos \phi \\ 0 = mv_f \sin \theta - mV_f \sin \phi \nonumber\]
La conservación de energía da.
\[\nonumber \frac{m}{2}v^2 = \frac{m}{2}v_f^2 + \frac{m}{2}V_f^2\]
Resolver estas tres ecuaciones da\( \phi = 90^\circ - \theta \), es decir, las bolas rebotan perpendiculares entre sí en el marco del laboratorio. Las velocidades finales son
\[ \nonumber v_f = v \cos \theta \\ V_f = v \sin \theta \]