
11.3: Momentum Angular
- Page ID
- 126921
Momento angular\(\mathbf{L}\)
La notación utilizada para el vector de momento angular es\(\mathbf{L}\) donde la magnitud es designada por\(\left\vert \mathbf{L}\right\vert =\)\(l\). Tenga cuidado de no confundir el vector de momento angular\(\mathbf{L}\) con el Lagrangiano\(L_{cm}.\) Tenga en cuenta que el momento angular para la rotación de dos cuerpos alrededor del centro de masa con la velocidad angular\(\omega\) es idéntico cuando se evalúa en la representación de laboratorio o equivalente de dos cuerpos. Es decir, usando ecuaciones\((11.2.6)\) y\((11.2.7)\)\[\mathbf{L=m}_{1}r_{1}^{\prime 2}\mathbf{\omega +m}_{2}r_{2}^{\prime 2} \mathbf{\omega =}\mu r^{2}\mathbf{\omega }\]
El centro de masa Lagrangiano conduce a las siguientes dos propiedades generales con respecto al vector de momento angular\(\mathbf{L}\).
1) El movimiento se encuentra enteramente en un plano perpendicular a la dirección fija del vector de momento angular total. Esto se debe a que
\[\mathbf{L}\cdot \mathbf{r}=\mathbf{r}\times \mathbf{p}\cdot \mathbf{r}=0\]
es decir, el vector de radio está en el plano perpendicular al vector de momento angular total. Así, es posible expresar lo lagrangiano en coordenadas polares,\((r,\psi )\) más que en coordenadas esféricas. En coordenadas polares el centro de masa Lagrangiano se convierte en\[L_{cm}= \frac{1}{2}\mu \left( \dot{r}^{2}+r^{2}\dot{\psi}^{2}\right) -U(r)\]
2) Si el potencial es esféricamente simétrico, entonces el ángulo polar\(\psi\) es cíclico y por lo tanto el teorema de Noether da que el momento angular\(\mathbf{p}_{\psi }\equiv \mathbf{L}=\mathbf{r\times p}\) es una constante de movimiento. Es decir, desde\(\frac{\partial L_{cm}}{\partial \psi } =0,\) entonces las ecuaciones de Lagrange implican que
\[\mathbf{\dot{p}}_{\psi }=\frac{d}{dt}\frac{\partial L_{cm}}{\partial \mathbf{ \dot{\psi}}}=0 \label{11.23}\]
donde los vectores\(\mathbf{\dot{p}}_{\psi }\) e\(\mathbf{\dot{\psi}}\) implican que la Ecuación\ ref {11.23} se refiere a tres ecuaciones independientes correspondientes a los tres componentes de estos vectores. Así, el momento angular\(\mathbf{p}_{\psi },\) conjugado a\(\mathbf{\psi },\) es una constante de movimiento. El impulso generalizado\(\mathbf{p} _{\psi }\) es una primera integral del movimiento que iguala
\[\label{11.24}\mathbf{p}_{\psi }=\frac{\partial L_{cm}}{\partial \mathbf{\dot{\psi}}}=\mu r^{2}\mathbf{\dot{\psi}}=\mathbf{\hat{p}}_{\psi }l\]
donde la magnitud del momento angular\(l\), y la dirección\(\mathbf{ \hat{p}}_{\psi },\) ambas son constantes de movimiento.
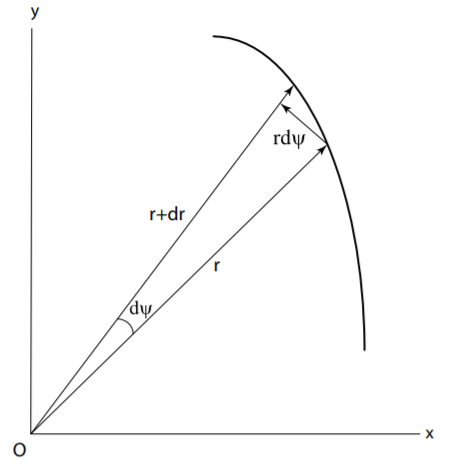
En la Figura se ilustra una interpretación geométrica simple de la Ecuación\ ref {11.24}\(\PageIndex{1}\). El vector de radio barre un área\(d\mathbf{A}\) en el tiempo\(dt\) donde
\[d\mathbf{A}=\frac{1}{2}\mathbf{r\times v}dt\]
y el vector\(\mathbf{A}\) es perpendicular al\(x-y\) plano. La tasa de cambio de área es
\[\frac{d\mathbf{A}}{dt}=\frac{1}{2}\mathbf{r\times v}\]
Pero el momento angular es
\[\mathbf{L}=\mathbf{r}\times \mathbf{p}=\mu \mathbf{r\times v}=2\mu \frac{d \mathbf{A}}{dt}\]
Así, la conservación del momento angular implica que la velocidad superficial\(\frac{dA}{dt}\) también es una constante de movimiento. Este hecho se llama la segunda ley de movimiento planetario de Kepler que dedujo en\(1609\) base a los\(55\) años de registros observacionales de Tycho Brahe del movimiento de Marte. La segunda ley de Kepler implica que un planeta se mueve más rápido cuando está más cerca del sol y más lento cuando está más alejado del sol. Tenga en cuenta que la segunda ley de Kepler es una declaración de la conservación del momento angular que es independiente de la forma radial del potencial central.