
11.2: Representación equivalente de un cuerpo para movimiento de dos cuerpos
- Page ID
- 126891
El movimiento de dos cuerpos,\(1\) y\(2\), interactuando a través de fuerzas centrales de dos cuerpos, requiere coordenadas\(6\) espaciales, es decir, tres cada uno para\(\mathbf{r}_{1}\) y\(\mathbf{r}_{2}\). Dado que la fuerza central de dos cuerpos solo depende\(\mathbf{r=r}_{1}-\mathbf{r}_{2}\) de la separación relativa de los dos cuerpos, es más conveniente separar los\(6\) grados de libertad en coordenadas\(3\) espaciales de movimiento relativo\(\mathbf{r,}\) más coordenadas\(3\) espaciales para la ubicación del centro de masa \(\mathbf{R}\)como se describe en el capítulo\(2.7\). Se mostrará aquí que la ecuación de movimiento para el movimiento relativo de los dos cuerpos en el centro de masa puede ser representada por un problema equivalente de un cuerpo que simplifica las matemáticas.
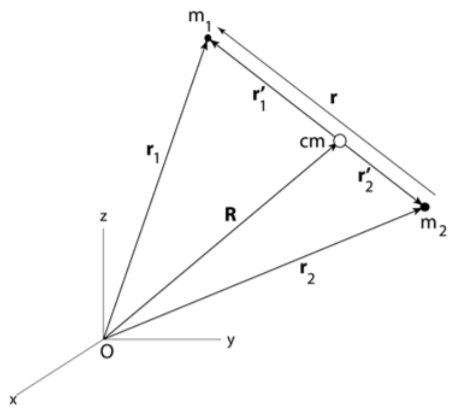
Considere dos cuerpos sobre los que actúa una fuerza central conservadora de dos cuerpos, donde los vectores de posición\(\mathbf{r} _{1}\) y\(\mathbf{r}_{2}\) especifican la ubicación de cada partícula como se ilustra en la Figura\(\PageIndex{1}\). Un conjunto alternativo de seis variables serían los tres componentes del vector de posición del centro de masa\(\mathbf{R}\) y los tres componentes especificando el vector de diferencia\(\mathbf{r}\) definido por la Figura\(\PageIndex{1}\). Definir los vectores\(\mathbf{r}_{1}^{\prime }\) y\(\mathbf{r} _{2}^{\prime }\) como los vectores de posición de las masas\(m_{1}\) y\(m_{2}\) con respecto al centro de masa. Entonces
\[\begin{align} \label{11.3} \mathbf{r}_{1} &=&\mathbf{R}+\mathbf{r}_{1}^{\prime } \\ \mathbf{r}_{2} &=&\mathbf{R}+\mathbf{r}_{2}^{\prime } \notag\end{align}\]
Por la definición del centro de masa
\[\mathbf{R}= \frac{m_{1}\mathbf{r}_{1}+m_{2}\mathbf{r}_{2}}{m_{1}+m_{2}}\]
y
\[m_{1}\mathbf{r}_{1}^{\prime }+m_{2}\mathbf{r}_{2}^{\prime }=0\]
para que
\[-\frac{m_{1}}{m_{2}}\mathbf{r}_{1}^{\prime }=\mathbf{r}_{2}^{\prime }\]
Por lo tanto
\[\mathbf{r}=\mathbf{r}_{1}^{\prime }-\mathbf{r}_{2}^{\prime }=\frac{ m_{1}+m_{2}}{m_{2}}\mathbf{r}_{1}^{\prime }\]
es decir,
\[\mathbf{r}_{1}^{\prime }=\frac{m_{2}}{m_{1}+m_{2}}\mathbf{r}\]
De igual manera;
\[\mathbf{r}_{2}^{\prime }=-\frac{m_{1}}{m_{1}+m_{2}}\mathbf{r}\]
Sustituyendo estos en la Ecuación\ ref {11.3} da
\[\begin{align} \mathbf{r}_{1} &=&\mathbf{R}+\mathbf{r}_{1}^{\prime }=\mathbf{R}+\frac{m_{2} }{m_{1}+m_{2}}\mathbf{r} \notag \\ \mathbf{r}_{2} &=&\mathbf{R}+\mathbf{r}_{2}^{\prime }=\mathbf{R}-\frac{m_{1} }{m_{1}+m_{2}}\mathbf{r} \label{11.10} \end{align} \]
Es decir, los dos vectores\(\mathbf{r}_{1},\mathbf{r}_{2}\) se escriben en términos del vector de posición para el centro de masa\(\mathbf{R}\) y el vector de posición\(\mathbf{r}\) para el movimiento relativo en el marco del centro de masa.
Suponiendo que la fuerza central de dos cuerpos es conservadora y representada por\(U(r)\), entonces el lagrangiano del sistema de dos cuerpos puede escribirse como
\[L=\frac{1}{2}m_{1}\left\vert \mathbf{\dot{r}}_{1}\right\vert ^{2}+\frac{1}{2} m_{2}\left\vert \mathbf{\dot{r}}_{2}\right\vert ^{2}-U(r)\]
Diferenciar ecuaciones\ ref {11.10}, con respecto al tiempo, e insertarlas en el lagrangiano, da
\[L=\frac{1}{2}M\left\vert \mathbf{\dot{R}}\right\vert ^{2}+\frac{1}{2}\mu \left\vert \mathbf{\dot{r}}\right\vert ^{2}-U(r)\]
donde la masa total\(M\) se define como
\[M=m_{1}+m_{2}\]
y la masa reducida\(\mu\) se define por
\[\mu \equiv \frac{m_{1}m_{2}}{m_{1}+m_{2}}\]
o equivalentemente\[\frac{1}{\mu }=\frac{1}{m_{1}}+\frac{1}{m_{2}}\]
El Lagrangiano total se puede separar en dos partes independientes
\[L=\frac{1}{2}M\left\vert \mathbf{\dot{R}}\right\vert ^{2}+L_{cm}\]
donde
\[L_{cm}=\frac{1}{2}\mu \left\vert \mathbf{\dot{r}}\right\vert ^{2}-U(r)\]
Suponiendo que no están actuando fuerzas externas, entonces\(\frac{\partial L}{ \partial \mathbf{R}}=0\) y las tres ecuaciones de Lagrange para cada una de las tres coordenadas de la\(\mathbf{R}\) coordenada pueden escribirse como
\[\frac{d}{dt}\frac{\partial L}{\partial \mathbf{\dot{R}}}=\frac{d\mathbf{P} _{cm}}{dt}=0\]
Es decir, para una fuerza central pura, el momento del centro de masa\(\mathbf{P} _{cm\text{ }}\) es una constante de movimiento donde\[\mathbf{P}_{cm}=\frac{\partial L}{\partial \mathbf{\dot{R}}}=M\mathbf{\dot{R} }\]
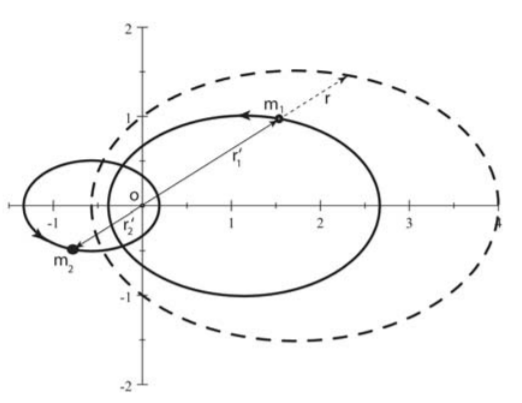
Es conveniente trabajar en el marco de centro de masa utilizando el Lagrangiano efectivo\(L_{cm}\). En el marco de referencia del centro de masa, se ignora la energía cinética de traslación\(\frac{1}{2}M\left\vert \mathbf{\dot{R}}\right\vert ^{2}\) asociada con el movimiento del centro de masa, y solo se considera la energía en el centro de masa. Esta energía de centro de masa es la energía involucrada en la interacción entre los cuerpos colisionantes. Así, en el centro de masa, el problema se ha reducido a un problema equivalente de un cuerpo de una masa que se\(\mu\) mueve alrededor de un centro de fuerza fijo con una trayectoria dada por la\(\mathbf{r}\) cual es el vector de separación entre los dos cuerpos, como se muestra en la figura\(\PageIndex{2}\). En realidad, ambas masas giran alrededor de su centro de masa, también llamado baricentro, en el marco de centro de masa como se muestra en la Figura\(\PageIndex{2}\). Conocer\(\mathbf{r}\ \) permite calcular la trayectoria de cada masa alrededor del centro de masa\(\mathbf{r}_{1}^{\prime }\).\(\mathbf{r} _{2}^{\prime }\) Por supuesto, el verdadero camino en el marco de referencia de laboratorio debe tomar en cuenta tanto el movimiento traslacional del centro de masa, además del movimiento de la representación equivalente de un cuerpo relativo al baricentro. Tenga cuidado de recordar la diferencia entre las trayectorias reales de cada cuerpo, y la trayectoria efectiva asumida al usar la masa reducida que solo determina la separación relativa\(\mathbf{r}\) de los dos cuerpos. Esta reducción a un problema equivalente de un solo cuerpo simplifica enormemente la solución del movimiento, pero tergiversa las trayectorias reales y las ubicaciones espaciales de cada masa en el espacio. La representación equivalente de un solo cuerpo se utilizará ampliamente a lo largo de este capítulo.